
一种基于动态网格划分的非标零件载荷分析方法及系统.pdf

戊午****jj


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于动态网格划分的非标零件载荷分析方法及系统.pdf
本发明提出了一种基于动态网格划分的非标零件载荷分析方法及系统,采用固有频率和动态受力分析相结合的方式,考虑到零件所受载荷的情况,对复杂工况的载荷可以采用曲线拟合的方式得到时间和载荷数据,比一般的设计法更贴合实际,不用给零件过多的安全系数,在轻量化的基础上获得高性能的零件,可以有效降低零件的生产成本。通过建立优化零件数据库,在多个零件中筛选出最佳方案,可以做到经济性与零件质量的有机结合。并且零件数据库可以存留作为类似零件设计的参考案例。针对不同形状的零件,采用不同的网格划分方式,保证计算结果的精确可靠。

基于网格化的网络规划分析方法.docx
基于网格化的网络规划分析方法基于网格化的网络规划分析方法摘要:随着互联网的快速发展和广泛应用,网络规划分析在网络设计、网络优化和网络安全等领域起着重要作用。本文介绍了基于网格化的网络规划分析方法,着重介绍了网格化技术在网络规划分析中的应用,包括基于网格的网络建模、基于网格的网络优化算法和基于网格的网络安全分析。结果表明,基于网格化的网络规划分析方法能够提高网络的性能和安全性。1.引言网络规划分析是指在确定网络结构、优化网络性能和评估网络安全性能的过程中,利用数学建模和分析方法进行决策。传统的网络规划分析方

一种基于动态网格划分的时序数据趋势特征提取方法.pdf
本发明提出一种基于动态网格划分的时序数据趋势特征提取方法,包括以下步骤:设定目标数N,根据时序数据的密度分布动态划分网格,将时序数据的时间和值分别划分为m段和n段;遍历每个网格内的局部数据,采用线性分割计算距离的方式,获取关键特征点的优先级队列;汇总各网格中提取的关键特征点的优先级队列,得到原数据的一维特征子序列S1;根据目标数N,在时间序列中等间隔的抽取数据点,得到原数据的一维趋势子序列S2;整合特征子序列S1和趋势子序列S2得到用于数据挖掘的新序列S。本发明可用少量数据点保留时序数据中的关键特征点和趋

连续采煤机行走系统的动态载荷分析方法.docx
连续采煤机行走系统的动态载荷分析方法摘要本文研究了连续采煤机行走系统的动态载荷分析方法。首先,介绍了连续采煤机的结构特点和行走系统的组成,分析了行走系统在工作过程中受到的动态载荷。然后,介绍了常用的载荷分析方法,并详细阐述了基于有限元法的动态载荷分析方法。最后,以某型号连续采煤机为例,进行了动态载荷分析,并得出了相应的分析结果。结果表明,连续采煤机行走系统在工作过程中受到的动态载荷是很大的,采用有限元法计算得到的载荷分布情况精度较高,可为工程实际应用提供参考。关键词:连续采煤机;行走系统;动态载荷;有限元
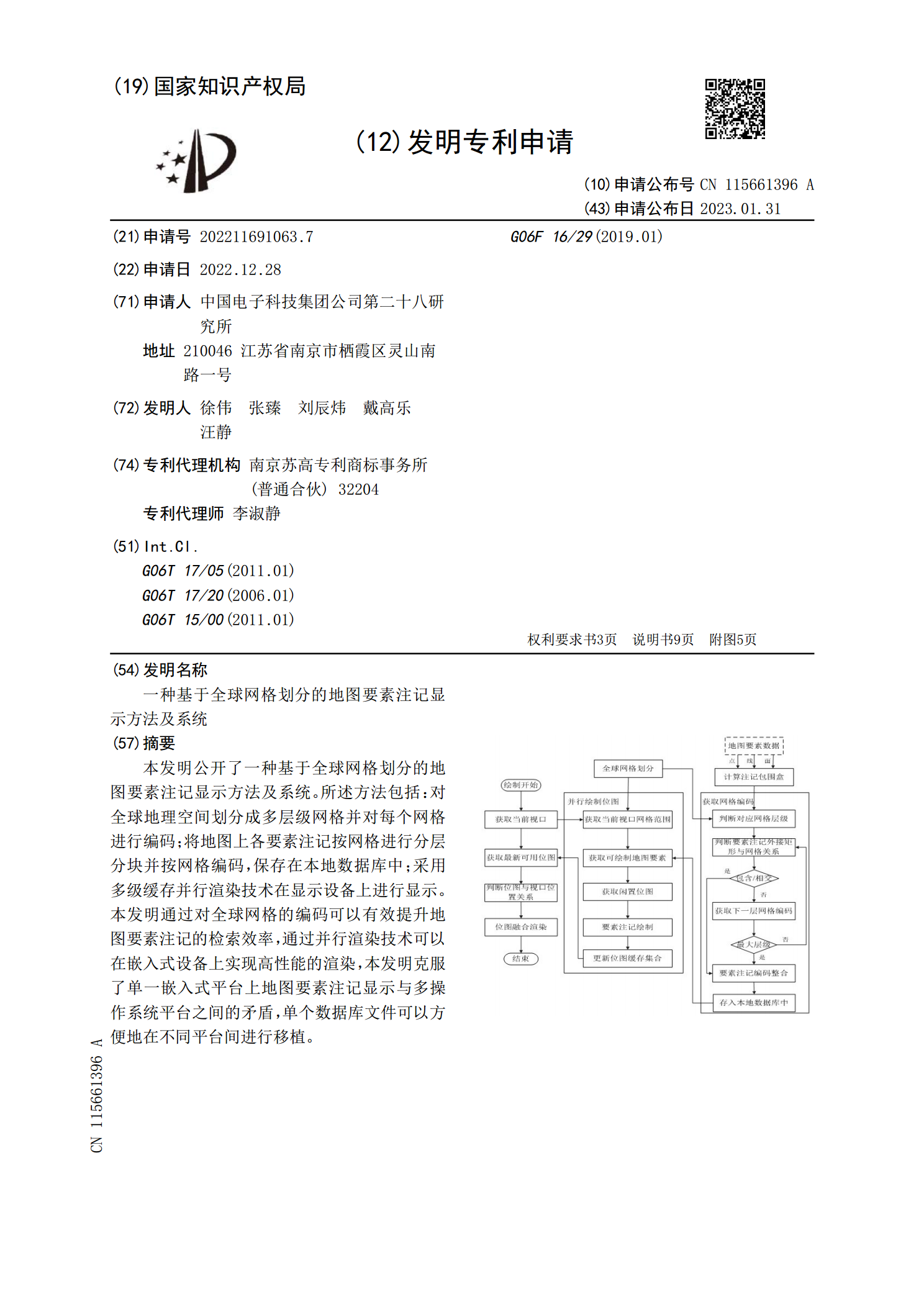
一种基于全球网格划分的地图要素注记显示方法及系统.pdf
本发明公开了一种基于全球网格划分的地图要素注记显示方法及系统。所述方法包括:对全球地理空间划分成多层级网格并对每个网格进行编码;将地图上各要素注记按网格进行分层分块并按网格编码,保存在本地数据库中;采用多级缓存并行渲染技术在显示设备上进行显示。本发明通过对全球网格的编码可以有效提升地图要素注记的检索效率,通过并行渲染技术可以在嵌入式设备上实现高性能的渲染,本发明克服了单一嵌入式平台上地图要素注记显示与多操作系统平台之间的矛盾,单个数据库文件可以方便地在不同平台间进行移植。