
基于多尺度距离图与点云语义分割的园林地图构建方法.pdf

是笛****加盟


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多尺度距离图与点云语义分割的园林地图构建方法.pdf
本发明提供了一种基于多尺度距离图与点云语义分割的园林地图构建方法,先定义园林环境中的动/静物体,使用卷积神经网络对扫描到的物体投影到距离图上提取语义信息,并对含有语义标签的距离图进行图形学闭运算处理优化动态区域,然后使用语义信息通过权值调整细化动/静区域检测敏感度,采用检查投影距离图像平面内地图点的可见性完成动静点的分类任务,最后在多个尺度距离图下实现点云的去除与恢复任务,完成静态地图的构建与优化。本发明的园林地图构建方法,改善了传统方法对静态物体误删、错删的概率,提高地图复用时点云配准精度,更能在园林环

基于多尺度特征融合的三维点云语义分割方法.pdf
本发明公开了一种基于多尺度特征融合的三维点云语义分割方法。针对现有方法中单一编码器存在的感受野受限、难以适应不同类别预测的问题,本发明在网络编码器部分引入多支具有不同感受野的子编码器用于编码不同尺度的特征,为了在保证子编码器感受野大小的同时减少计算量和显存占用,本发明使用空洞卷积提取点云特征。相比于已有的基于深度学习框架的三维点云语义分割方法,本发明方法更好的保留了属于点云集合的不同尺度的高维特征,因此可以适应不同尺度的地物的预测,实现比已有方法更高的语义分割精度。
基于多视角图结构特征注意力卷积的点云语义分割方法.pdf
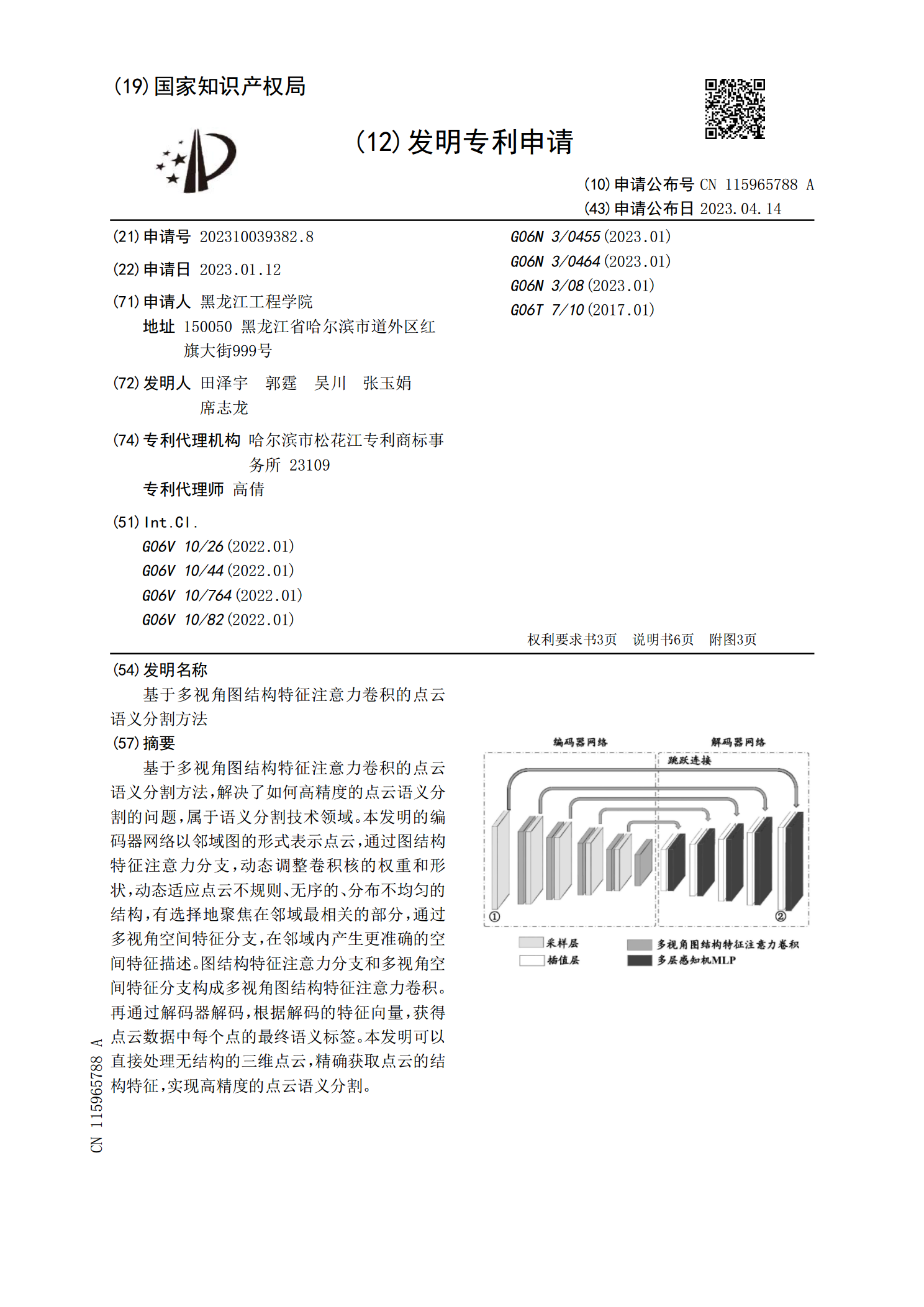
基于多视角图结构特征注意力卷积的点云语义分割方法,解决了如何高精度的点云语义分割的问题,属于语义分割技术领域。本发明的编码器网络以邻域图的形式表示点云,通过图结构特征注意力分支,动态调整卷积核的权重和形状,动态适应点云不规则、无序的、分布不均匀的结构,有选择地聚焦在邻域最相关的部分,通过多视角空间特征分支,在邻域内产生更准确的空间特征描述。图结构特征注意力分支和多视角空间特征分支构成多视角图结构特征注意力卷积。再通过解码器解码,根据解码的特征向量,获得点云数据中每个点的最终语义标签。本发明可以直接处理无结

一种基于多线激光雷达点云的多尺度静态地图构建方法.pdf
本发明公开了一种基于多线激光雷达点云的多尺度静态地图构建方法,利用多线激光雷达获取道路行驶数据输出每一帧的带有时间戳的激光点云,在工控机下通过三维激光SLAM输出每帧的姿态数据。动态目标去除系统按照时间戳读入用户指定范围内的激光点云帧。建立多尺度下的图像金字塔,迭代金字塔的每一层图像。针对每一层图像,将局部坐标系下的每一帧关键帧三维点云与原始地图按照指定尺度分别投影至二维图像。标记为动态点的点云子集作为图像金字塔下一次迭代的全部点云,循环往复,直至遍历图像金子塔的全部尺度,将动态点的错误识别率降至最低,从
一种基于超点图的大规模点云语义分割方法.pdf
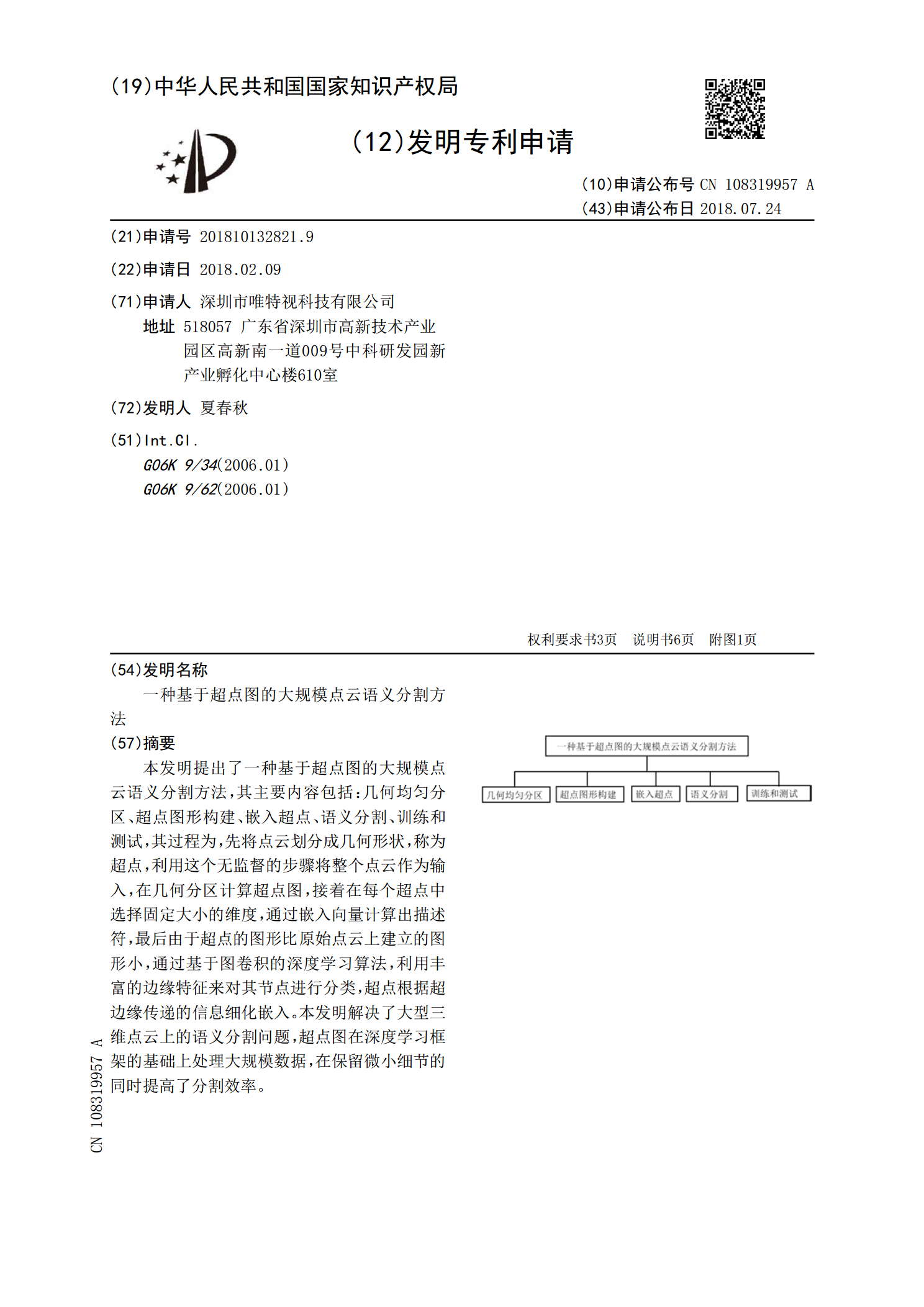
本发明提出了一种基于超点图的大规模点云语义分割方法,其主要内容包括:几何均匀分区、超点图形构建、嵌入超点、语义分割、训练和测试,其过程为,先将点云划分成几何形状,称为超点,利用这个无监督的步骤将整个点云作为输入,在几何分区计算超点图,接着在每个超点中选择固定大小的维度,通过嵌入向量计算出描述符,最后由于超点的图形比原始点云上建立的图形小,通过基于图卷积的深度学习算法,利用丰富的边缘特征来对其节点进行分类,超点根据超边缘传递的信息细化嵌入。本发明解决了大型三维点云上的语义分割问题,超点图在深度学习框架的基础