
低速大转矩永磁同步电机二自由度PI控制方法.pdf

一吃****永贺


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

低速大转矩永磁同步电机二自由度PI控制方法.pdf
本发明公开了一种低速大转矩永磁同步电机二自由度PI控制方法,包括以下步骤:对速度环采用传统PI控制器进行改进,构成二自由度PI速度控制器,可以有效减小转速的超调量,提高转速的跟随性能,系统的抗扰动性能也可以得到提高。针对负载转矩、电机参数变化和未建模动态误差扰动因素对系统性能的影响,将它们作为总扰动,利用扩张状态观测器进行观测并进行前馈补偿,由此构成基于扩张状态观测器的二自由度PI控制方法。不仅保留了二自由度PI控制器能够同时兼顾转速跟随性能和系统抗扰动性能的优点,还能够有效地观测出负载转矩突变、电机参数
永磁同步电机转矩控制方法.pdf
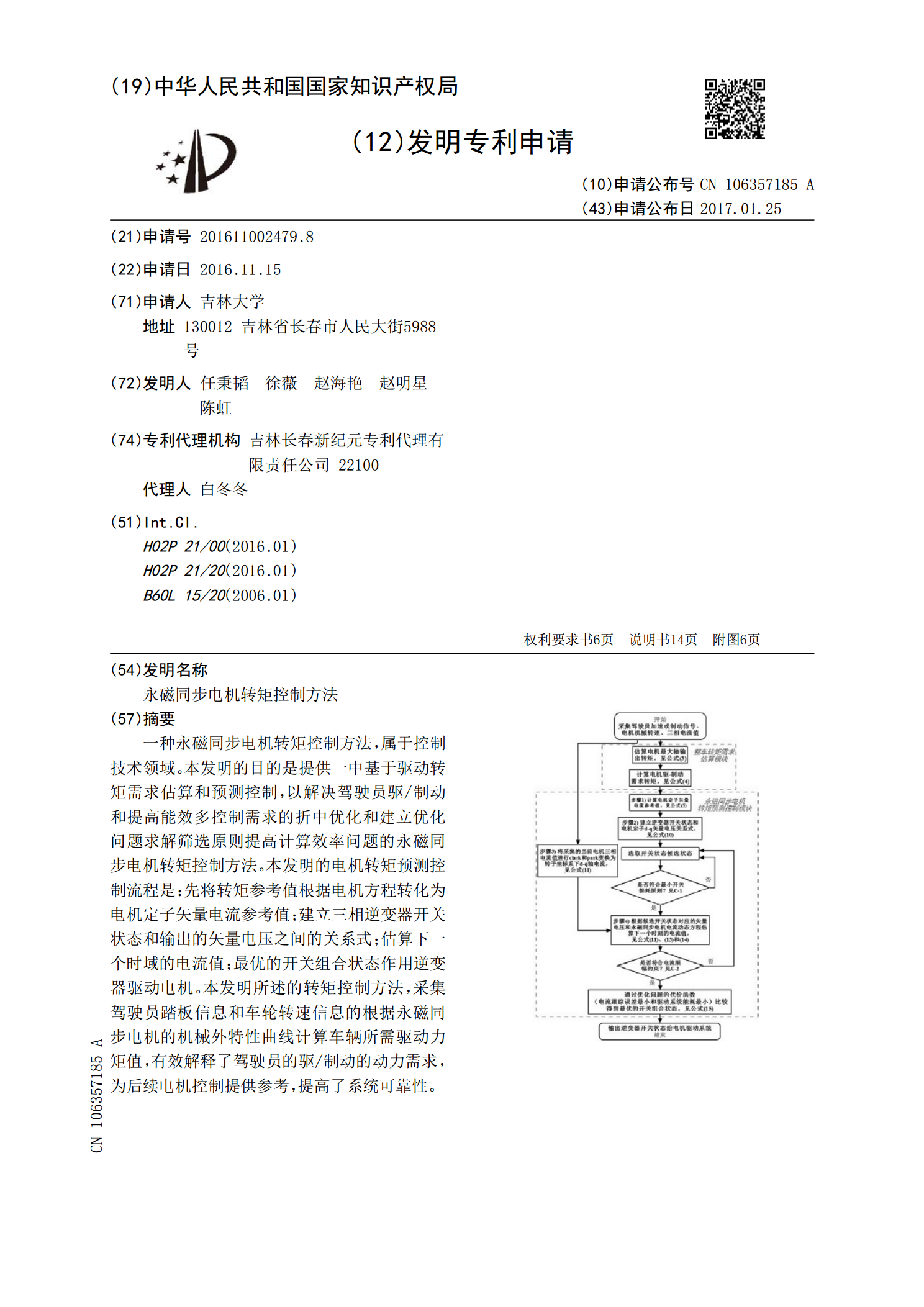
一种永磁同步电机转矩控制方法,属于控制技术领域。本发明的目的是提供一中基于驱动转矩需求估算和预测控制,以解决驾驶员驱/制动和提高能效多控制需求的折中优化和建立优化问题求解筛选原则提高计算效率问题的永磁同步电机转矩控制方法。本发明的电机转矩预测控制流程是:先将转矩参考值根据电机方程转化为电机定子矢量电流参考值;建立三相逆变器开关状态和输出的矢量电压之间的关系式;估算下一个时域的电流值;最优的开关组合状态作用逆变器驱动电机。本发明所述的转矩控制方法,采集驾驶员踏板信息和车轮转速信息的根据永磁同步电机的机械外特

基于参数检测的永磁同步电机转矩PI调控方法.pdf
本发明公开了一种基于参数检测的永磁同步电机转矩PI调控方法,属永磁同步电机控制领域。该控制方法使用的系统由控制器、第一功率驱动单元、永磁同步电机、转矩传感器、定子电压控制单元、第二功率驱动单元、测温装置以及记录仪器,其中控制器由比较器、比例器、积分器和加法器组成;本发明的控制方法是:先识别永磁同步电机在不同定子绕组温度下的等效转矩惯量参数Ai,然后调整控制器的比例控制参数Kp和积分控制参数Ki。本发明在调试时,由于PI控制器的参数是根据永磁同步电机参数进行调整的,所以PI控制器参数可以有的放矢进行调整,遏
永磁同步电机模型预测-直接转矩控制方法.pdf
一种永磁同步电机模型预测‑直接转矩控制方法,属于控制技术领域。本发明的目的是利用降维观测器完成对系统中转矩和磁链的准确估计,然后采用模型预测控制算法来设计轮毂电机驱动系统控制器的永磁同步电机模型预测‑直接转矩控制方法。本发明步骤是:选择电机转矩和磁链为状态量,选取使转矩与磁链预测值与期望值误差最小的目标函数,获得控制电机的三相电压完成对PMSM的控制。本发明应用的模型预测控制算法能够有效处理多输入多输出以及多约束的优化控制问题,取替了传统直接转矩控制中滞环比较器和开关选择模块,避免了滞环的上下限脉动和不必

提高永磁同步电机的转矩的方法.pdf
提高永磁同步电机的转矩,是电机领域中一个备受关注的课题。永磁同步电机因其具有高效、高功率密度和无需外部激励等优点,被广泛应用于电动汽车、风力发电和工业驱动等领域。然而,永磁同步电机在一些特定工况下可能无法满足转矩需求,因此提高其转矩成为了电机工程师和研究人员们的重要课题。本文将通过分析永磁同步电机的转矩产生原理,总结提高永磁同步电机转矩的方法和技术,帮助读者更加深入地了解永磁同步电机转矩提高的相关知识。一、永磁同步电机的转矩产生原理永磁同步电机是一种利用永磁体产生恒定磁场的电机,其转矩产生原理可以通过洛伦