
一种基于RFID的室内定位方法.pdf

元枫****文章


1/9
2/9

3/9

4/9

5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于RFID的室内定位方法.pdf
一种基于RFID的室内定位方法,通过在定位区域部署n个RFID读写器、m个参考标签和u个待定位标签,计算每个读写器上参考标签和待定位标签的RSSI差值,并通过设置阈值,将得到的RSSI差值与阈值比较,如果大于该阈值,则判读该参考标签不在该待定位的待选标签范围之内,并舍弃该标签;如果该差值在阈值范围内,则保留该参考标签,并采用LANDMARC定位算法得到待定位标签的位置。这种定位方法与计算定位区域的每一个参考标签与跟踪标签的距离相比,减少了参考标签的使用数目,可以排除部分冗余的计算,加快定位时间。
基于RFID技术的室内定位方法及装置.pdf
本公开提供了一种基于RFID技术的室内定位方法,可以应用于定位技术领域。该基于RFID技术的室内定位方法包括:控制所述RFID天线发射射频信号;获取目标RFID标签的返回消息特征,其中所述返回消息特征包括RFID返回信号强度和返回用时;根据所述目标RFID标签的返回消息特征和预设机器学习分类模型确定所述目标RFID标签的第一位置信息;以及根据所述第一位置信息和目标标签ID确定所述目标RFID标签的第二位置信息。本公开还提供了一种基于RFID技术的室内定位装置、设备、存储介质和程序产品。
一种基于stacking模型的RFID室内定位方法.pdf
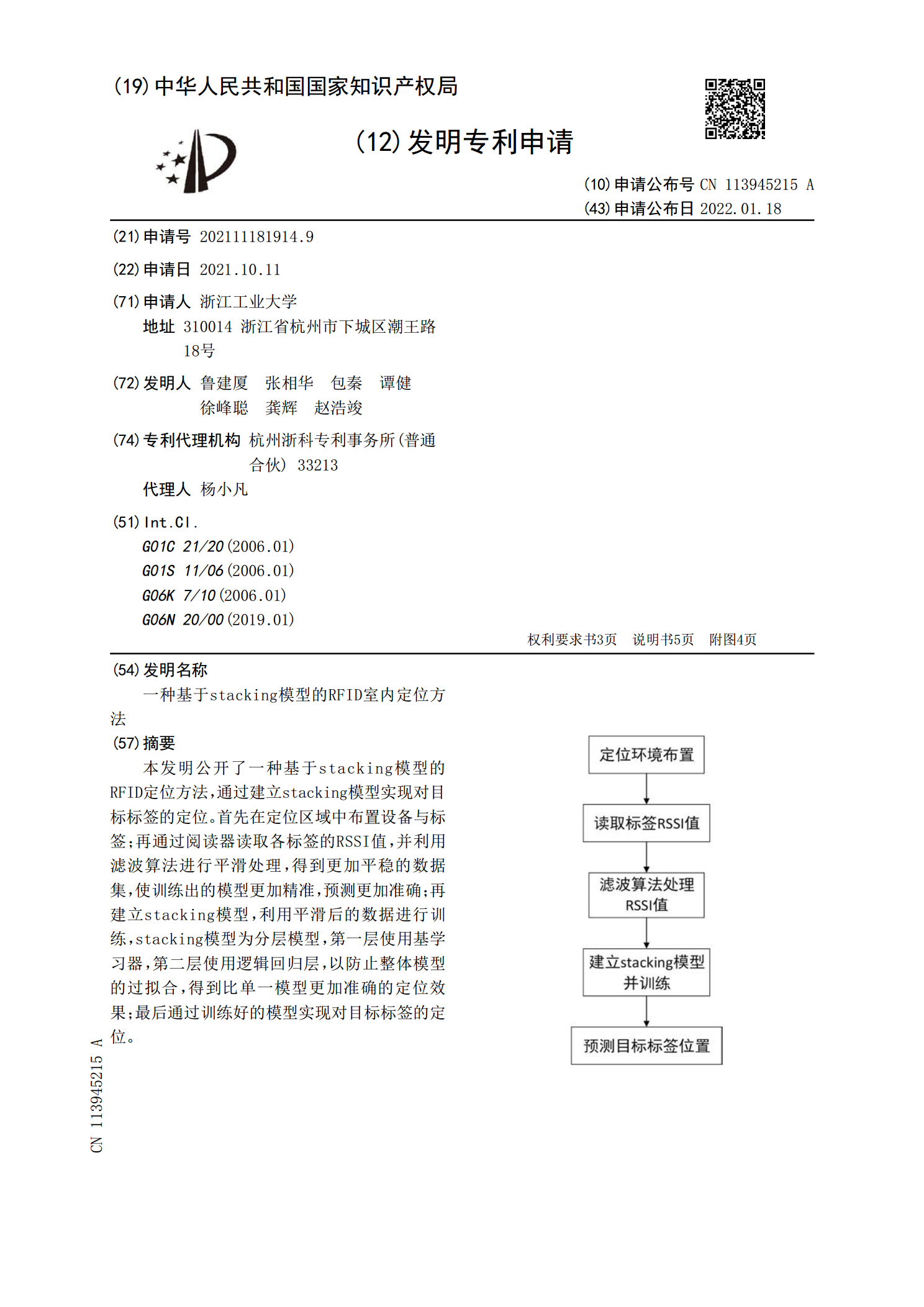
本发明公开了一种基于stacking模型的RFID定位方法,通过建立stacking模型实现对目标标签的定位。首先在定位区域中布置设备与标签;再通过阅读器读取各标签的RSSI值,并利用滤波算法进行平滑处理,得到更加平稳的数据集,使训练出的模型更加精准,预测更加准确;再建立stacking模型,利用平滑后的数据进行训练,stacking模型为分层模型,第一层使用基学习器,第二层使用逻辑回归层,以防止整体模型的过拟合,得到比单一模型更加准确的定位效果;最后通过训练好的模型实现对目标标签的定位。

一种基于RFID的室内定位系统.pdf
本发明提供一种基于RFID的室内定位系统,该系统由无源电子标签,阅读器模块,单片机,无线收发模块,和多个运动的需要被定位的小车组成。无源标签的EPC值为二维平面的坐标即用存储EPC值的4个字节的前2位代表横轴坐标,用剩下的2位代表纵轴坐标。修改好标签的EPC值后将标签部署在地面对应的坐标点。将阅读器模块安装在每个小车的底部,阅读器模块通过串口与单片机相连,单片机每隔0.2s给阅读器发送读标签的指令,单片机在收到阅读器返回的标签的数据后经过特定的算法处理得出坐标,与单片机相连的无线收发模块再将这个坐标发出去
一种基于机器学习的RFID室内定位方法及系统.pdf
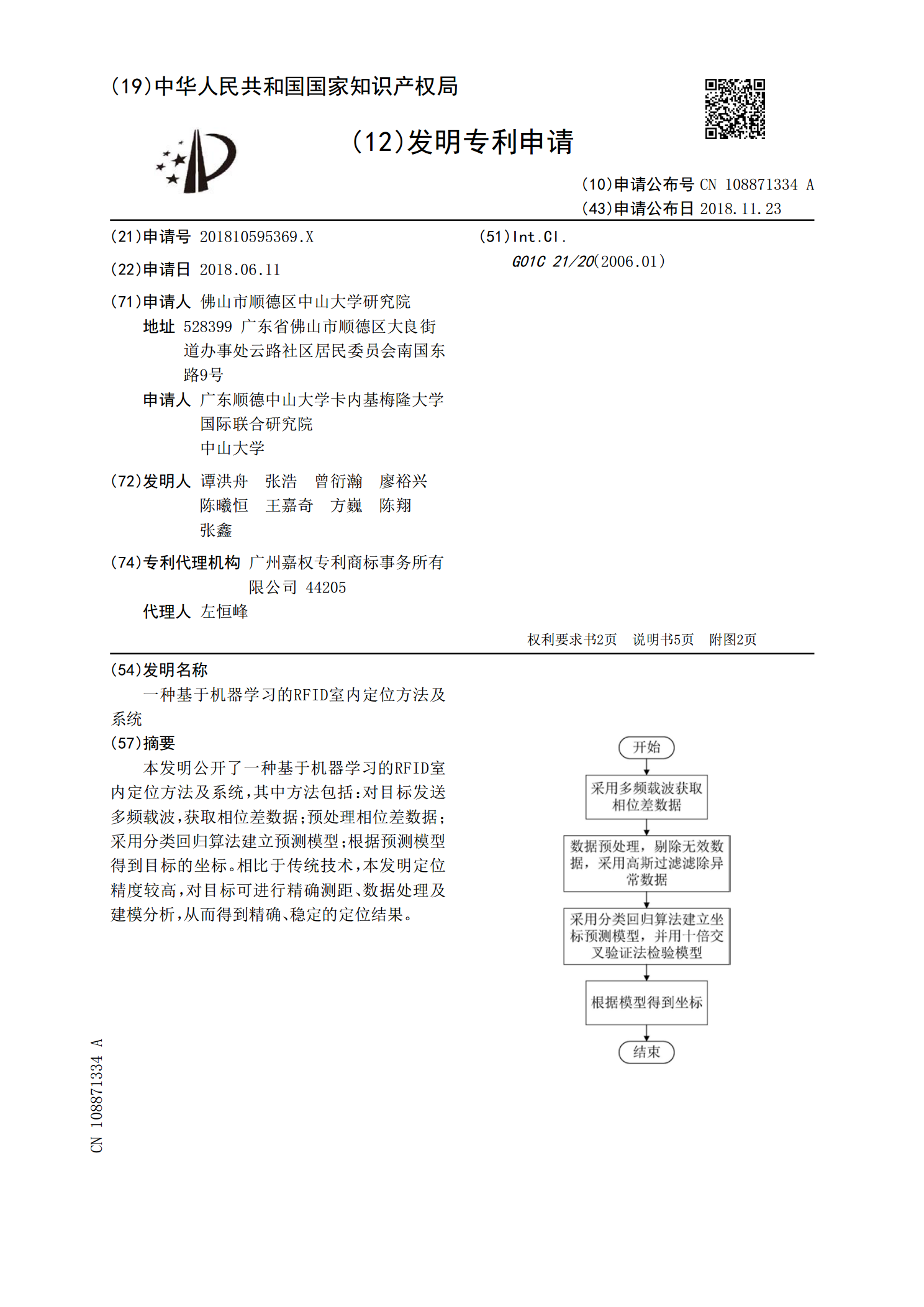
本发明公开了一种基于机器学习的RFID室内定位方法及系统,其中方法包括:对目标发送多频载波,获取相位差数据;预处理相位差数据;采用分类回归算法建立预测模型;根据预测模型得到目标的坐标。相比于传统技术,本发明定位精度较高,对目标可进行精确测距、数据处理及建模分析,从而得到精确、稳定的定位结果。