
一种基于动态连续称重智能补偿算法.pdf

猫巷****觅蓉


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于动态连续称重智能补偿算法.pdf
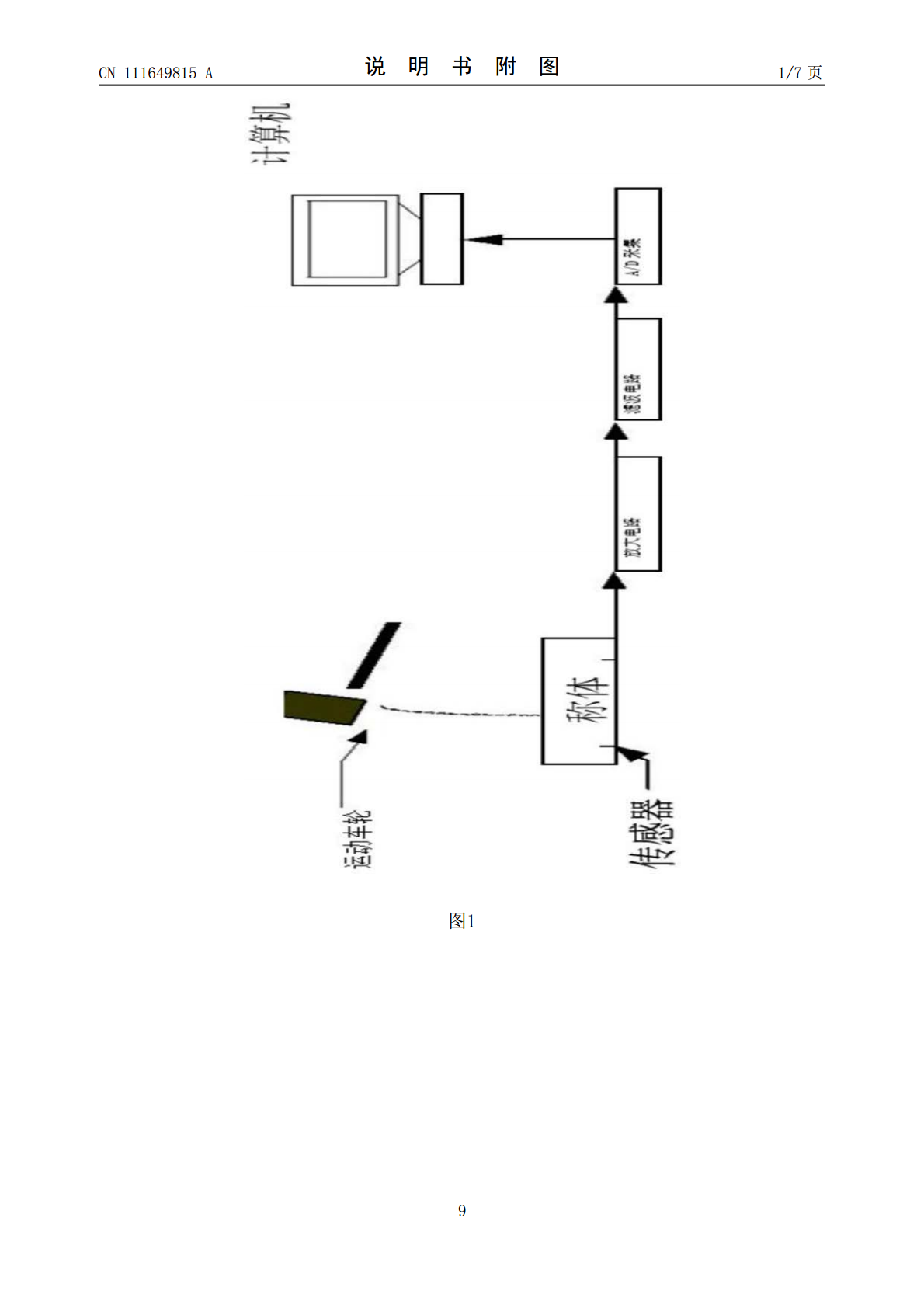
一种基于动态连续称重智能补偿算法,建立应变式压力传感器以及秤体构成的称重部分的微分方程;利用测试系统动力学中的时间域建模法对传感器进行建模,确定系统的动态参数固有频率ωn和阻尼比ζ;加入串联补偿环节Hc(s),串连在传感器的H(s)的后面,以形成一个等效系统He(s);建立传感器的数据模型,计算出阶跃相应;引入模糊控制算法消除冲击力F(t)的影响;引入仿人智能积分控制算法消除留空量△G的影响。本发明对传感器进行补偿的方法,使得传感器的振荡得以有效抑制,同时引入的利用具有仿人智能控制算法的模糊控制器可以有效

动态称重系统数字补偿算法研究.docx
动态称重系统数字补偿算法研究动态称重系统数字补偿算法研究摘要:动态称重系统在工业生产和质量控制中起着重要的作用。然而,由于存在环境噪声和传感器误差等因素,动态称重系统的实际测量结果往往存在较大的偏差。因此,本论文针对动态称重系统的数字补偿算法进行了研究,并提出了一种基于卡尔曼滤波算法的数字补偿方案。该方案通过建立状态空间模型,估计环境噪声和传感器误差对测量结果的影响,并利用卡尔曼滤波算法对测量结果进行补偿,从而提高动态称重系统的测量精度。关键词:动态称重系统,数字补偿算法,卡尔曼滤波,环境噪声,传感器误差

动态称重系统数字补偿算法研究的中期报告.docx
动态称重系统数字补偿算法研究的中期报告中期报告:1.研究背景及意义动态称重系统在车辆物流、公路运输、火车重载运输等领域具有广泛应用。其中数字补偿算法是动态称重系统中最重要的组成部分之一,能够有效地提高动态称重系统的精度和稳定性。本研究旨在针对数字补偿算法进行深入研究,以进一步提高动态称重系统的精度和可靠性。2.研究进展及成果目前,我们已经完成了以下工作:(1)对数字补偿算法进行了系统的研究,掌握了数字补偿算法的基本原理和流程;(2)对现有数字补偿算法进行了评估和比较,选择了适合动态称重系统的最优方案;(3

一种连续动态称重链带式给料机.pdf
本发明公开的一种连续动态称重链带式给料机,由驱动装置、驱动链轮组、张紧链轮组、组合链带、底座、固定导料槽、磅体、称重传感器、转速传感器、磅体导向柱等组成。驱动装置通过驱动链轮组带动组合链带作循环运动,张紧链轮组用于张紧组合链带。磅体由磅台、称重链轮组、吊柱,磅槽组成,称重链轮组与称重段组合链带两侧的套筒滚子链条相啮合,形成对称重段组合链带支撑作用,磅槽通过吊柱安装在磅台上。磅体通过称重传感器和底座相连接,磅槽和固定导料槽共同组成物料运输槽,磅体导向柱用于对磅体的竖直导向。该称重给料机结构紧凑,能够防止输送

基于LSTM神经网络的肉牛动态称重算法研究.docx
基于LSTM神经网络的肉牛动态称重算法研究标题:基于LSTM神经网络的肉牛动态称重算法研究摘要:随着现代畜牧业的发展,肉牛的生长和健康状况成为决定肉牛养殖效益的重要因素之一。动态称重技术可以帮助养殖场主监测肉牛的生长趋势和健康状态。本研究提出了一种基于LSTM(LongShort-TermMemory,长短期记忆)神经网络的肉牛动态称重算法,通过对肉牛生长数据的分析,训练LSTM模型,实现对肉牛的动态称重预测。实验结果表明,所提出的算法能够有效地预测肉牛的体重变化,具有较高的准确性和稳定性,为肉牛养殖管理