
基于动态事件触发的切换线性系统H_infinity控制方法.pdf

书錦****by


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于动态事件触发的切换线性系统H_infinity控制方法.pdf
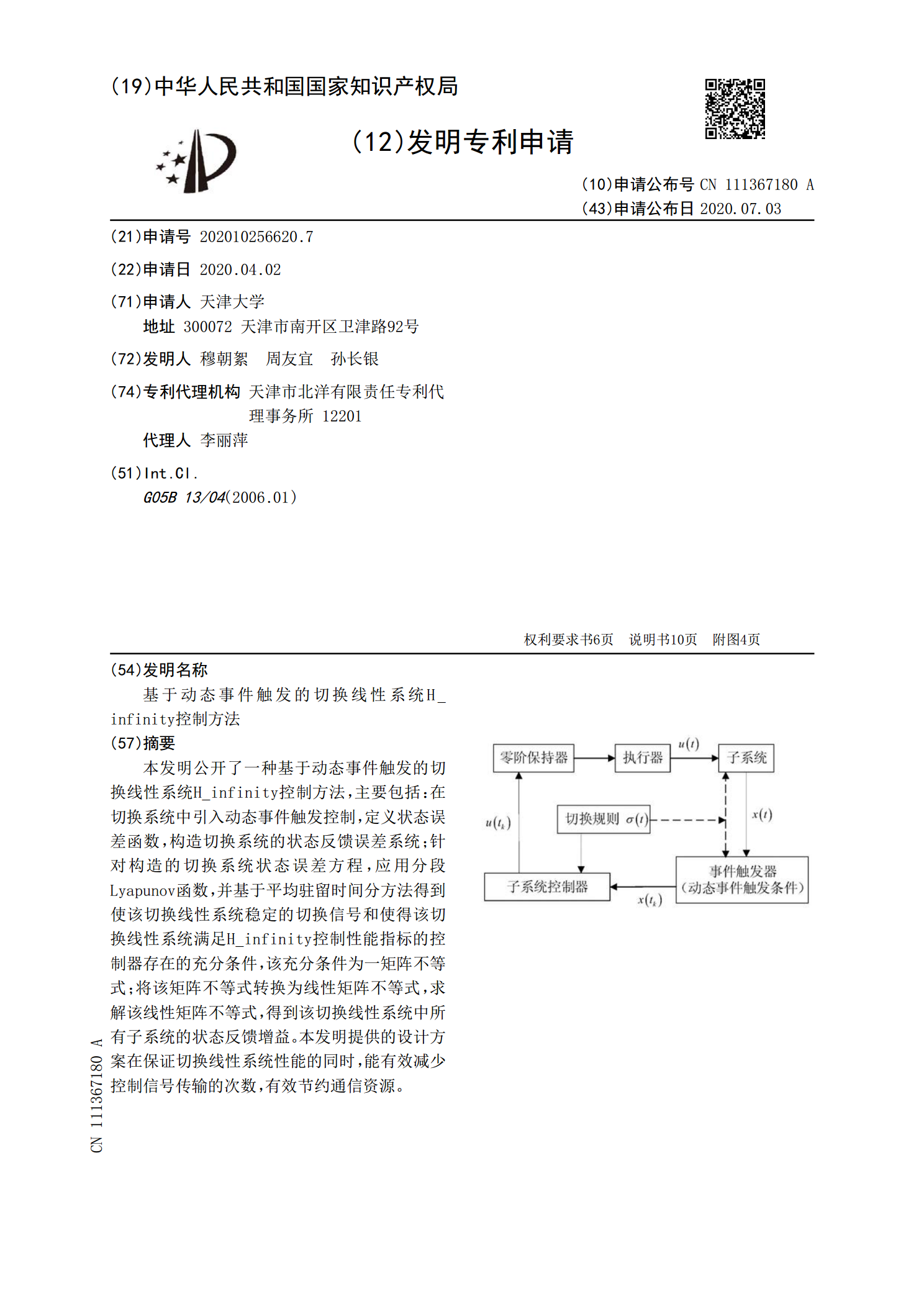
本发明公开了一种基于动态事件触发的切换线性系统H_infinity控制方法,主要包括:在切换系统中引入动态事件触发控制,定义状态误差函数,构造切换系统的状态反馈误差系统;针对构造的切换系统状态误差方程,应用分段Lyapunov函数,并基于平均驻留时间分方法得到使该切换线性系统稳定的切换信号和使得该切换线性系统满足H_infinity控制性能指标的控制器存在的充分条件,该充分条件为一矩阵不等式;将该矩阵不等式转换为线性矩阵不等式,求解该线性矩阵不等式,得到该切换线性系统中所有子系统的状态反馈增益。本发明提供

基于采样的线性系统事件触发控制研究.docx
基于采样的线性系统事件触发控制研究基于采样的线性系统事件触发控制研究摘要:事件触发控制是一种有效的控制策略,用来减少系统的计算量和通讯负载。本文致力于研究基于采样的线性系统事件触发控制方法,分析其优势和应用领域,并讨论了事件触发条件的选择和设计。实验结果表明,采样的线性系统事件触发控制方法能够降低系统的计算和通讯成本,提高控制性能。关键词:事件触发控制,基于采样,线性系统1.引言控制理论和方法在工程领域有着广泛的应用和重要性。传统的控制方法通常依赖于连续测量和控制信号,这会导致计算量大、通讯负荷高等问题。

线性切换系统:事件触发控制、滤波与广义动态分析.docx
线性切换系统:事件触发控制、滤波与广义动态分析线性切换系统:事件触发控制、滤波与广义动态分析摘要:线性切换系统(LinearSwitchingSystems,LSS)是一类具有离散模态的线性系统,它们的模态切换是通过离散事件来触发的。本文将研究LSS中的事件触发控制、滤波以及广义动态分析的相关问题。首先,我们介绍了LSS的基本理论和模型,并分析了事件触发控制的目标和方法。接着,我们探讨了滤波在LSS中的应用,讨论了不同的滤波设计方法和性能评估指标。最后,我们研究了LSS的广义动态分析,通过广义动态分析可以
基于改进LVS制导的无人帆船动态事件触发控制方法.pdf
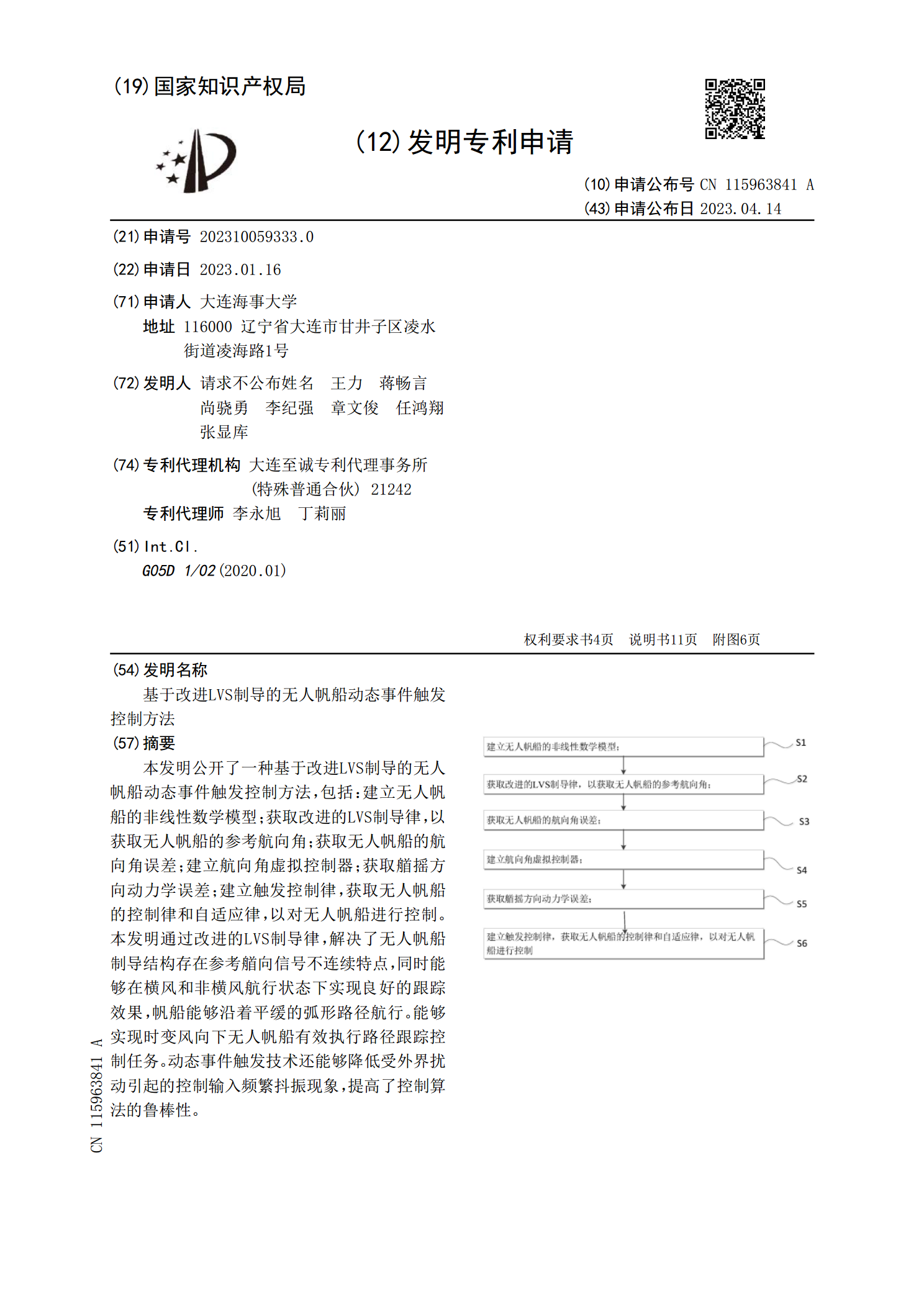
本发明公开了一种基于改进LVS制导的无人帆船动态事件触发控制方法,包括:建立无人帆船的非线性数学模型;获取改进的LVS制导律,以获取无人帆船的参考航向角;获取无人帆船的航向角误差;建立航向角虚拟控制器;获取艏摇方向动力学误差;建立触发控制律,获取无人帆船的控制律和自适应律,以对无人帆船进行控制。本发明通过改进的LVS制导律,解决了无人帆船制导结构存在参考艏向信号不连续特点,同时能够在横风和非横风航行状态下实现良好的跟踪效果,帆船能够沿着平缓的弧形路径航行。能够实现时变风向下无人帆船有效执行路径跟踪控制任务

不确定切换系统的事件触发与动态量化控制的开题报告.docx
不确定切换系统的事件触发与动态量化控制的开题报告题目:不确定切换系统的事件触发与动态量化控制的研究1.研究背景与意义不确定切换系统(SwitchedSystems)是一类由多个模态(Mode)组成的动态系统,其在不同模态下存在不同的动力学特性。在控制工程和科学中,不确定切换系统被广泛应用于复杂实时系统的建模与控制中,如智能交通系统、航空控制系统、机器人系统等。然而,在实际应用中,不确定切换系统常受到模型不确定性、外部干扰、传感器噪声等因素的影响,容易导致系统的不稳定性、性能下降和安全隐患。因此,研究如何准