
停车数据确定方法、装置、电子设备及存储介质.pdf

一条****丹淑


1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

停车数据确定方法、装置、电子设备及存储介质.pdf
本发明公开了一种停车数据确定方法、装置、电子设备及存储介质。一种停车数据确定方法,包括:获取车辆轨迹数据,所述车辆轨迹数据包括采样点的时间数据和位置数据;根据所述车辆轨迹数据和设定速度阈值确定所述采样点中的停车轨迹点;对所述停车轨迹点进行聚合,得到第一点群以及所述第一点群的停车数据;根据所述第一点群的停车数据和设定距离阈值对所述第一点群进行聚合得到第二点群,并确定所述第二点群的停车数据;其中,所述停车数据包括停车时间、停留时长和停车位置。利用上述方法,通过获取车辆轨迹数据,并对其分析和处理得到包含时间维度
数据确定方法、装置、存储介质及电子设备.pdf
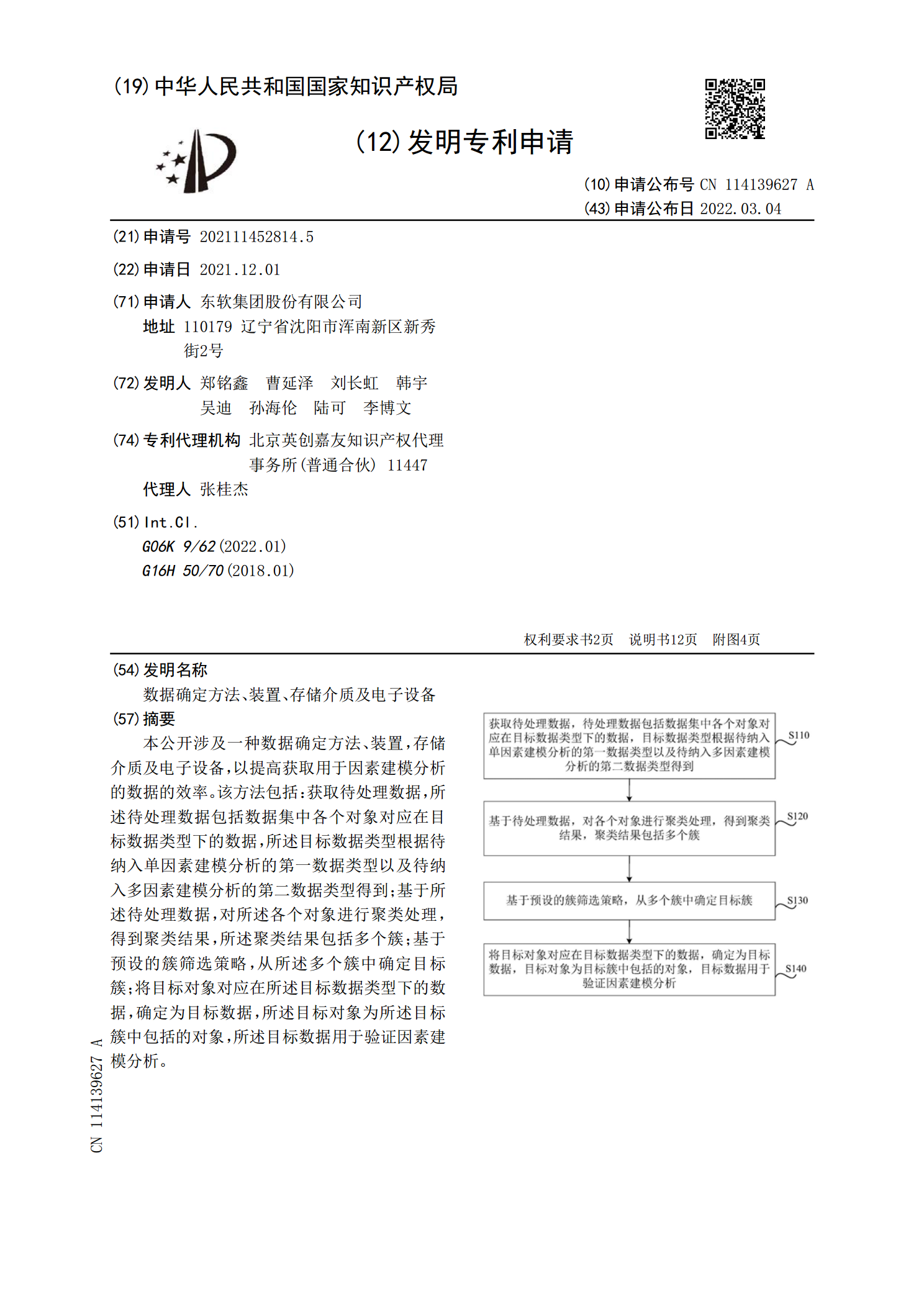
本公开涉及一种数据确定方法、装置,存储介质及电子设备,以提高获取用于因素建模分析的数据的效率。该方法包括:获取待处理数据,所述待处理数据包括数据集中各个对象对应在目标数据类型下的数据,所述目标数据类型根据待纳入单因素建模分析的第一数据类型以及待纳入多因素建模分析的第二数据类型得到;基于所述待处理数据,对所述各个对象进行聚类处理,得到聚类结果,所述聚类结果包括多个簇;基于预设的簇筛选策略,从所述多个簇中确定目标簇;将目标对象对应在所述目标数据类型下的数据,确定为目标数据,所述目标对象为所述目标簇中包括的对象
停车位确定方法、装置、电子设备及存储介质.pdf
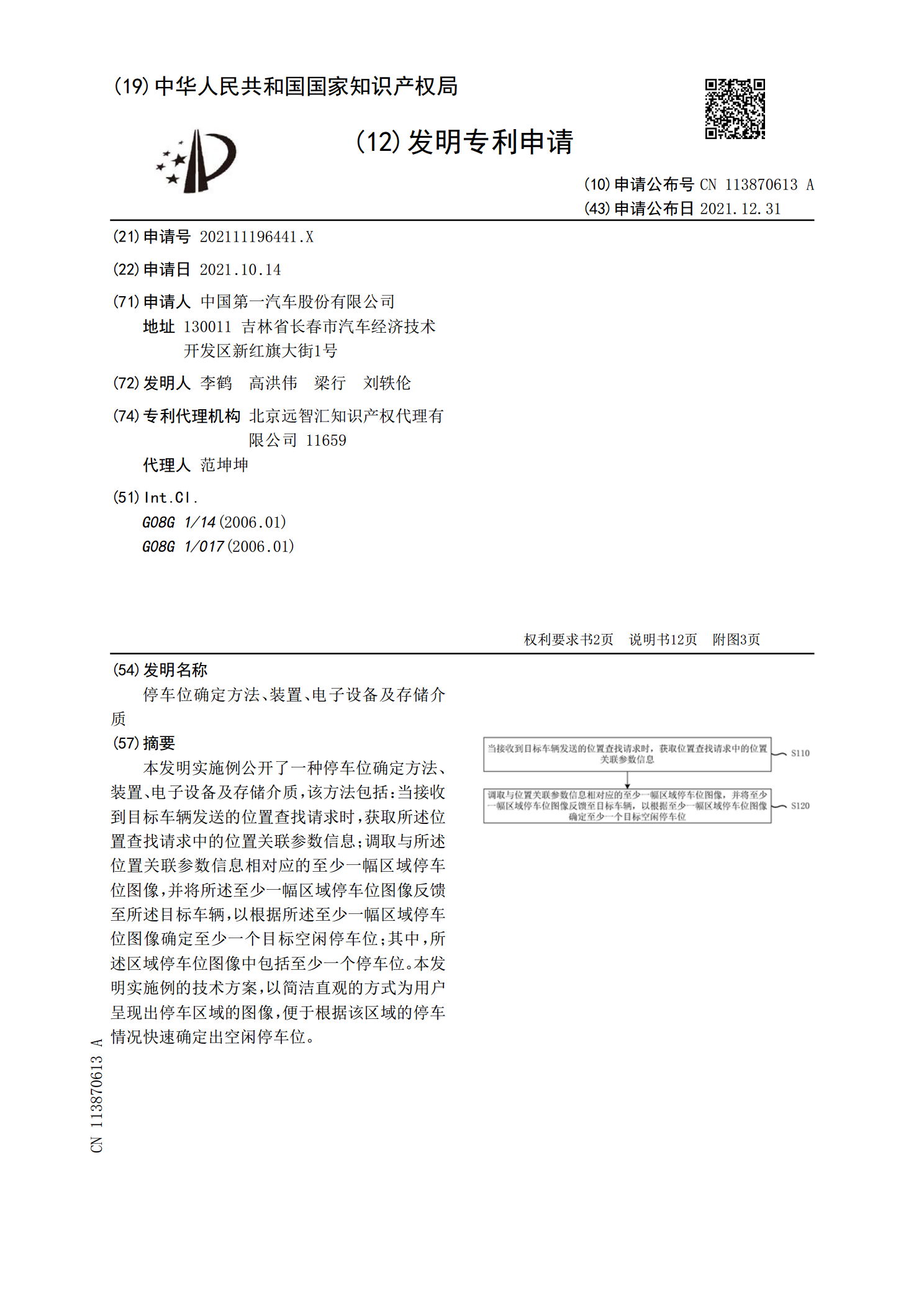
本发明实施例公开了一种停车位确定方法、装置、电子设备及存储介质,该方法包括:当接收到目标车辆发送的位置查找请求时,获取所述位置查找请求中的位置关联参数信息;调取与所述位置关联参数信息相对应的至少一幅区域停车位图像,并将所述至少一幅区域停车位图像反馈至所述目标车辆,以根据所述至少一幅区域停车位图像确定至少一个目标空闲停车位;其中,所述区域停车位图像中包括至少一个停车位。本发明实施例的技术方案,以简洁直观的方式为用户呈现出停车区域的图像,便于根据该区域的停车情况快速确定出空闲停车位。
数据确定方法、装置、电子设备及存储介质.pdf
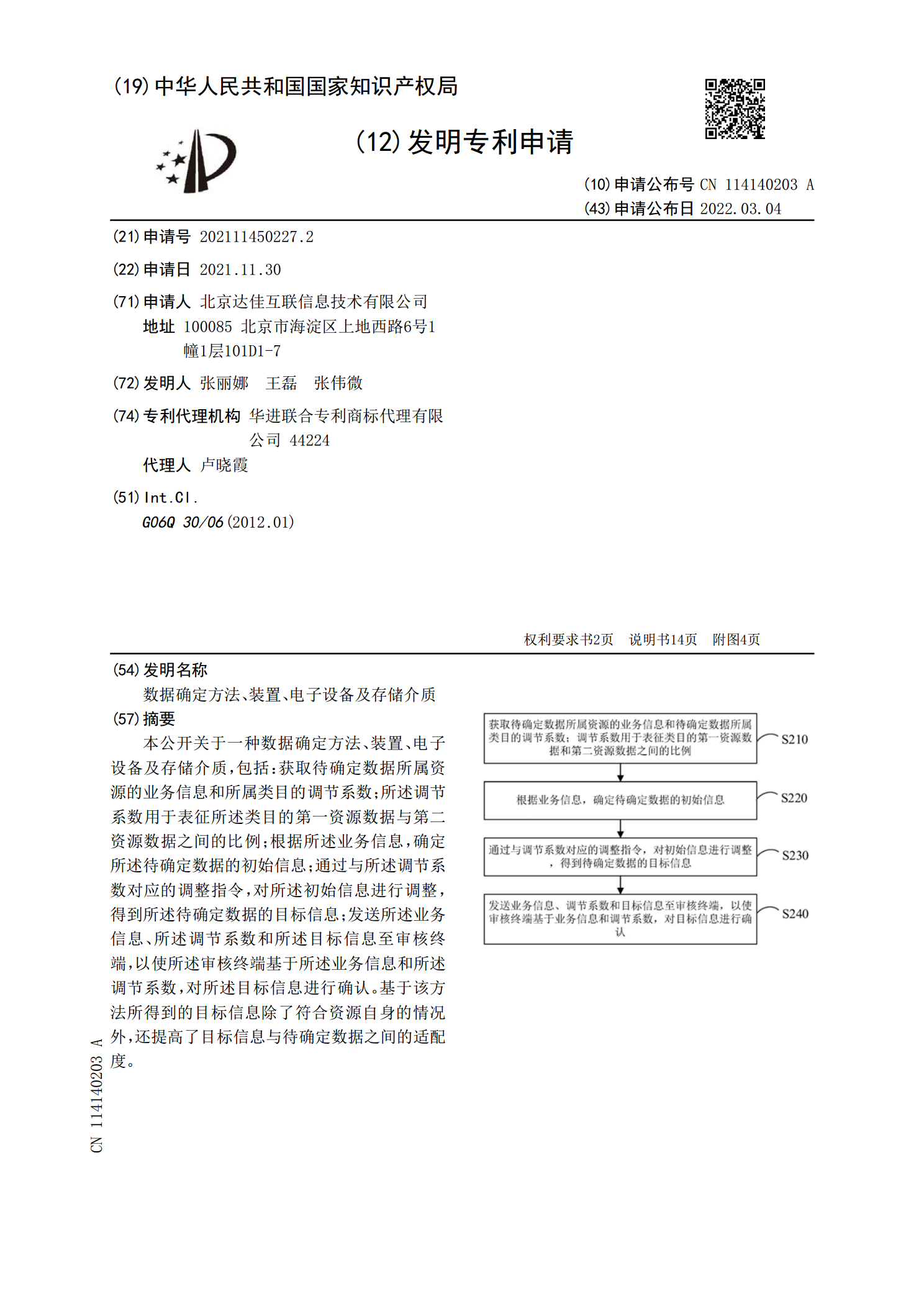
本公开关于一种数据确定方法、装置、电子设备及存储介质,包括:获取待确定数据所属资源的业务信息和所属类目的调节系数;所述调节系数用于表征所述类目的第一资源数据与第二资源数据之间的比例;根据所述业务信息,确定所述待确定数据的初始信息;通过与所述调节系数对应的调整指令,对所述初始信息进行调整,得到所述待确定数据的目标信息;发送所述业务信息、所述调节系数和所述目标信息至审核终端,以使所述审核终端基于所述业务信息和所述调节系数,对所述目标信息进行确认。基于该方法所得到的目标信息除了符合资源自身的情况外,还提高了目标

数据确定方法、装置、电子设备及存储介质.pdf
本公开关于一种数据确定方法、装置、电子设备及存储介质,其中方法通过获取各排序队列中每个初始搜索结果的转化特征,并根据转化特征确定各排序队列中的候选区间,进而基于决策算法从各候选区间对应的候选搜索结果中确定目标搜索结果,得到对应的目标搜索结果队列。由于本实施例是基于决策算法从各候选区间对应的候选搜索结果中确定目标搜索结果,以得到对应的目标搜索结果队列,从而实现通过在线决策的方式来解决集成排序问题,不仅不依赖于候选搜索结果位于原队列的分数,且能够达到较好的效果。