
CT图像重建方法、装置、电子设备以及存储介质.pdf

Ro****44


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

CT图像重建方法、装置、电子设备以及存储介质.pdf
本申请实施例提供了一种CT图像重建方法、装置、电子设备以及存储介质。方法包括;将多个标志物固连在被检测物体上;获取多幅不同任意角度带有标志物的被检测物体的投影图像;通过每帧图像上标志物的像素坐标,建立像素坐标与标志物空间坐标的关系,为每帧图像计算实际成像系统与被检测物体之间的成像几何关系;通过数学优化方法提升该几何关系的精度;采用实际工况下对应的高精度几何关系实现三维图像重建,得到被检测物体的CT图像。本发明的成像几何关系比用机械加工和运动控制精度来保证的成像几何关系精度更高,在不要求成像系统控制高精度的

一种CT图像处理方法、装置、存储介质以及电子设备.pdf
本申请公开了一种CT图像处理方法、装置、存储介质以及电子设备。其中方法包括:获取待查看对象对应的目标窗宽信息以及目标窗位信息;基于所述目标窗宽信息以及目标窗位信息获得对应的目标卷积核;基于所述目标卷积核对基础图像进行图像处理,获得目标图像。本申请中通过根据待查看部位/组织对应的目标窗宽信息以及目标窗位信息来自动匹配获得目标卷积核,然后利用目标卷积核对图像进行处理,从而获得与待查看部位/组织对应的目标图像,即实现了卷积核的自动调整,从而能够自适应的满足不同组织图像的临床诊断需求,为后续医护人员能够快速的基于
图像渲染方法、装置、电子设备以及存储介质.pdf
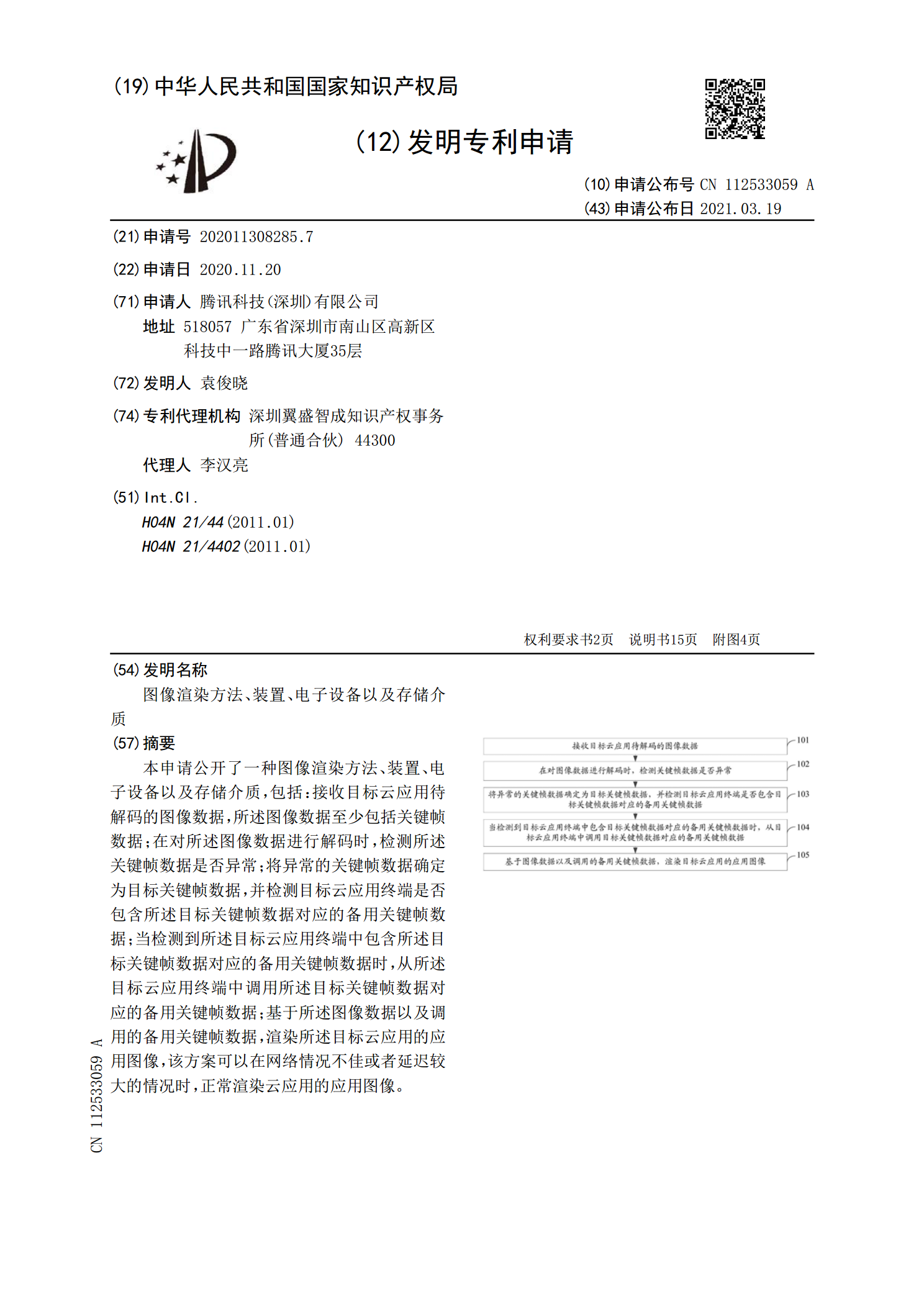
本申请公开了一种图像渲染方法、装置、电子设备以及存储介质,包括:接收目标云应用待解码的图像数据,所述图像数据至少包括关键帧数据;在对所述图像数据进行解码时,检测所述关键帧数据是否异常;将异常的关键帧数据确定为目标关键帧数据,并检测目标云应用终端是否包含所述目标关键帧数据对应的备用关键帧数据;当检测到所述目标云应用终端中包含所述目标关键帧数据对应的备用关键帧数据时,从所述目标云应用终端中调用所述目标关键帧数据对应的备用关键帧数据;基于所述图像数据以及调用的备用关键帧数据,渲染所述目标云应用的应用图像,该方案
图像渲染方法、装置、电子设备以及存储介质.pdf
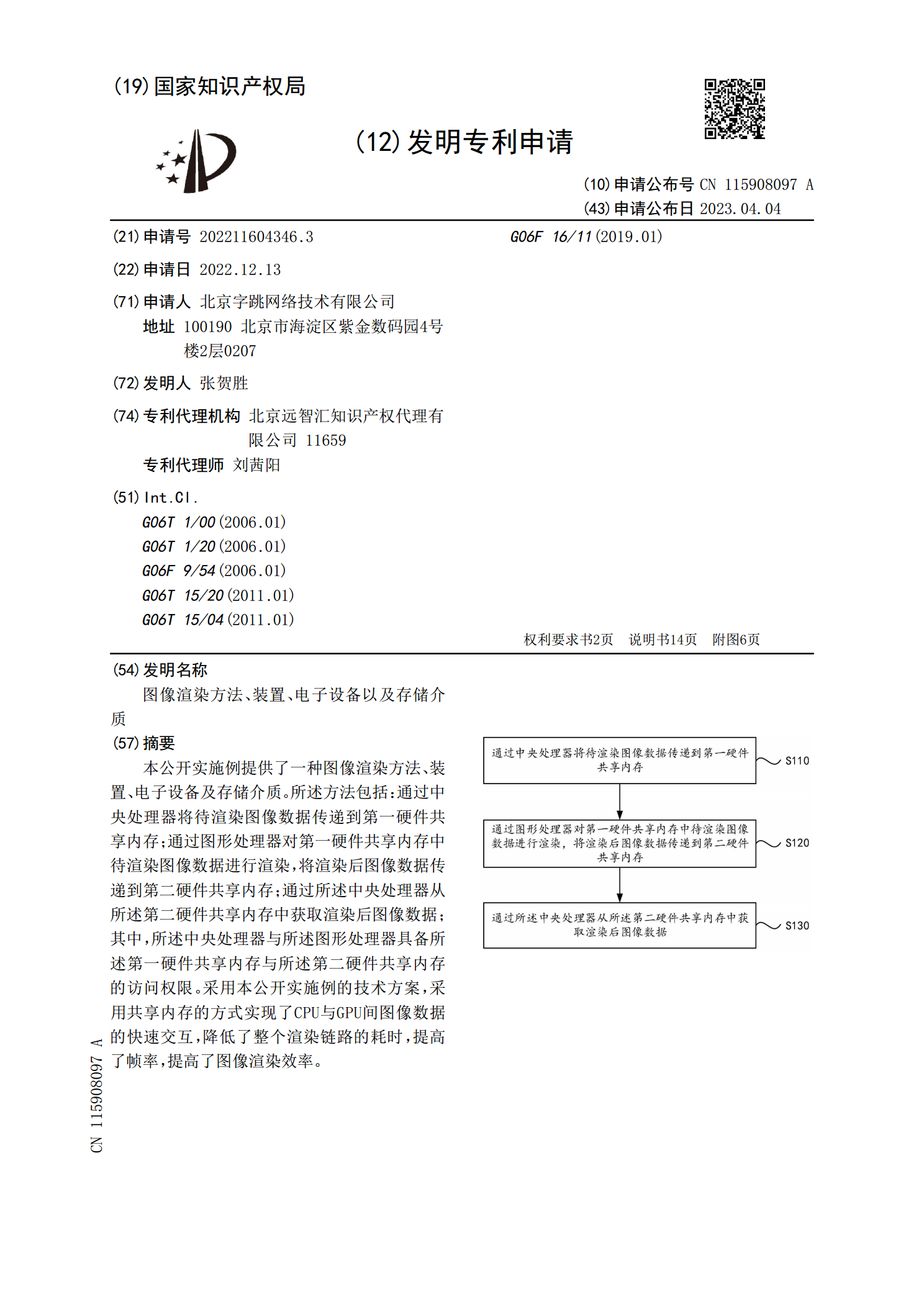
本公开实施例提供了一种图像渲染方法、装置、电子设备及存储介质。所述方法包括:通过中央处理器将待渲染图像数据传递到第一硬件共享内存;通过图形处理器对第一硬件共享内存中待渲染图像数据进行渲染,将渲染后图像数据传递到第二硬件共享内存;通过所述中央处理器从所述第二硬件共享内存中获取渲染后图像数据;其中,所述中央处理器与所述图形处理器具备所述第一硬件共享内存与所述第二硬件共享内存的访问权限。采用本公开实施例的技术方案,采用共享内存的方式实现了CPU与GPU间图像数据的快速交互,降低了整个渲染链路的耗时,提高了帧率,
图像审核方法、装置、电子设备以及存储介质.pdf
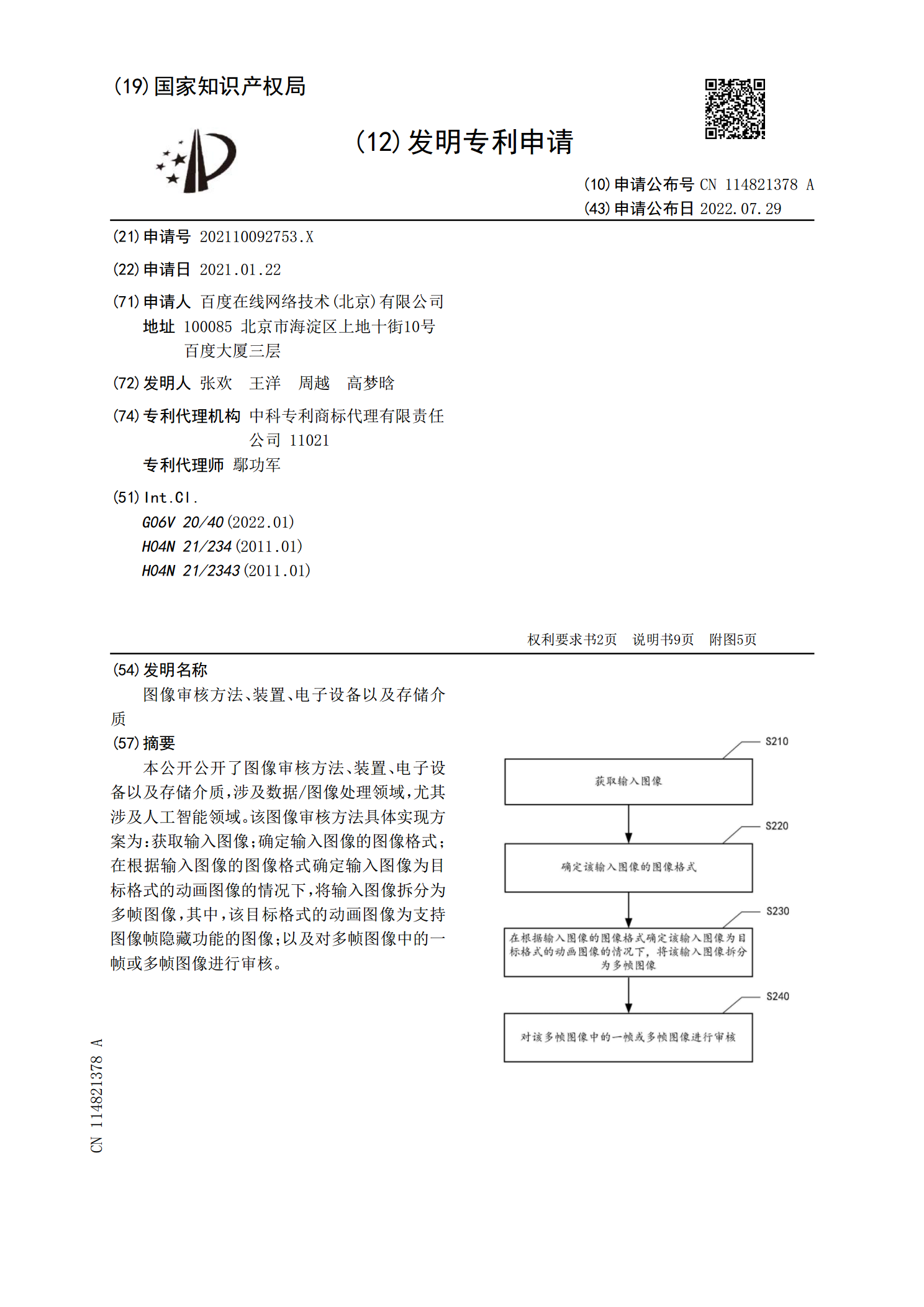
本公开公开了图像审核方法、装置、电子设备以及存储介质,涉及数据/图像处理领域,尤其涉及人工智能领域。该图像审核方法具体实现方案为:获取输入图像;确定输入图像的图像格式;在根据输入图像的图像格式确定输入图像为目标格式的动画图像的情况下,将输入图像拆分为多帧图像,其中,该目标格式的动画图像为支持图像帧隐藏功能的图像;以及对多帧图像中的一帧或多帧图像进行审核。