
高精度区域定位系统信号处理方法及装置.pdf

是雁****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

高精度区域定位系统信号处理方法及装置.pdf
本申请提出一种高精度区域定位系统信号处理方法及装置。其中方法包括:建立融合高精度区域定位系统及惯性导航系统的状态方程和测量方程;采用扩展卡尔曼滤波实现在线载波相位模糊度解算,得到模糊度浮点解估计和模糊度估计协方差矩阵;根据所述模糊度浮点解和模糊度估计协方差矩阵使用LAMBDA算法搜索载波测量模糊度固定解。本发明保留了实时在线载波相位模糊度解算类算法动态解算、实时运行的优势,而且与现有的实时在线载波相位模糊度解算算法相比,所提算法在初始解误差较大的情况下依然可以求解高精度区域定位系统载波测量模糊。本发明可以

一种室内异常信号高精度定位方法、系统及装置.pdf
本发明提出的一种室内异常信号高精度定位方法、系统及装置,属于无线信号定位技术领域。所述方法包括:在待定位空间内部署信号接收器,并进行区域和网格划分;设置指纹采集点,采集各指纹采集点发出的异常信号的信号强度数据;对采集的信号强度数据进行预处理,生成相应的采集指纹;使用采集指纹训练区域定位模型和网格定位模型;实时获取信号接收器采集的信号强度数据,使用区域定位模型预测异常信号所属的区域位置,根据预测出的区域位置使用网格定位模型预测异常信号的网格位置,并生成异常信号的坐标。本发明使用机器学习算法构建指纹地图数据库
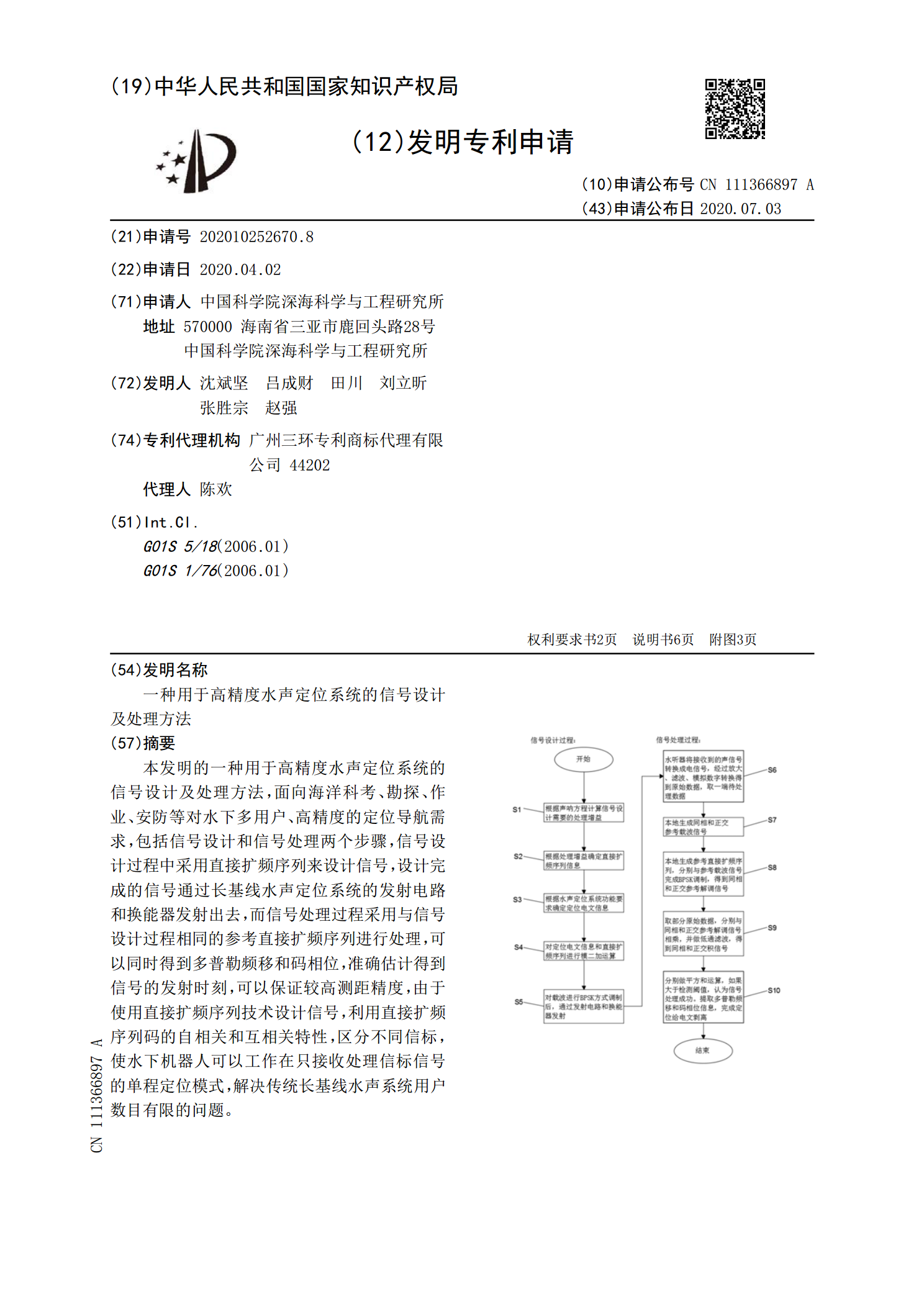
一种用于高精度水声定位系统的信号设计及处理方法.pdf
本发明的一种用于高精度水声定位系统的信号设计及处理方法,面向海洋科考、勘探、作业、安防等对水下多用户、高精度的定位导航需求,包括信号设计和信号处理两个步骤,信号设计过程中采用直接扩频序列来设计信号,设计完成的信号通过长基线水声定位系统的发射电路和换能器发射出去,而信号处理过程采用与信号设计过程相同的参考直接扩频序列进行处理,可以同时得到多普勒频移和码相位,准确估计得到信号的发射时刻,可以保证较高测距精度,由于使用直接扩频序列技术设计信号,利用直接扩频序列码的自相关和互相关特性,区分不同信标,使水下机器人可
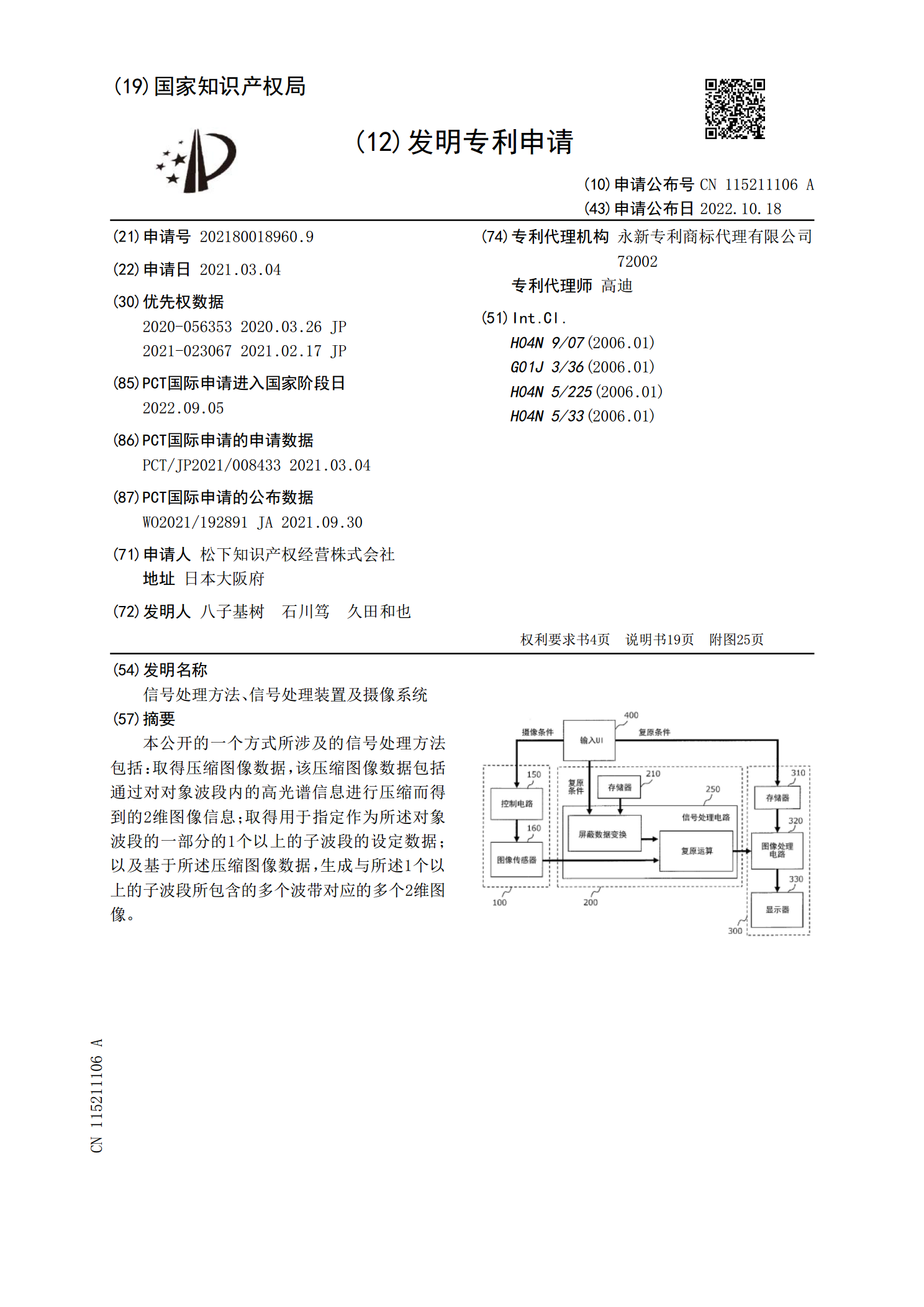
信号处理方法、信号处理装置及摄像系统.pdf
本公开的一个方式所涉及的信号处理方法包括:取得压缩图像数据,该压缩图像数据包括通过对对象波段内的高光谱信息进行压缩而得到的2维图像信息;取得用于指定作为所述对象波段的一部分的1个以上的子波段的设定数据;以及基于所述压缩图像数据,生成与所述1个以上的子波段所包含的多个波带对应的多个2维图像。
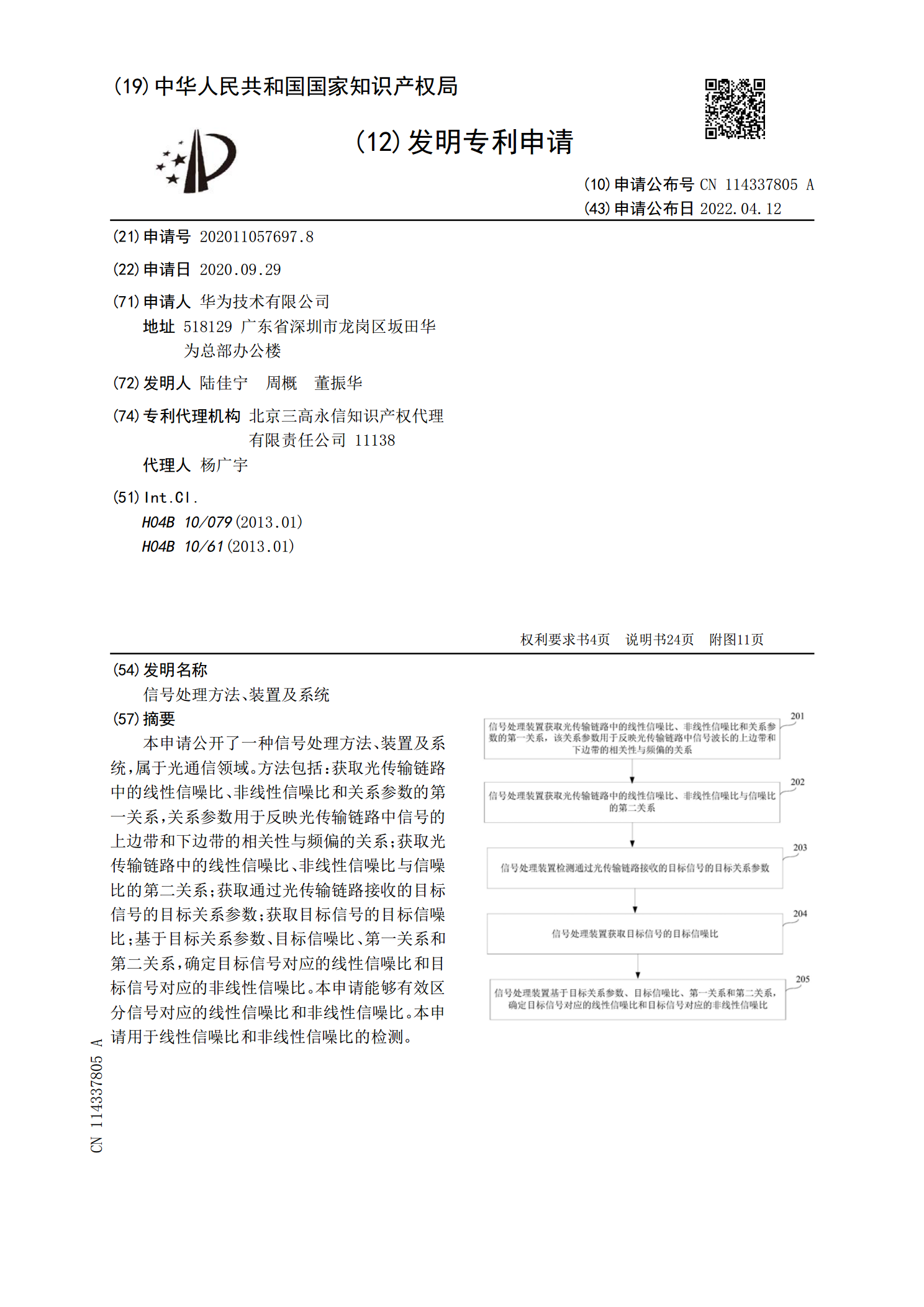
信号处理方法、装置及系统.pdf
本申请公开了一种信号处理方法、装置及系统,属于光通信领域。方法包括:获取光传输链路中的线性信噪比、非线性信噪比和关系参数的第一关系,关系参数用于反映光传输链路中信号的上边带和下边带的相关性与频偏的关系;获取光传输链路中的线性信噪比、非线性信噪比与信噪比的第二关系;获取通过光传输链路接收的目标信号的目标关系参数;获取目标信号的目标信噪比;基于目标关系参数、目标信噪比、第一关系和第二关系,确定目标信号对应的线性信噪比和目标信号对应的非线性信噪比。本申请能够有效区分信号对应的线性信噪比和非线性信噪比。本申请用于