
基于微波雷达的索力监测器.pdf

白凡****12

1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于微波雷达的索力监测器.pdf
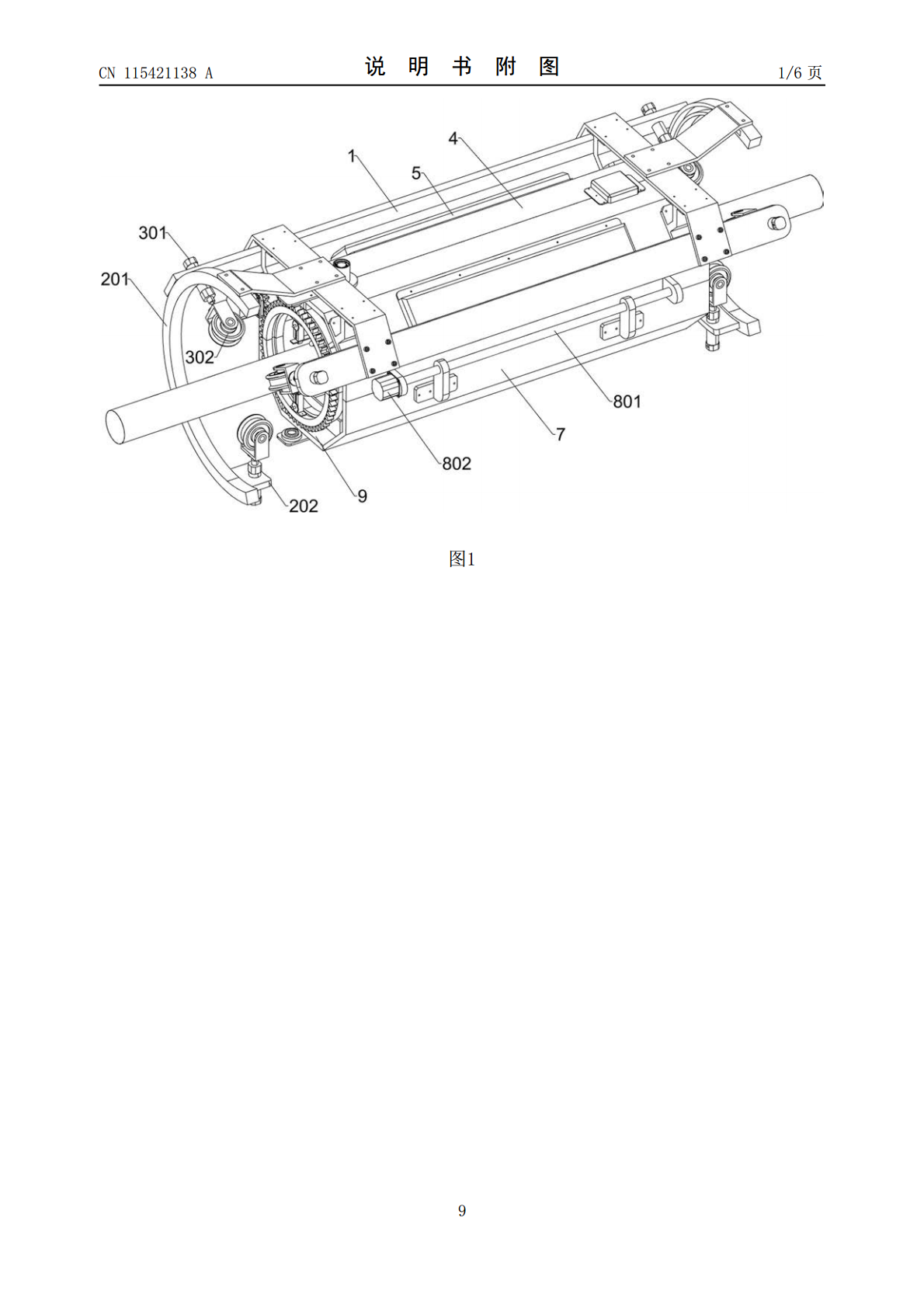
本发明公开了一种基于微波雷达的索力监测器,包括有固定罩,其特征在于:还包括有绳索表面清洁系统等;固定罩左部连接有用于清洁绳索表面腐蚀的绳索表面清洁系统。本发明利用刮除器将拉索上有腐蚀现象的部分进行离散推动,同时利用清扫器将离散下来又还附着在拉索表面的残留物完全地剥离,提高拉索表面性质的单一程度,减小了颗粒振动物对微波雷达发出监测微波的干扰,避免了颗粒临近多分量耦合对微波的干扰,提高了微波雷达对索力的监测准确性。
一种基于微波雷达的桥梁拉索群索力同步监测方法及系统.pdf
本发明公开了一种基于微波雷达的桥梁拉索群索力同步监测方法及系统,该系统主要由微波雷达设备、PC机组成。微波雷达设备内向桥梁拉索群发射微波信号并接收拉索群的反射回波信号,经数据处理机将回波信号换算为拉索群微动时程信号,PC机的显示单元将拉索群微动时程信号显示,时程数据分析单元读取拉索群微动时程信号,经内嵌的融合VMD和时频分析的欠定时程信号盲源分离算法分离测量单元多根索时程信号,应用VMD算法识别拉索群各索的时变索力。本发明提供了一种高效、准确、稳定性高和适应性强的拉索群时变索力测量解决方案,有效解决拉索群

基于微波雷达对基坑钢管支撑轴力监测的装置及方法.pdf
本发明公开了基于微波雷达对基坑钢管支撑轴力监测的装置及方法,方法包括通过向钢管支撑发射微波信号并接收钢管支撑反射的回波信号,并将回波信号换算为钢管支撑微动时程信号;经融合EMD和时频分析的欠定时程信号盲源分离算法分离测量单元钢管支撑微动时程信号后,应用EMD算法识别基坑钢管支撑的时变轴力;装置中,微波雷达设备的信号输出端与数据采集模块的信号输入端连接;数据采集模块通过无线远程传输模块与数据处理模块连接;数据处理模块的信号输出端与显示模块的信号输入端连接。本申请一种非接触式测量方法,该方法测量精度高,作用距

基于微波雷达的车型识别算法.docx
基于微波雷达的车型识别算法摘要车辆识别是智能交通系统中的重要环节,对于车辆信息采集、交通流量统计及违规监控等方面具有重要作用。本文采用微波雷达技术,结合机器学习算法,提出一种车型识别的算法模型,并在实验中验证其准确率和鲁棒性,结果表明本文所提算法在车型识别方面能够达到较高的准确率,并具有良好的鲁棒性。关键词:微波雷达、车型识别、机器学习、准确率AbstractVehiclerecognitionisanimportantpartofintelligenttransportationsystems,whic

基于微波雷达的形变监测系统设计.pptx
基于微波雷达的形变监测系统设计目录添加目录项标题系统概述形变监测的重要性微波雷达技术的优势系统设计目标系统工作原理硬件设计微波雷达模块数据采集模块电源模块通信模块软件设计信号处理算法数据采集与传输形变分析算法预警系统设计系统测试与验证测试环境与设备测试方案与步骤测试结果分析系统性能评估应用场景与优势适用场景介绍系统优势分析与传统方法的比较实际应用案例未来发展与改进技术发展趋势系统升级与改进方向未来应用前景展望感谢观看