
一种基于体素滤波的三维点云精简方法.pdf

婀娜****aj


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于体素滤波的三维点云精简方法.pdf
本发明涉及点云处理技术领域,尤其涉及一种基于体素滤波的三维点云精简方法,包括以下步骤:S1、获取原始点云图;S2、通过3D‑SIFT算法提取出原始点云图的强特征点,得到强特点云图;S3、去除原始点云图中的强特征点,得到弱特征点云图;S4、通过改进后的八叉树算法对弱特征点云图进行滤波,用距离重心最近的点代替体素内部的全部点,得到滤波后的弱特征点云图;S5、将滤波后的弱特征点云图与强特征点云图进行合并,得到精简后的点云图。本方法能够在保留特征点的同时对点云进行有效的精简。
一种基于体素点云融合的三维动态目标检测方法及装置.pdf
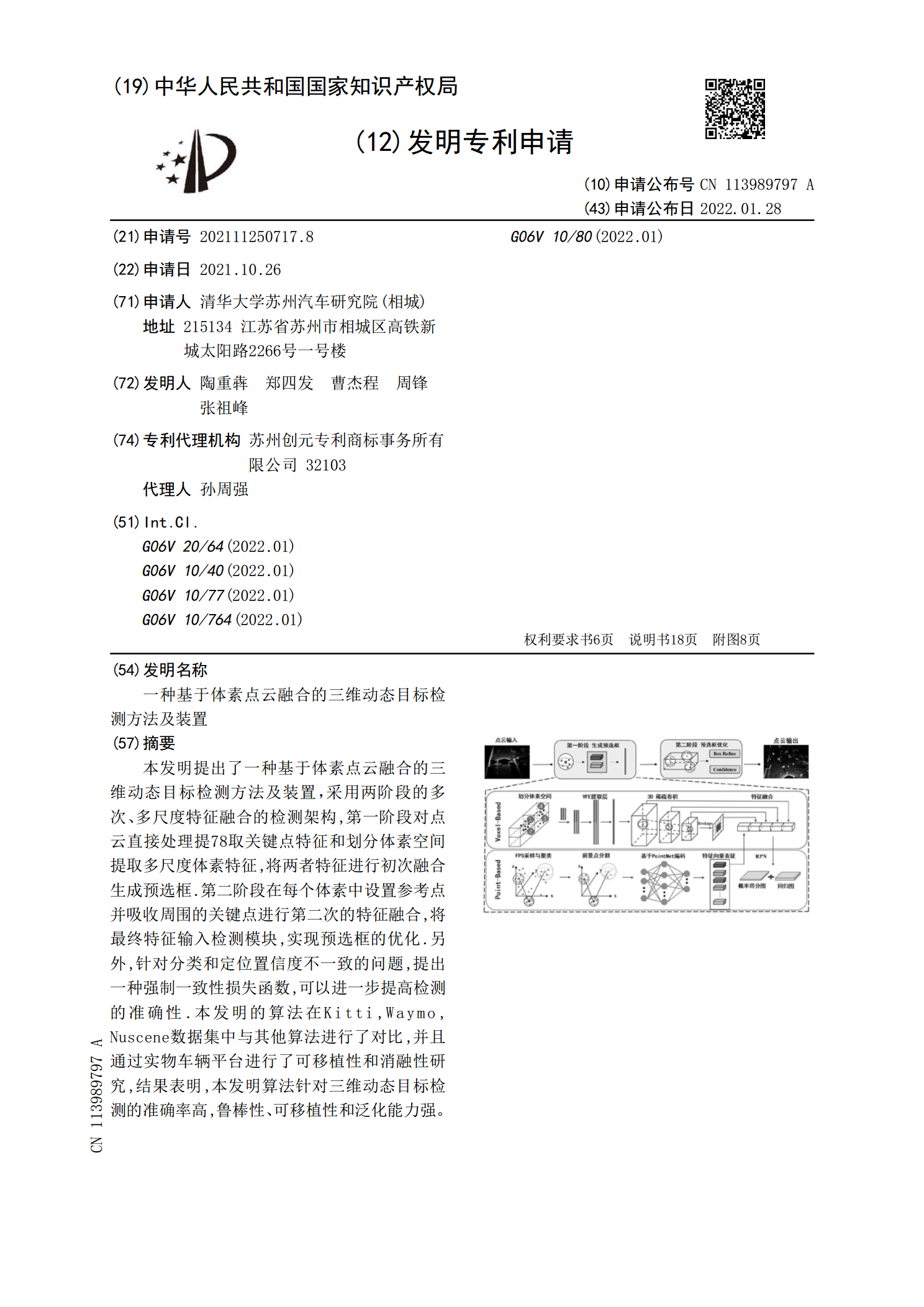
本发明提出了一种基于体素点云融合的三维动态目标检测方法及装置,采用两阶段的多次、多尺度特征融合的检测架构,第一阶段对点云直接处理提78取关键点特征和划分体素空间提取多尺度体素特征,将两者特征进行初次融合生成预选框.第二阶段在每个体素中设置参考点并吸收周围的关键点进行第二次的特征融合,将最终特征输入检测模块,实现预选框的优化.另外,针对分类和定位置信度不一致的问题,提出一种强制一致性损失函数,可以进一步提高检测的准确性.本发明的算法在Kitti,Waymo,Nuscene数据集中与其他算法进行了对比,并且通

一种基于体素和图卷积的三维点云语义分割方法.pdf
本发明公开了一种基于体素和图卷积的三维点云语义分割方法。该发明基于图卷积网络(GCN)通过充分保留数据粒度和利用点相互关系能带来显著的性能,但基于点的网络在数据结构(例如,最远点采样(FPS)和邻近点查询)上花费了大量时间,限制了速度和可扩展性的问题,提出基于体素和图卷积的解决方案,该方法可以快速有效的构建点云表示,提升网络的处理速度和可扩展性。本发明提出的基于体素和图卷积的三维点云语义分割方法,通过构建覆盖感知网格查询(CAGQ),利用网格空间的效率,覆盖感知网格查询(CAGQ)提高了空间覆盖率,同时降

三维点云精简方法.pdf
本发明公开了一种三维点云精简方法,涉及数据处理技术领域,包括:获取原始点云,并将原始点云划分为若干子点云;获取子点云中各点云的法向量参数,根据法向量参数,将子点云分为若干类;根据子点云的类别,对应每个类别构建特征损失函数和均匀性损失函数,并将每个类别对应的特征损失函数和均匀性损失函数相加,作为每个类别对应的损失函数;求解每个类别的损失函数,获得每个类别对应的重采样矩阵,得到该类别精简后的点云;将每个类别精简后的点云进行合并,得到子点云对应的精简点云;将子点云对应的精简点云进行合并,得到原始点云对应的精简点

基于体素化图卷积网络的三维点云目标检测方法.docx
基于体素化图卷积网络的三维点云目标检测方法基于体素化图卷积网络的三维点云目标检测方法摘要:随着三维点云数据的广泛应用,三维目标检测成为计算机视觉领域的重要研究方向之一。本文提出了一种基于体素化图卷积网络的三维点云目标检测方法。首先,我们将原始点云数据转化为三维体素网格表示,然后利用图卷积操作对体素化数据进行特征提取,最后使用分类器进行目标检测。实验结果表明,我们的方法在三维目标检测任务中取得了较好的性能。关键词:体素化;图卷积网络;点云目标检测1.引言目标检测是计算机视觉中的基本问题之一,主要是对图像或者