
一种基于缆绳拉力控制的系留飞行机械臂及缆绳拉力控制方法.pdf

和裕****az


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于缆绳拉力控制的系留飞行机械臂及缆绳拉力控制方法.pdf
本发明公开一种基于缆绳拉力控制的系留飞行机械臂,包括飞行器、地面站、机械臂、绳索驱动装置、系留控制装置,机械臂和系留控制装置分别设置于飞行器底部中心的两侧,系留控制装置包括系留缆绳和地面移动平台,系留飞行机械臂的供电部分设置于地面移动平台中,地面移动平台通过系留缆绳为飞行器和绳索驱动装置供电。该系留飞行机械臂将大容量电池设置于地面移动平台,通过系留缆绳对系留飞行机械臂进行供电,可以实现对系留飞行机械臂不间断供电,延长空中作业时间,同时飞行器上无需使用较大容量电池可以减轻机身质量,提高飞行质量。

一种系留气球主缆绳拉力状态评估预警方法.pdf
本发明公开了一种系留气球主缆绳拉力状态评估预警方法,属于电子装备维护技术领域,包括以下步骤:S1:状态数据读取及预处理;S2:筛选关键特征数据;S3:构建拉力预测模型;S4:状态评估预警。本发明通过随机森林方法和皮尔逊系数法筛选影响主缆绳拉力的关键特征,解析关键特征状态数据与主缆绳拉力之间的耦合关系,为后续主缆绳拉力诊断、定位奠定了基石;通过实时监测状态数据,智能预测主缆绳拉力的变化趋势,并对比历史均值数据,合理科学地设定主缆绳阈值范围、平均值范围,实时评估主缆绳拉力的工作状态等级并及时预警,有效推进了装
一种缆绳用拉力测试装置.pdf
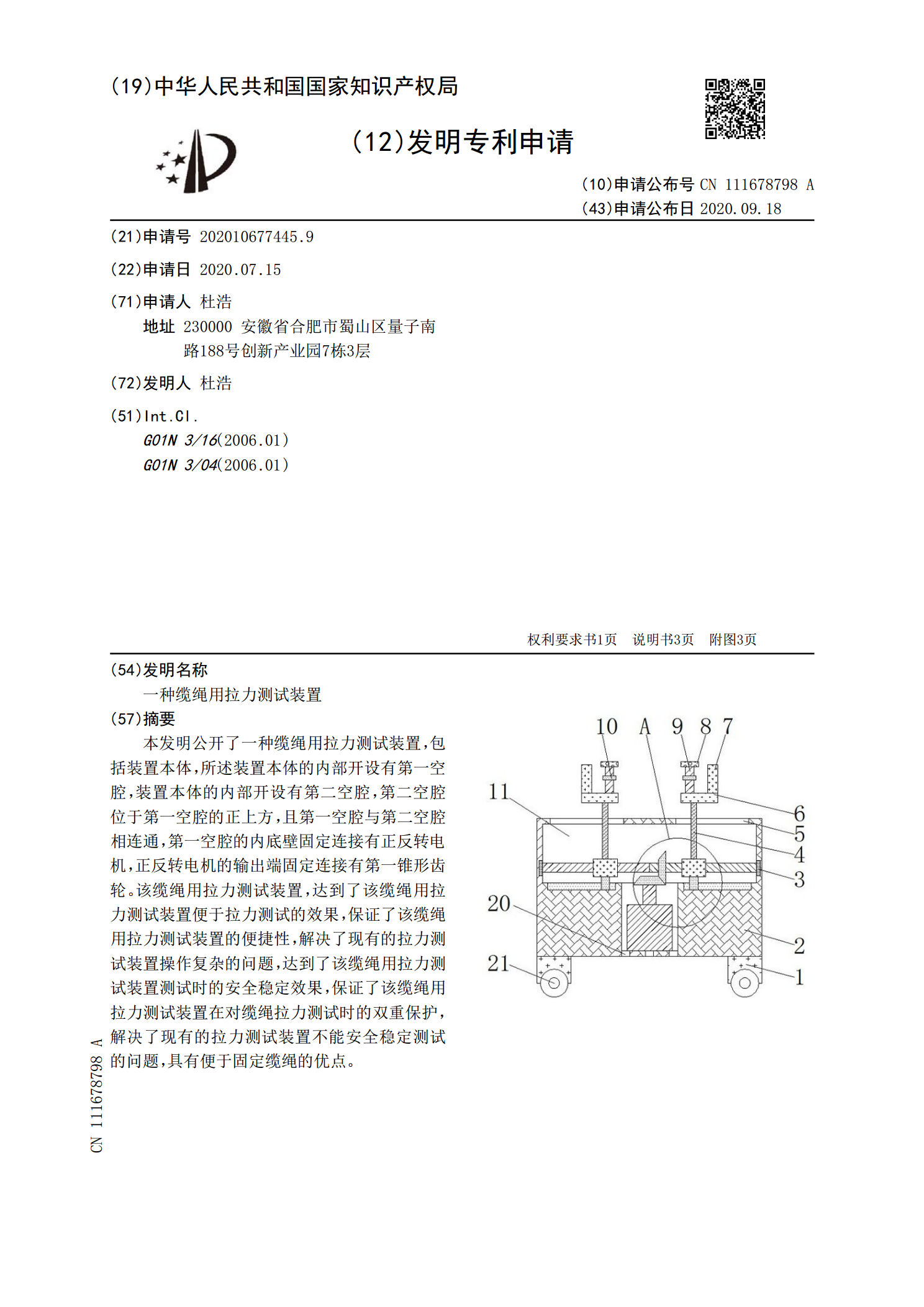
本发明公开了一种缆绳用拉力测试装置,包括装置本体,所述装置本体的内部开设有第一空腔,装置本体的内部开设有第二空腔,第二空腔位于第一空腔的正上方,且第一空腔与第二空腔相连通,第一空腔的内底壁固定连接有正反转电机,正反转电机的输出端固定连接有第一锥形齿轮。该缆绳用拉力测试装置,达到了该缆绳用拉力测试装置便于拉力测试的效果,保证了该缆绳用拉力测试装置的便捷性,解决了现有的拉力测试装置操作复杂的问题,达到了该缆绳用拉力测试装置测试时的安全稳定效果,保证了该缆绳用拉力测试装置在对缆绳拉力测试时的双重保护,解决了现有

自动船舶系泊机及其缆绳拉力整定方法.pdf
本发明公开了一种自动船舶系泊机及其缆绳拉力整定方法,所述自动船舶系泊机包括电动机、缆绳和时间继电器,所述电动机非轴伸端带有直流电磁制动器,所述电动机通过减速齿轮箱和缆绳相连,所述电动机和时间继电器电气相连,并在时间继电器控制下作间歇性启动。本发明提供的自动船舶系泊机及其缆绳拉力整定方法,通过设定电动机的堵转力矩为拉力检测整定值,通过间歇性启动运转实现自动船舶系泊,提高船舶安全可靠性,减轻船员劳动强度。

系留气球缆绳减阻装置及方法.pdf
本发明涉及系留气球系统技术领域,公开了一种系留气球缆绳减阻装置及方法,该系留气球缆绳减阻装置包括:转动安装于缆绳上的至少一个流线型整流罩,在所述缆绳上靠近所述流线型整流罩的上端设置有第一定位环,在所述缆绳上靠近所述流线型整流罩的下端设置有第二定位环。本发明提供的系留气球缆绳减阻装置及方法可以显著降低系留气球缆绳风阻,提高系留气球升空高度。