
一种多针连续电动粒子植入装置及方法.pdf

波峻****99


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多针连续电动粒子植入装置及方法.pdf
本发明涉及医疗器械领域,具体是一种多针连续电动粒子植入装置及方法,包括机架、外针驱动机构、内针驱动机构、弹匣更换机构、外针更换机构,其具体使用步骤如下:S1;外针运动;S2;弹匣定位;S3;弹匣松紧;S4;外针定位;S5;外针松紧;S6;内针运动;S7:粒子植入;能实现连续的粒子植入功能,自动更换弹匣和外针,缩短手术时间,一次性自动操作完成不少于5根针、60颗粒子的种植,采用模块化设计各个机构部分,便于拆卸、消毒清洗和互换,采用微型伺服电机驱动,配备编码器等等必要的传感器,既能手持电动操作,也能够作机器人

粒子植入布针仿真方法及装置.pdf
本发明公开了一种粒子植入布针仿真方法及装置,包括:在医学影像中标记肿瘤目标,建立包含肿瘤目标TV区域和OAR区域的三维模型;计算TV区域的质心P

一种植入针及生产方法.pdf
本发明涉及一种用于将植入物导入患者身体中的植入针;该植入针包括:构造成接纳植入物且被设置在中空针主体中的接纳部、和通过切割中空针主体的尖端部所形成的锥形尖端部;该锥形尖端部还包括:与中空针主体的外周向表面相邻且以预定的相对于针主体轴线的预定角度所形成的第一倾斜表面、和与第一倾斜表面相邻且相对于针主体的边缘点和轴线对称并且以比与预定的相对于针主体轴线的预定角度更相比较大的相对于针主体轴线的角度所形成的一对第二倾斜表面,其中一对第二倾斜表面的外边缘设置为与边缘点相邻的切割边缘,其特征在于:第一倾斜表面的内边缘
植入针和柔性电极的定位方法、装置、设备及介质.pdf
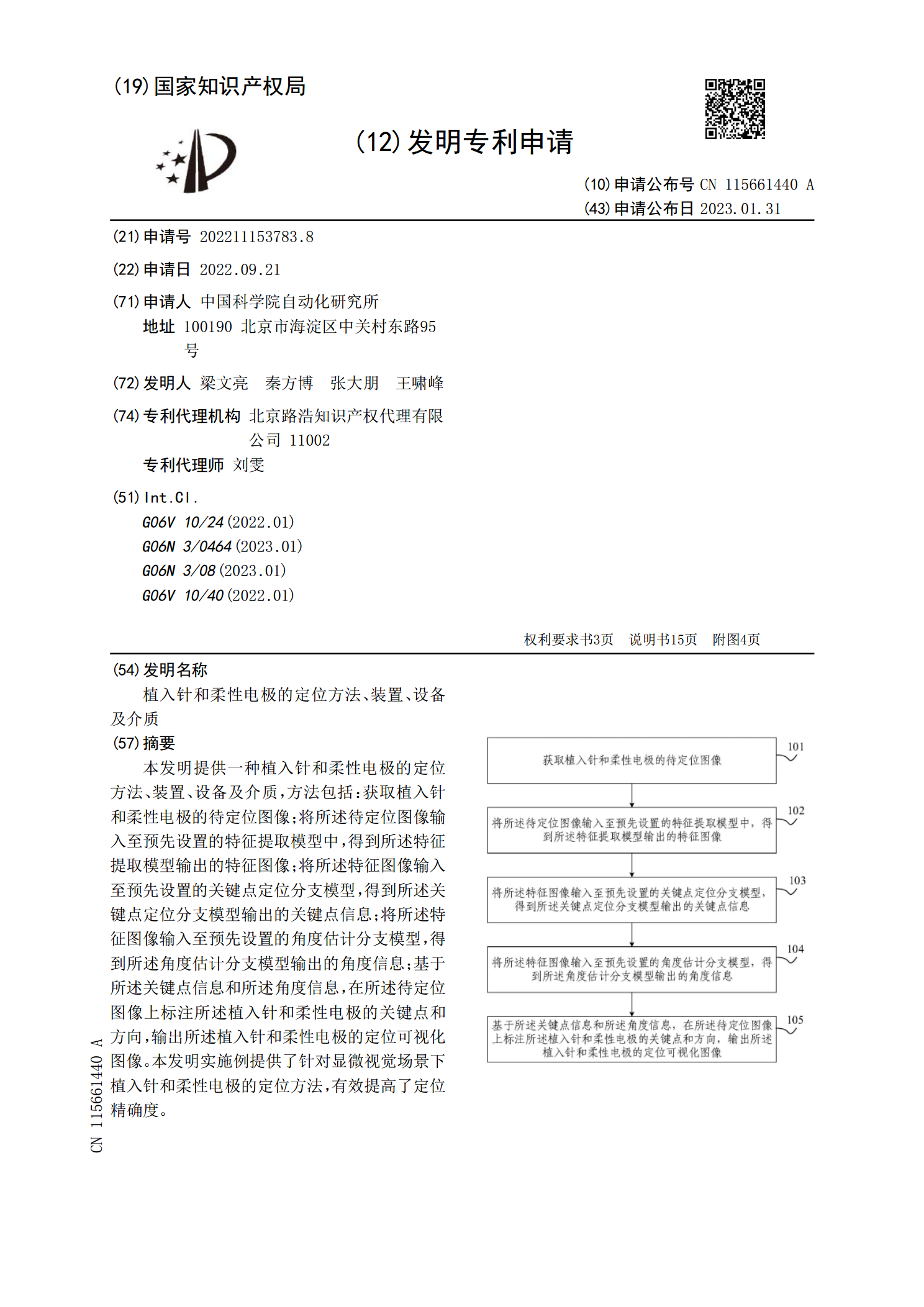
本发明提供一种植入针和柔性电极的定位方法、装置、设备及介质,方法包括:获取植入针和柔性电极的待定位图像;将所述待定位图像输入至预先设置的特征提取模型中,得到所述特征提取模型输出的特征图像;将所述特征图像输入至预先设置的关键点定位分支模型,得到所述关键点定位分支模型输出的关键点信息;将所述特征图像输入至预先设置的角度估计分支模型,得到所述角度估计分支模型输出的角度信息;基于所述关键点信息和所述角度信息,在所述待定位图像上标注所述植入针和柔性电极的关键点和方向,输出所述植入针和柔性电极的定位可视化图像。本发明
一种植入深度可调式助针装置.pdf
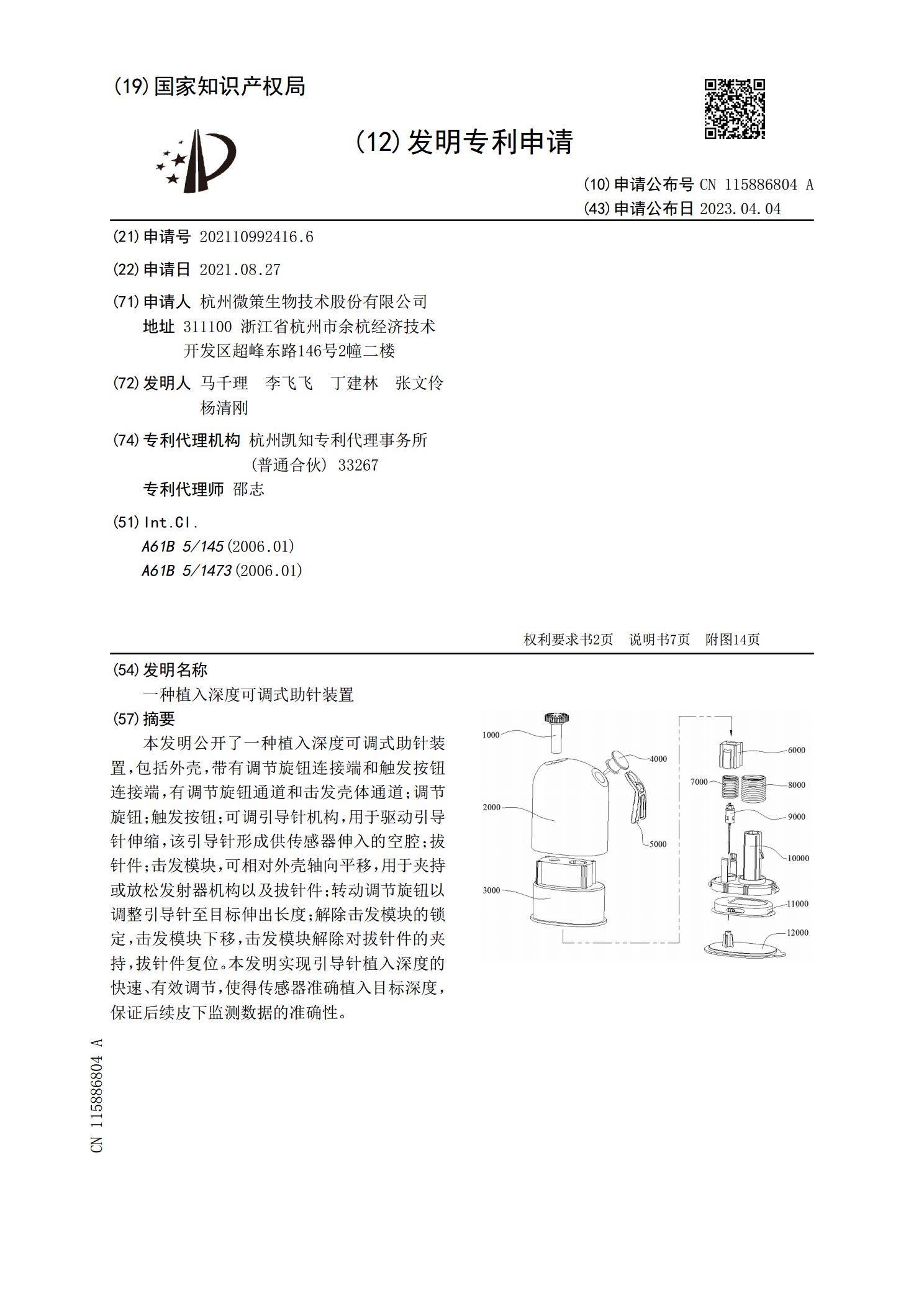
本发明公开了一种植入深度可调式助针装置,包括外壳,带有调节旋钮连接端和触发按钮连接端,有调节旋钮通道和击发壳体通道;调节旋钮;触发按钮;可调引导针机构,用于驱动引导针伸缩,该引导针形成供传感器伸入的空腔;拔针件;击发模块,可相对外壳轴向平移,用于夹持或放松发射器机构以及拔针件;转动调节旋钮以调整引导针至目标伸出长度;解除击发模块的锁定,击发模块下移,击发模块解除对拔针件的夹持,拔针件复位。本发明实现引导针植入深度的快速、有效调节,使得传感器准确植入目标深度,保证后续皮下监测数据的准确性。