
一种鲁棒的模糊图像匹配方法.pdf

是你****深呀


1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种鲁棒的模糊图像匹配方法.pdf
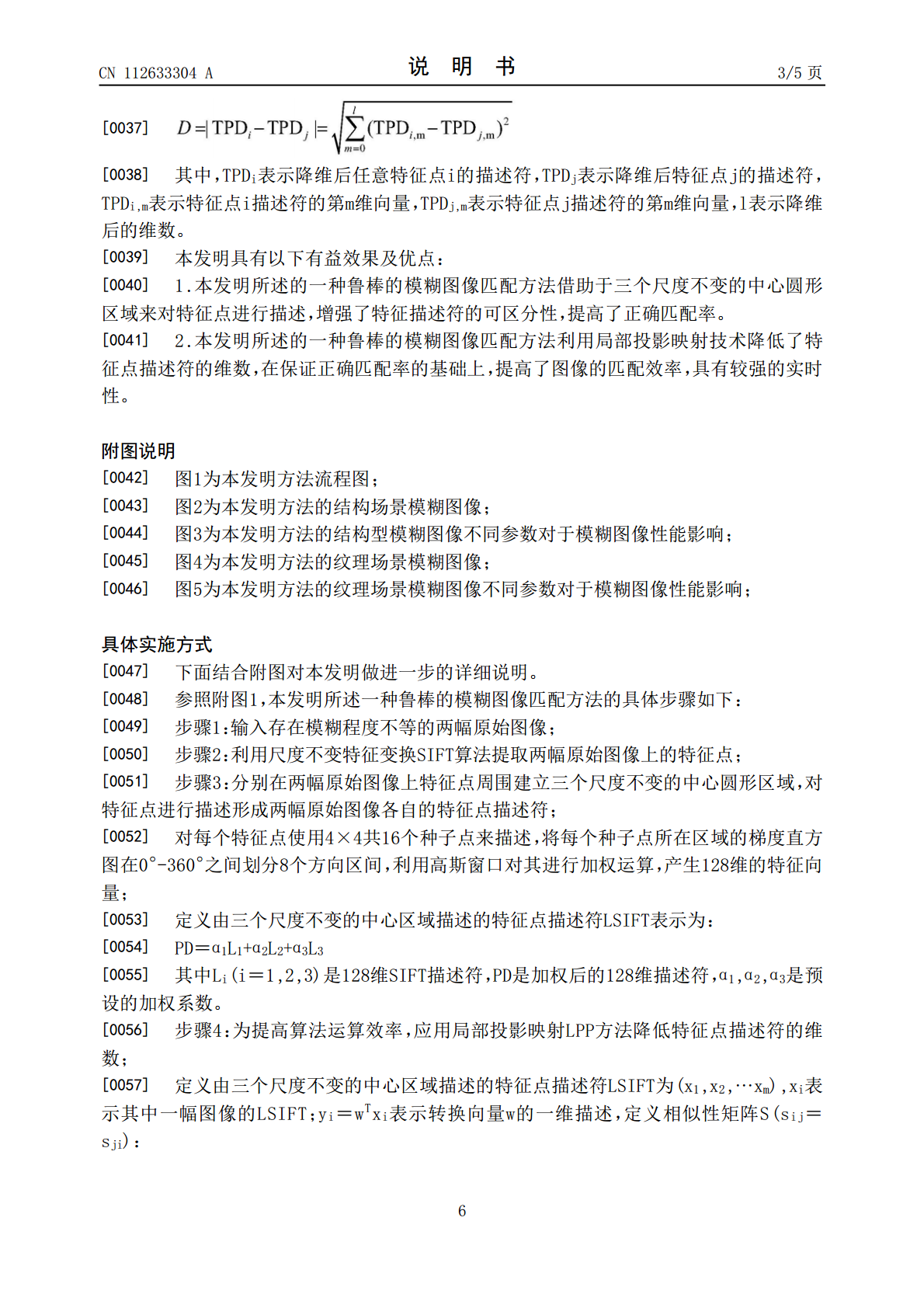
本发明涉及一种鲁棒的模糊图像匹配方法。其步骤为:首先输入存在模糊程度不等的两幅图像。其次,提取了一组尺度不变特征变换SIFT点,为了进一步提高SIFT描述符的特殊性,应用了三尺度不变同心圆区域来生成描述符。第三,为了降低SIFT描述符的高维和复杂性,采用局部保留投影LPP技术来降低描述符的尺寸。最后,利用欧氏距离相似度测量得到匹配特征点。本方法不仅能减少数据量,而且能提高匹配速度和匹配精度,可适用于其他图像匹配方法中。

鲁棒的局部图像特征匹配方法.docx
鲁棒的局部图像特征匹配方法鲁棒的局部图像特征匹配是计算机视觉中的一个重要问题。该问题是指如何在两张图像中快速准确地找到相同的物体或特征点。这个问题在计算机视觉领域中有着广泛的应用,如机器人导航、图像检索、医学图像处理、人脸识别等。为了应对这样的问题,计算机视觉学者们提出了许多不同的算法和技术。其中,基于局部特征的方法已经成为主流的解决方案。这些方法把图像分成若干个小块,然后针对每个块提取出局部特征,再通过匹配局部特征来找到相同的物体或特征点。由于局部特征在图像中具有较高的不变性和独特性,这些方法通常具有较

具有光照鲁棒的图像匹配方法.docx
具有光照鲁棒的图像匹配方法标题:基于光照鲁棒的图像匹配方法摘要:图像匹配是计算机视觉中的一个重要问题,它在许多应用领域中都得到了广泛的应用。然而,光照变化是一种常见的干扰因素,会导致图像匹配的准确性和鲁棒性下降。针对这一问题,本论文提出了一种基于光照鲁棒的图像匹配方法。该方法通过将图像分析和局部特征描述相结合,实现了对光照变化的鲁棒性匹配,从而提高了匹配的准确性和可靠性。实验结果表明,该方法在具有光照变化的情况下能够取得良好的匹配性能,并且对光照变化具有较强的适应能力。关键词:图像匹配,光照鲁棒,局部特征

鲁棒的局部图像特征匹配方法的中期报告.docx
鲁棒的局部图像特征匹配方法的中期报告一、研究背景和意义随着计算机视觉技术的快速发展,图像特征匹配一直是一个重要的研究领域。通常情况下,图像特征匹配是指在两个或多个图像之间找到一些重要的局部特征点,并计算它们之间的相似度,以判断它们是否来自同一物体或场景。因为一些复杂的问题,例如目标追踪、图像分类和三维重建都依赖于图像特征匹配。然而,由于图像受到光照、噪声和几何变换等因素的影响,图像特征匹配仍然是一个具有挑战性的问题。因此,研究如何在这些要素的干扰下有效地进行鲁棒的局部图像特征匹配变得非常必要。本研究的目的

形变虹膜图像的鲁棒特征表达与匹配.docx
形变虹膜图像的鲁棒特征表达与匹配摘要:虹膜识别作为一种双因素身份验证技术,已被广泛应用于各种领域。然而,传统的虹膜识别技术存在一些缺陷,如虹膜图像的质量受限,光照变化等,这些问题使得虹膜识别的准确率受到影响。本文提出了一种形变虹膜图像的鲁棒特征表达与匹配方法,通过将形变虹膜图像表示为形状特征和纹理特征的组合,同时采用了多尺度特征提取和自适应阈值处理等技术,使得新方法具有更高的准确率和更强的鲁棒性。实验结果表明,本文提出的方法在CASIA-IrisV4数据库上取得了更高的识别率和更好的鲁棒性能,可在各种不同