
基于图像处理的表面缺陷检测仪的图像增强方法及系统.pdf

骊蓉****23


1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于图像处理的表面缺陷检测仪的图像增强方法及系统.pdf
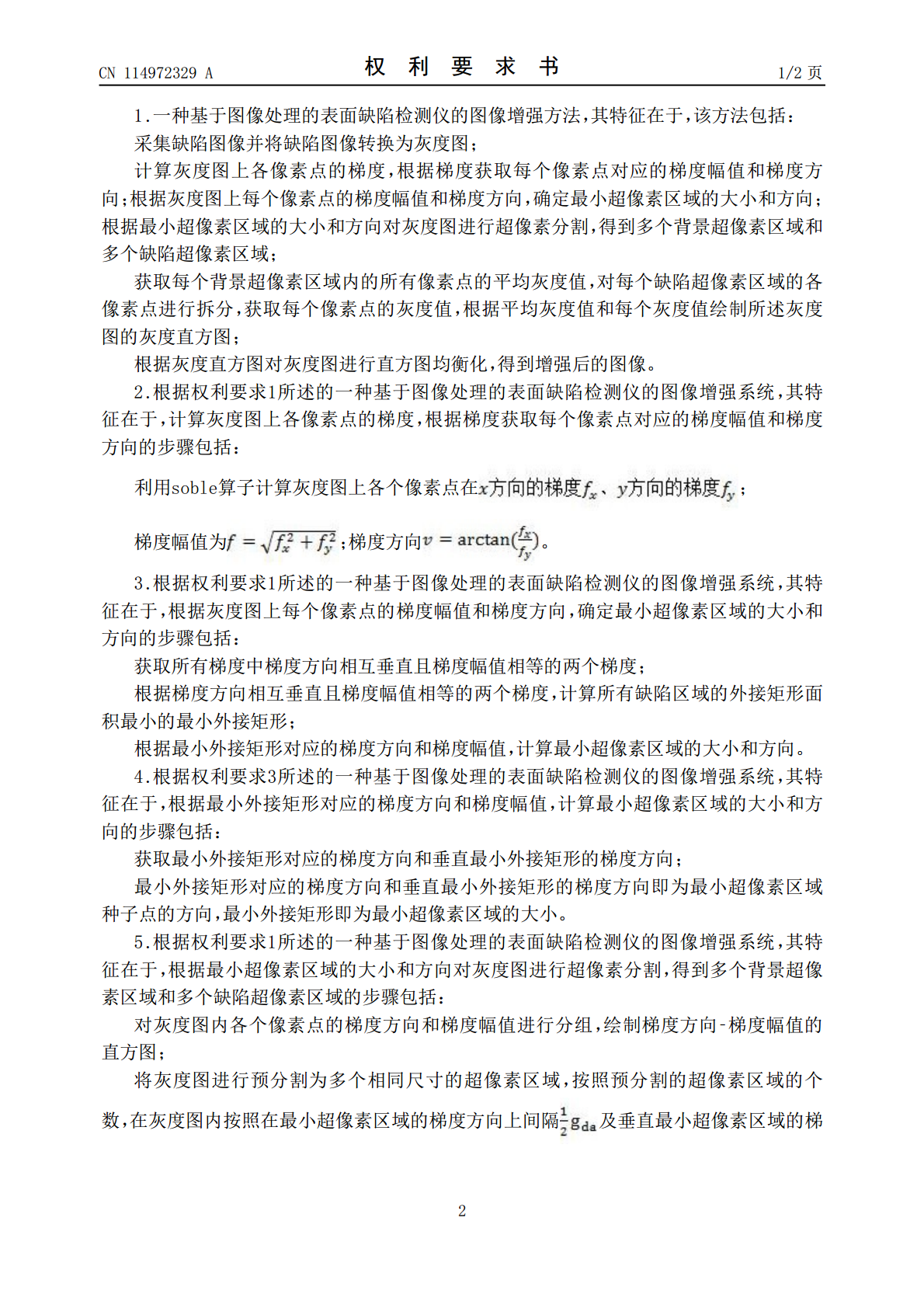
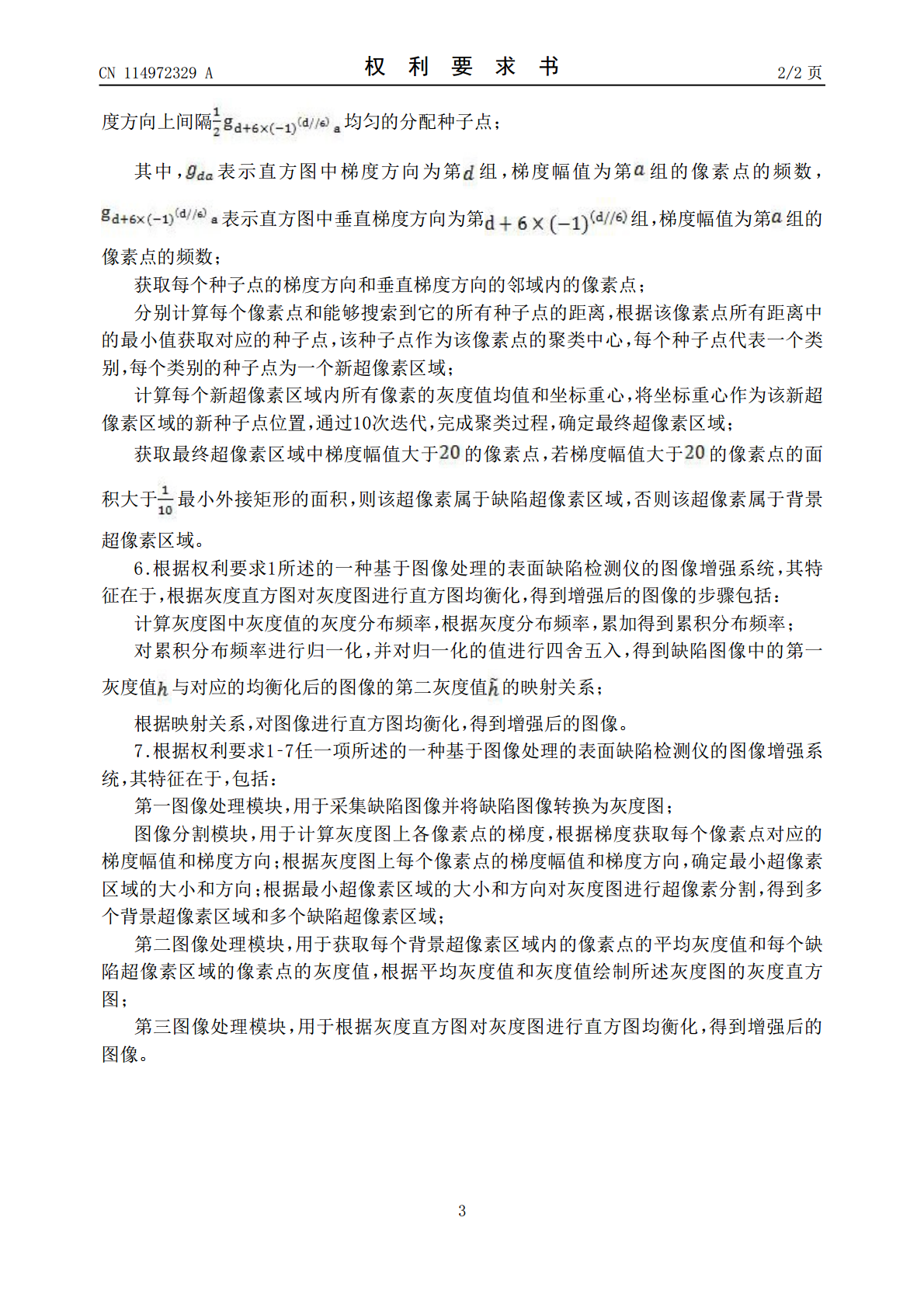
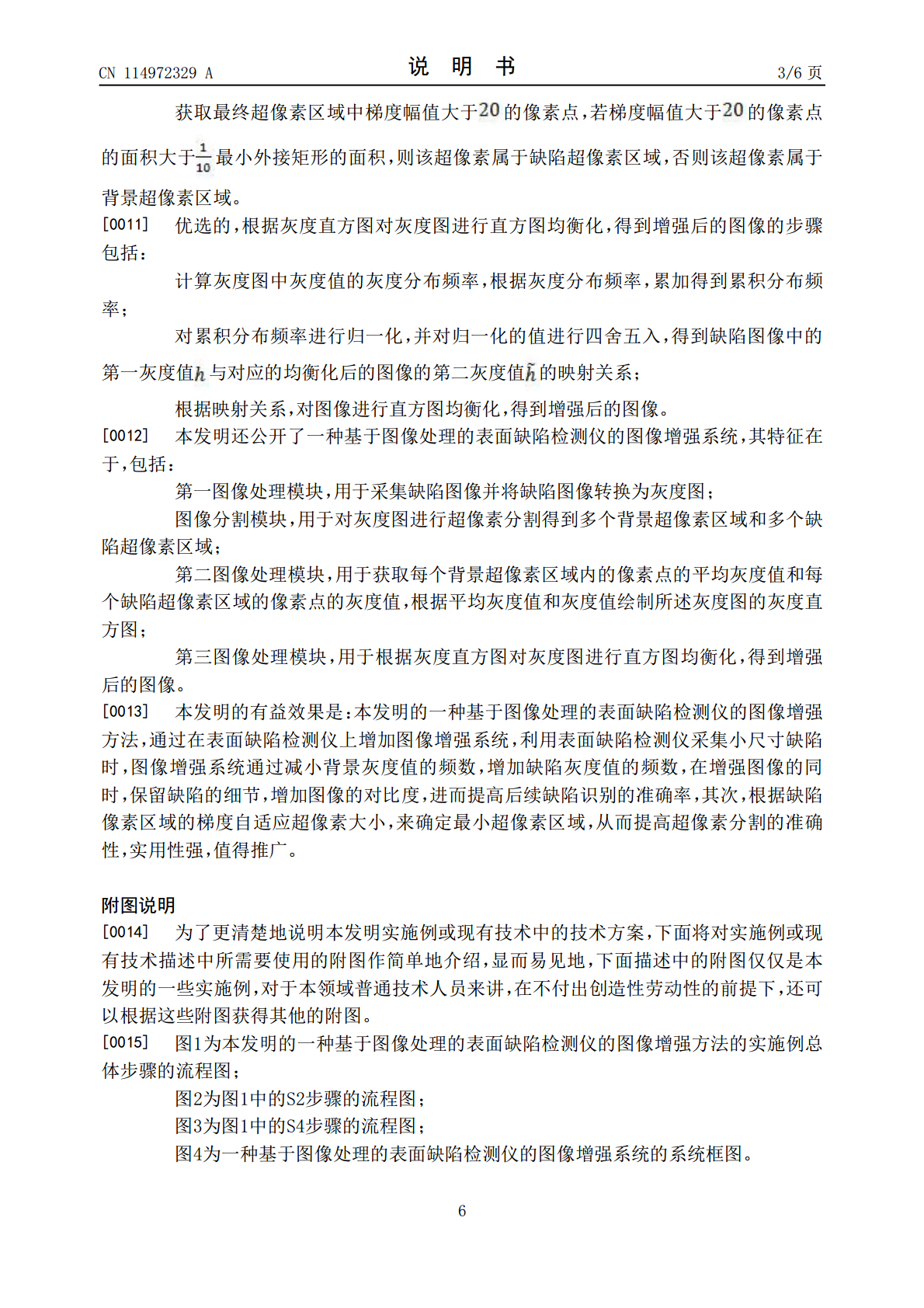
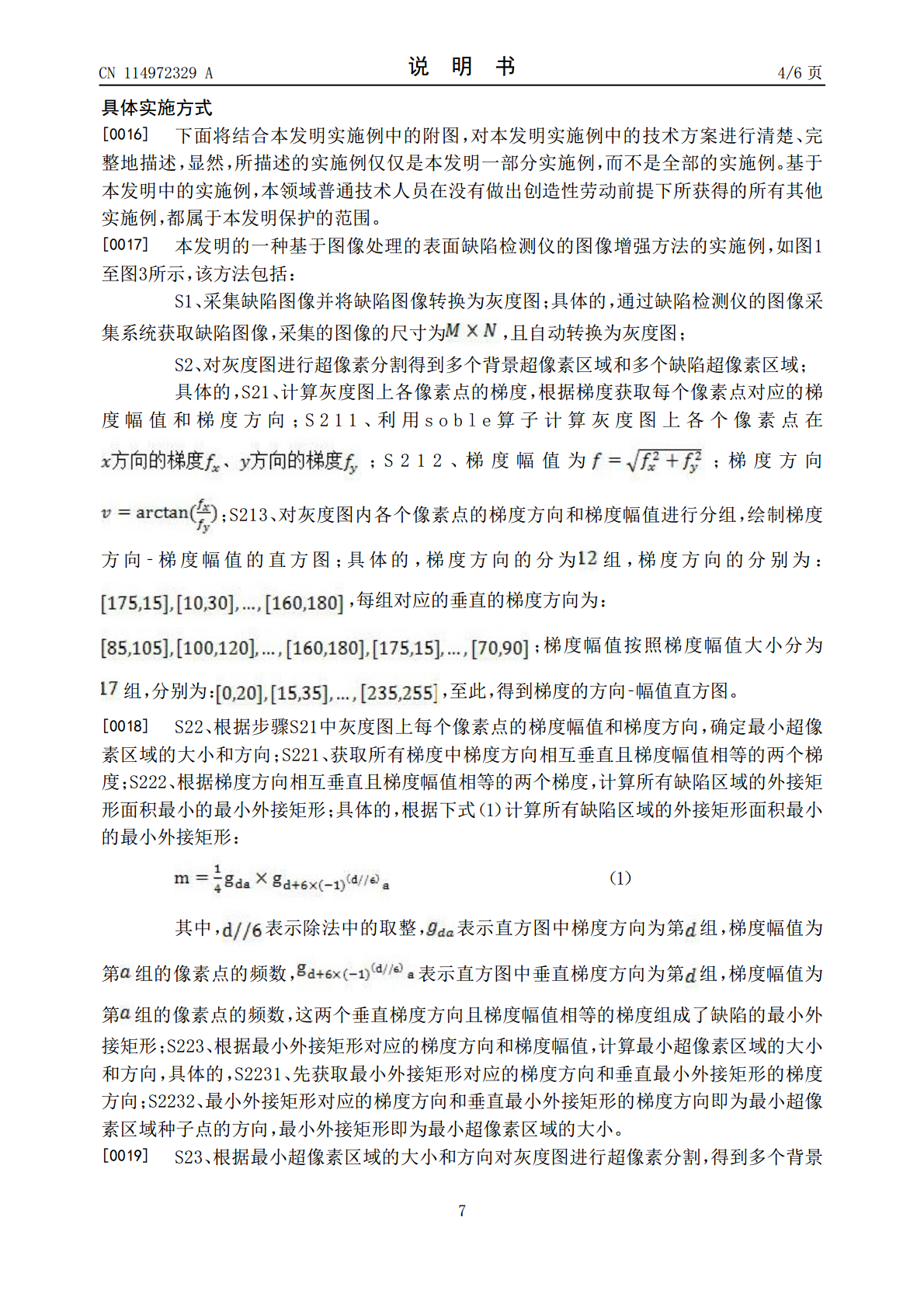
本发明涉及基于图像处理的表面缺陷检测仪的图像增强方法和系统,其包括:采集缺陷图像并将缺陷图像转换为灰度图;对灰度图进行超像素分割得到多个背景超像素区域和多个缺陷超像素区域;获取每个背景超像素区域内的像素点的平均灰度值和每个缺陷超像素区域的像素点的灰度值,根据平均灰度值和灰度值绘制灰度图的灰度直方图;根据灰度直方图对灰度图进行直方图均衡化,得到增强后的图像,本发明的方法通过减小背景灰度值的频数,增加缺陷灰度值的频数,在增强图像的同时,保留缺陷的细节,增加图像的对比度,进而提高缺陷识别的准确率,实用性强,值得

基于改进Retinex的钢轨表面缺陷图像增强方法.docx
基于改进Retinex的钢轨表面缺陷图像增强方法摘要本文提出一种改进Retinex的钢轨表面缺陷图像增强方法。该方法针对钢轨表面缺陷的特点,采用将图像分解为多个频带的方法提取图像的细节信息,并结合了调整幂次变换和直方图均衡化方法进行增强处理,最后再将图像进行逆分解得到增强后的图像。实验证明,该方法不仅能够增强钢轨表面缺陷图像的细节信息,还能够有效提高钢轨表面缺陷的检测率和准确度,具有很好的应用前景。关键词:Retinex;钢轨表面缺陷;图像增强;缺陷检测一、介绍钢轨是铁路运输中非常重要的基础设施之一,其质
基于图像处理的注塑件表面缺陷检测方法.pdf
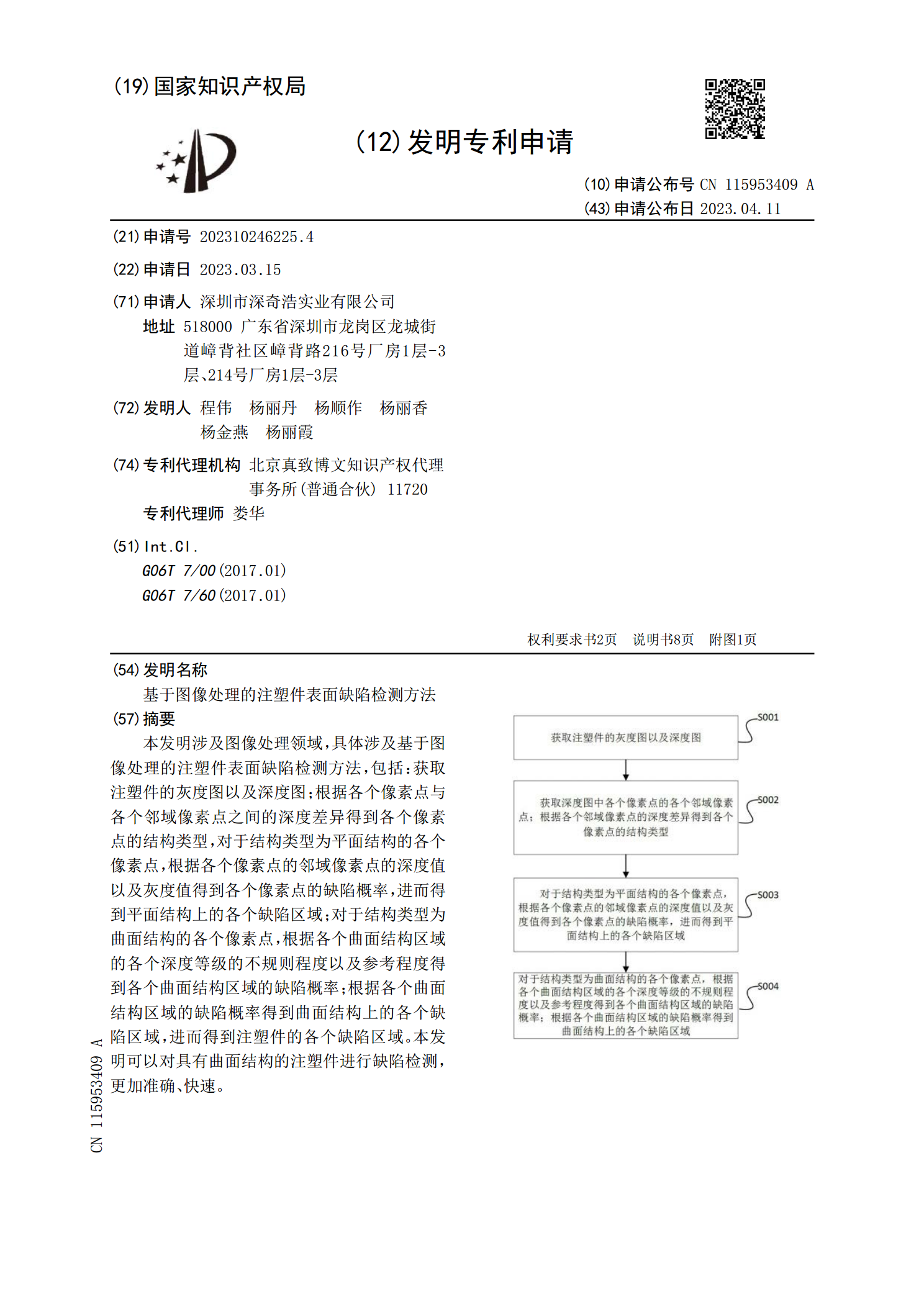
本发明涉及图像处理领域,具体涉及基于图像处理的注塑件表面缺陷检测方法,包括:获取注塑件的灰度图以及深度图;根据各个像素点与各个邻域像素点之间的深度差异得到各个像素点的结构类型,对于结构类型为平面结构的各个像素点,根据各个像素点的邻域像素点的深度值以及灰度值得到各个像素点的缺陷概率,进而得到平面结构上的各个缺陷区域;对于结构类型为曲面结构的各个像素点,根据各个曲面结构区域的各个深度等级的不规则程度以及参考程度得到各个曲面结构区域的缺陷概率;根据各个曲面结构区域的缺陷概率得到曲面结构上的各个缺陷区域,进而得到

基于图像增强与深度学习的钢轨表面缺陷检测.docx
基于图像增强与深度学习的钢轨表面缺陷检测基于图像增强与深度学习的钢轨表面缺陷检测摘要:钢轨表面缺陷的快速检测对于确保铁路交通的安全至关重要。本文提出了一种基于图像增强与深度学习的钢轨表面缺陷检测方法。首先,利用图像增强技术对钢轨图像进行预处理,以提高缺陷的可见性。然后,利用深度学习模型对增强后的图像进行分类和定位,以实现对钢轨表面缺陷的准确检测。实验结果表明,所提出的方法在钢轨表面缺陷检测方面取得了很高的准确率和鲁棒性。关键词:钢轨表面缺陷检测,图像增强,深度学习,准确率,鲁棒性。1.引言钢轨表面缺陷是影

基于图像处理的钢轨表面缺陷识别研究.docx
基于图像处理的钢轨表面缺陷识别研究基于图像处理的钢轨表面缺陷识别研究摘要:钢轨作为铁路运输系统中重要的组成部分,其表面缺陷的及时检测和识别对于确保铁路运输的安全和可靠性至关重要。本文基于图像处理技术,对钢轨表面缺陷进行了研究。首先,对钢轨图像进行预处理,如去噪、图像增强等。然后,通过分割和特征提取,识别不同类型的表面缺陷。最后,进行缺陷分类和识别,实现自动化的缺陷检测和识别。实验结果表明,该方法能够有效地检测和识别钢轨表面的缺陷,为铁路运输的安全提供了有力的支持。关键词:钢轨,表面缺陷,图像处理,特征提取