
基于时空融合图神经网络的交通预测方法及系统.pdf

猫巷****雪凝


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于时空融合图神经网络的交通预测方法及系统.pdf
本发明属于交通预测技术领域,具体公开了一种基于时空融合图神经网络的交通预测方法及系统,该方法利用各个交通节点的历史交通流量数据;计算各交通节点间的历史数据序列的相似度,构建时空邻接矩阵;根据原始路网邻接矩阵和时空邻接矩阵,组成下三角矩阵;将历史交通流量数据输入全连接层进行特征升维,设置具有多个子层的时空卷积重构层,将升维后的数据和下三角矩阵作为时空卷积重构层的输入;对时空卷积重构层的每个子层的输出进行聚合操作,并将聚合操作后的数据输入输出层,得到预测结果。采用本技术方案,能够更完整的保留交通数据的时空特征

一种基于时空融合图神经网络的交通流量预测方法.pdf
本发明提出一种基于时空融合图神经网络的交通流量预测方法,属于交通流时空数据预测领域。针对现有框架使用单独的模块来处理时空相关性以及只使用独立的组件来捕获局部或全局异构依赖关系,提出一种基于时空融合图神经网络的交通流量预测方法。本发明创新性地使用一种数据驱动的“时间图”生成方法,以补偿空间图可能无法反映的几种现有相关性,通过对不同时间段并行处理的各种时空图进行新的融合操作,可以有效地学习隐藏的时空依赖关系。同时,将该融合图模块和一个新的门卷积模块集成到一个统一的层中,可以学习更多的时空相关性来处理长序列。将
基于时空融合图神经网络的多风电场短期功率预测方法.pdf
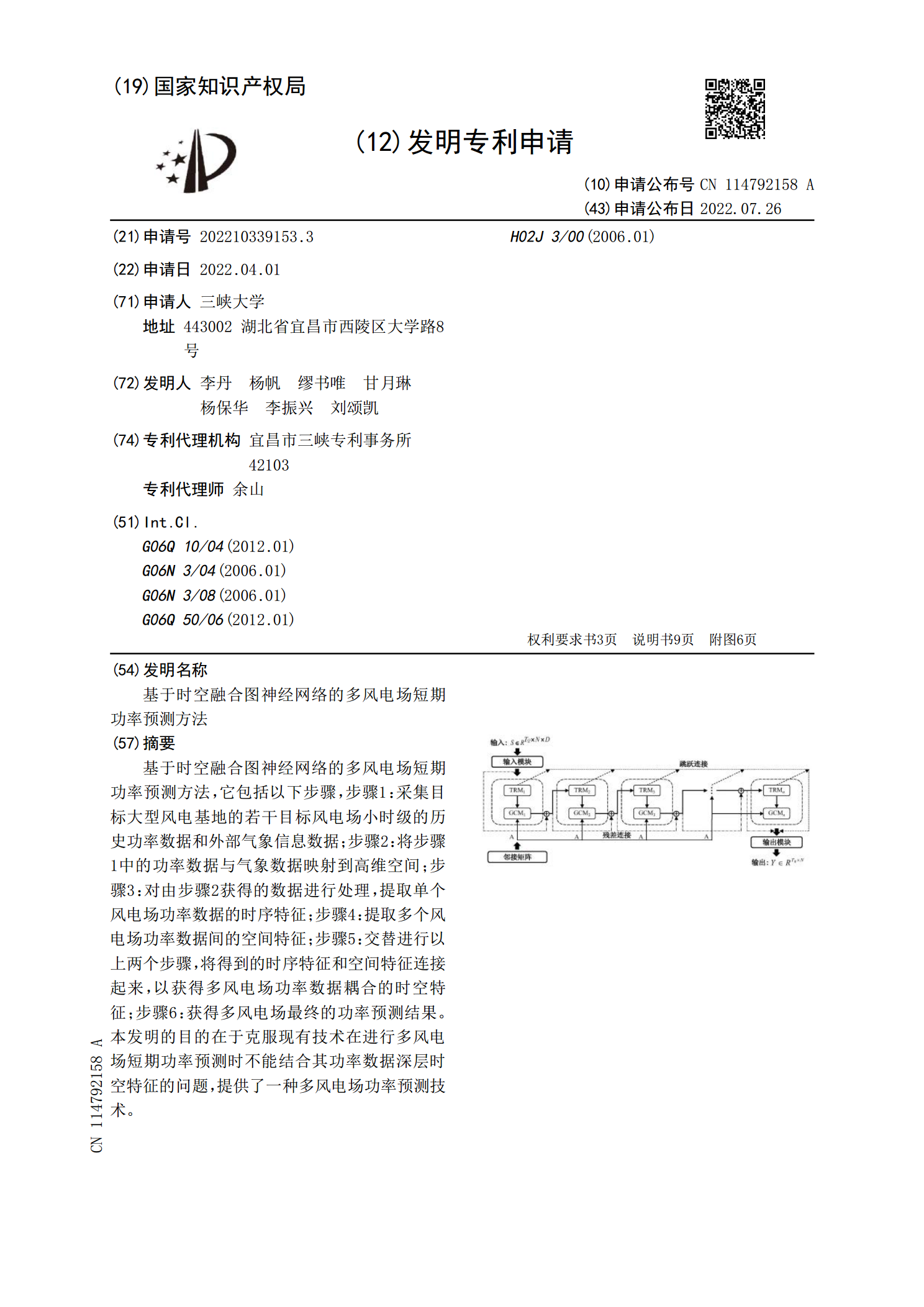
基于时空融合图神经网络的多风电场短期功率预测方法,它包括以下步骤,步骤1:采集目标大型风电基地的若干目标风电场小时级的历史功率数据和外部气象信息数据;步骤2:将步骤1中的功率数据与气象数据映射到高维空间;步骤3:对由步骤2获得的数据进行处理,提取单个风电场功率数据的时序特征;步骤4:提取多个风电场功率数据间的空间特征;步骤5:交替进行以上两个步骤,将得到的时序特征和空间特征连接起来,以获得多风电场功率数据耦合的时空特征;步骤6:获得多风电场最终的功率预测结果。本发明的目的在于克服现有技术在进行多风电场短期

一种基于多尺度时空融合图网络的交通预测方法.pdf
本发明提供了一种多尺度时空融合图网络交通预测方法。为了建模交通数据的时空相关性以及交通网络中固有的空间异质性,本发明提出了一种多尺度时空融合图网络预测框架(MFSTGN),具体来说,其中设计的一个时空图卷积模块(STGCN),它在保留交通网络固有结构的基础上动态建模时空相关性,并且通过一种趋势图卷积来描述交通流量的趋势变化情况,同时利用时空嵌入建模交通网络的空间异质性。此外,还开发了一个门控注意力机制,来自适应融合周期性依赖和趋势性依赖,使MFSTGN享有多序列信息。通过大量的实验证明,无论在交通速度数据

基于时空图神经网络的交通流概率预测研究.docx
基于时空图神经网络的交通流概率预测研究基于时空图神经网络的交通流概率预测研究摘要:随着城市交通流量的急剧增加,交通流预测成为了交通管理和规划中一个重要的问题。本论文提出了一种基于时空图神经网络的交通流概率预测模型,该模型将交通网络表示为一个时空图,并综合考虑了时间、空间和拓扑的复杂关系,提高了交通流预测的准确性和可解释性。实验结果表明,该模型在交通流概率预测方面具有较高的准确性和鲁棒性。1.引言交通流预测是城市交通管理和规划的核心任务之一。准确预测交通流的概率在应对交通拥堵、优化交通路线以及改善交通效率方