
一种基于低秩恢复的隧道点云去噪方法.pdf

Ja****20


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于低秩恢复的隧道点云去噪方法.pdf
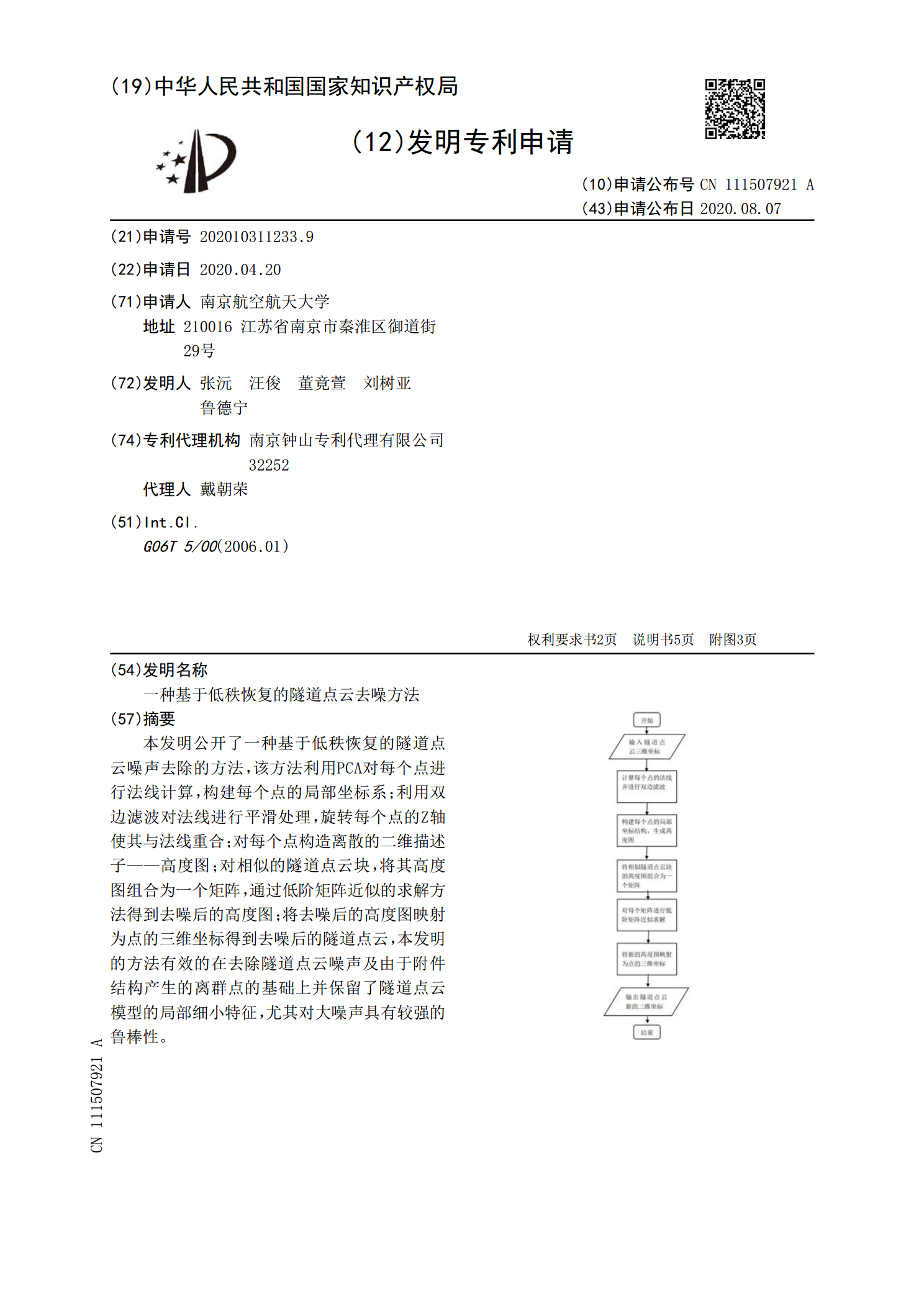
本发明公开了一种基于低秩恢复的隧道点云噪声去除的方法,该方法利用PCA对每个点进行法线计算,构建每个点的局部坐标系;利用双边滤波对法线进行平滑处理,旋转每个点的Z轴使其与法线重合;对每个点构造离散的二维描述子——高度图;对相似的隧道点云块,将其高度图组合为一个矩阵,通过低阶矩阵近似的求解方法得到去噪后的高度图;将去噪后的高度图映射为点的三维坐标得到去噪后的隧道点云,本发明的方法有效的在去除隧道点云噪声及由于附件结构产生的离群点的基础上并保留了隧道点云模型的局部细小特征,尤其对大噪声具有较强的鲁棒性。

基于低秩矩阵恢复的图像去噪算法研究.docx
基于低秩矩阵恢复的图像去噪算法研究摘要:本文针对图像去噪问题,提出一种基于低秩矩阵恢复的算法。该算法通过将原始图像分解成低秩部分和稀疏部分,利用低秩矩阵恢复技术恢复出原始图像,从而达到去噪的目的。实验结果表明,该算法能够有效地去除图像中的噪声,保持图像细节和信息的完整性。关键词:图像去噪,低秩矩阵恢复,噪声抑制,稀疏表示一、引言随着数字图像技术的飞速发展,人们越来越倾向于将数字图像应用于各种领域。然而,数字图像中常常存在着各种噪声,如加性噪声、乘性噪声、运动模糊等噪声。这些噪声会极大影响数字图像的质量和可

基于椭圆拟合的隧道点云去噪方法.docx
基于椭圆拟合的隧道点云去噪方法基于椭圆拟合的隧道点云去噪方法摘要:隧道点云数据是构建隧道模型和进行隧道监测的重要数据来源。然而,隧道点云数据通常包含噪声和离群点,这会对后续的分析和应用带来困难。本文提出一种基于椭圆拟合的隧道点云去噪方法。首先,利用椭圆拟合算法对隧道点云进行拟合,得到隧道轮廓。然后,根据椭圆拟合结果,在点云中进行局部邻域的选择。接下来,通过计算局部邻域的椭圆拟合误差,对点云进行筛选和剔除。最后,通过对比实验验证了本方法的去噪效果和准确性。关键词:隧道点云数据;椭圆拟合;去噪;拟合误差1.引

基于自适应低秩去噪的近似消息传递压缩感知恢复.docx
基于自适应低秩去噪的近似消息传递压缩感知恢复基于自适应低秩去噪的近似消息传递压缩感知恢复摘要:压缩感知(CS)技术是一种可用于高效采集和恢复稀疏信号的方法。在压缩感知中,部分采样的信号被测量,并且从这些测量值中恢复原始信号。然而,传统的CS方法在面对噪声时表现不佳。本文提出了一种基于自适应低秩去噪的近似消息传递压缩感知恢复方法,该方法能够在噪声环境下提高恢复效果。1.引言压缩感知是一种通过尽量减少采样量来获得原始信号的方法。它可以有效地采集和恢复稀疏信号,从而节省了存储和传输的开销。但是,在实际应用中,信

基于低秩矩阵恢复的图像去噪算法研究的任务书.docx
基于低秩矩阵恢复的图像去噪算法研究的任务书任务书题目:基于低秩矩阵恢复的图像去噪算法研究任务目的:随着图像处理技术的不断发展,人们对于图像的要求也逐步提升,但图像的质量往往受到噪声的影响。因此,如何有效地去除图像中的噪声,提升图像的质量,成为了研究的热点。目前,基于低秩矩阵恢复的图像去噪算法已经成为了图像处理领域的研究热点。本次研究旨在探究低秩矩阵恢复算法在图像去噪方面的应用,进一步提高图像的质量。任务内容:1.调研低秩矩阵恢复算法对低秩矩阵恢复算法进行综述和分析,了解目前低秩矩阵恢复在图像处理中的应用和