
一种内控点竖向传递自动划线装置及其划线方法.pdf

莉娜****ua


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种内控点竖向传递自动划线装置及其划线方法.pdf
本发明属于建筑工程施工测量技术领域,具体涉及一种内控点竖向传递自动划线装置及其划线方法,本装置包括激光铅垂仪和自动划线仪;激光铅垂仪架设在多层建筑物的首层建筑层上,且激光铅垂仪的激光光束从下至上依次垂直穿过每层建筑层的预留方孔;自动划线仪布设在预留方孔附近的上层建筑层上,用于在预留方孔四周喷绘出以激光光束的中心点为中心的十字坐标定位线。本方法促进建筑领域智能化应用。本发明克服了在多层建筑施工竖向传递内控法过程中,人工判定激光垂准仪的激光光束中心点所在位置,并在预留方孔四周划出中心定位线的施工测量误差与效率

一种点位划线装置及点位划线方法.pdf
本发明涉及一种点位划线装置和点位划线方法。点位划线装置,在盘形支座的底面外缘设有2个凸块,凸块上设有手柄;在盘形支座的底面中心设有调距螺杆,调距螺杆伸出盘形支座的一端设有手轮,调距螺杆伸入盘形支座的一端与圆锥形的锥形轮固定连接;在盘形支座的侧面设有一组定位机构,定位机构的一端顶在锥形轮的锥面上,另一端伸出盘形支座且端部设有卡盘;在盘形支座的端部通过轴承活动连接转环,在转环的侧面圆周上设有若干组均匀分布的划线机构,划线机构的一端顶在锥形轮的锥面上,另一端伸出转环且端部设有划线笔。本发明结构简单,成本低廉,操
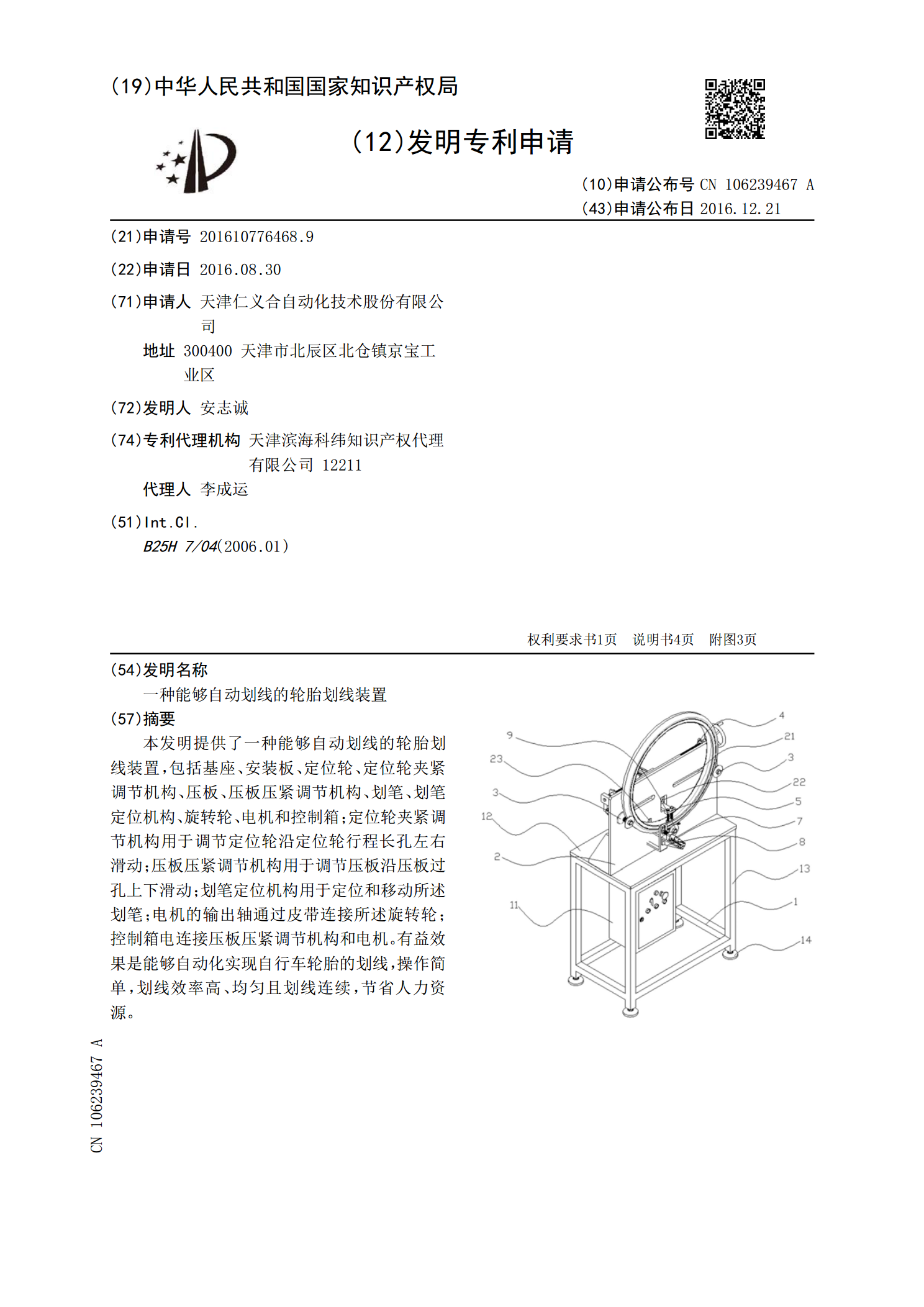
一种能够自动划线的轮胎划线装置.pdf
本发明提供了一种能够自动划线的轮胎划线装置,包括基座、安装板、定位轮、定位轮夹紧调节机构、压板、压板压紧调节机构、划笔、划笔定位机构、旋转轮、电机和控制箱;定位轮夹紧调节机构用于调节定位轮沿定位轮行程长孔左右滑动;压板压紧调节机构用于调节压板沿压板过孔上下滑动;划笔定位机构用于定位和移动所述划笔;电机的输出轴通过皮带连接所述旋转轮;控制箱电连接压板压紧调节机构和电机。有益效果是能够自动化实现自行车轮胎的划线,操作简单,划线效率高、均匀且划线连续,节省人力资源。

用于玻璃面板的划线装置及其划线方法.pdf
本发明公开了一种用于玻璃面板的划线装置及其划线方法。用于玻璃面板的划线装置包括:划线头;划线轮保持件,其安装在划线头中;以及划线轮,其可转动地安装到划线轮保持件的下端部。在划线轮保持件中形成有销孔。销插入经过划线轮的转动轴线。销的相对两端部插入划线轮保持件的销孔内。销的相对两端部的外周表面成曲面状,使得销的相对两端部的横截面直径随着朝销的末端趋近而变小。划线轮在执行划线操作期间相对于玻璃面板的表面的垂直线倾斜。
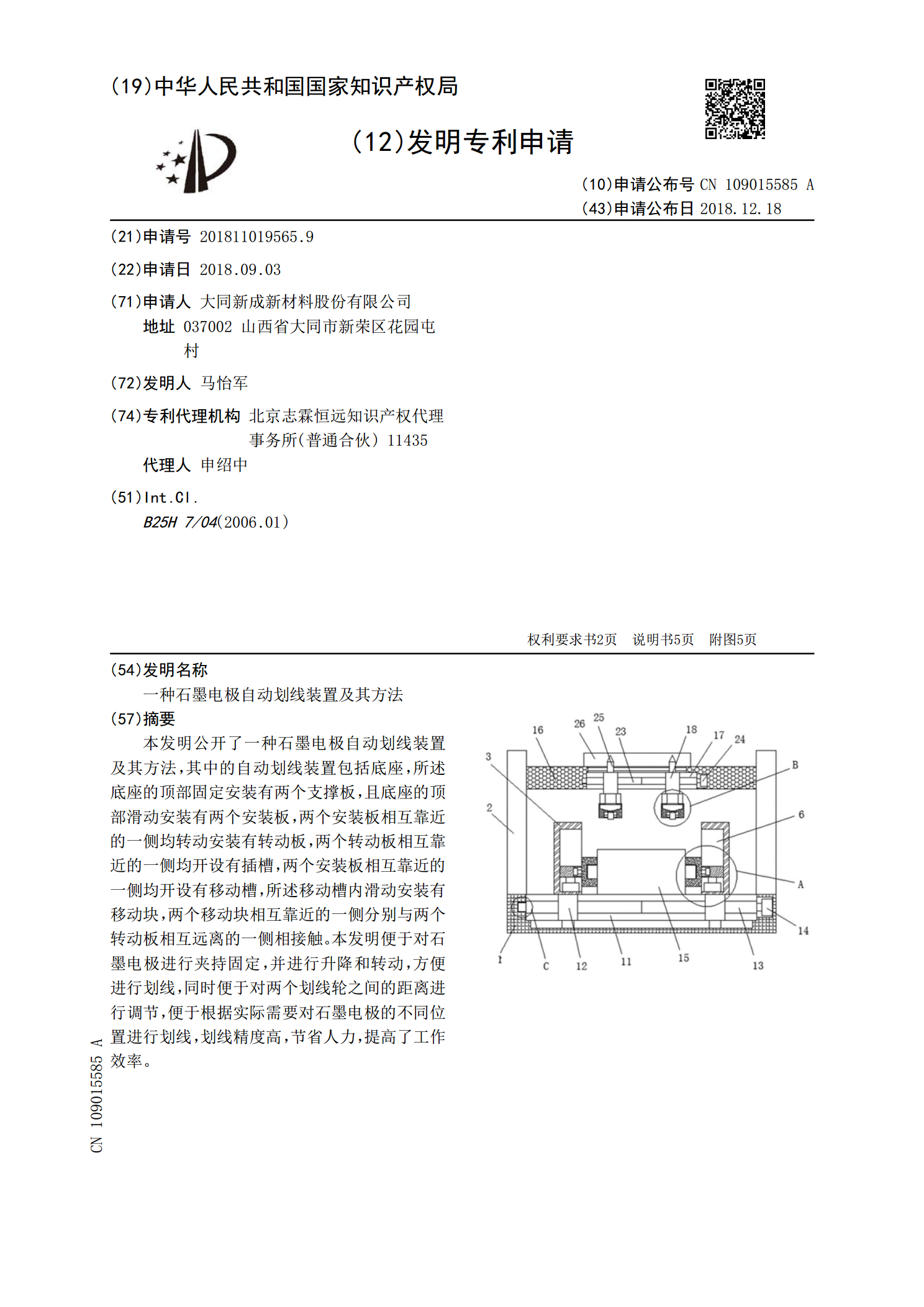
一种石墨电极自动划线装置及其方法.pdf
本发明公开了一种石墨电极自动划线装置及其方法,其中的自动划线装置包括底座,所述底座的顶部固定安装有两个支撑板,且底座的顶部滑动安装有两个安装板,两个安装板相互靠近的一侧均转动安装有转动板,两个转动板相互靠近的一侧均开设有插槽,两个安装板相互靠近的一侧均开设有移动槽,所述移动槽内滑动安装有移动块,两个移动块相互靠近的一侧分别与两个转动板相互远离的一侧相接触。本发明便于对石墨电极进行夹持固定,并进行升降和转动,方便进行划线,同时便于对两个划线轮之间的距离进行调节,便于根据实际需要对石墨电极的不同位置进行划线,