
基于轨迹结构提取的复杂路网地图匹配方法.pdf

慧红****ad

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于轨迹结构提取的复杂路网地图匹配方法.pdf
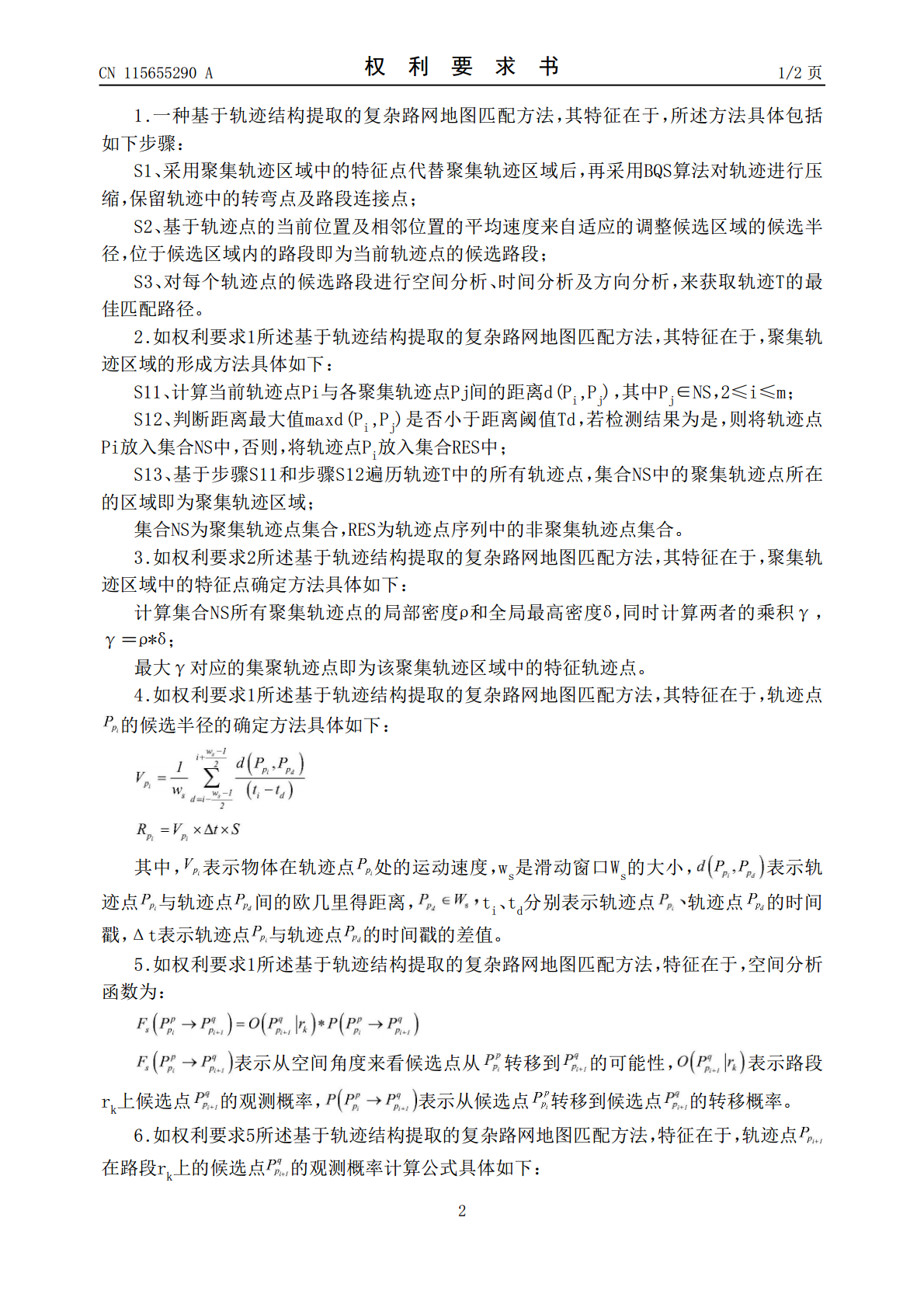
本发明公开一种基于轨迹结构提取的复杂路网地图匹配方法,包括如下步骤:S1、采用聚集轨迹区域中的特征点代替聚集轨迹区域后,再采用BQS算法对轨迹进行压缩,保留轨迹中的转弯点及路段连接点;S2、基于轨迹点的当前位置及相邻位置的平均速度来自适应的调整候选区域的候选半径,位于候选区域内的路段即为当前轨迹点的候选路段;S3、对每个轨迹点的候选路段进行空间分析、时间分析及方向分析,获取轨迹T的最佳匹配路径。对轨迹进行聚类压缩处理,获取聚集区域轨迹点,保留代表性轨迹点;针对道路的疏密程度,提出自适应选择候选路段,减少候

路网更新的轨迹-地图匹配方法.docx
路网更新的轨迹-地图匹配方法随着城市化和交通运输的发展,道路网络发生了巨大的变化。因此,为保持道路网络的准确性和完整性,需要进行道路网络更新。但是,道路网络更新是一个复杂和耗时的任务,需要利用高级技术和软件来提高效率和精度。其中,地图匹配方法是道路网络更新的重要组成部分。本论文将介绍地图匹配方法在道路网络更新中的应用。一、地图匹配方法概述地图匹配是指将现场测量得到的路段轨迹数据与数字地图中的路段进行匹配的过程。地图匹配主要包括两个部分:先将实际轨迹数据转换成数字化轨迹,然后将数字化轨迹与数字地图进行匹配。

基于浮动车轨迹数据的路网重构和地图匹配.docx
基于浮动车轨迹数据的路网重构和地图匹配标题:基于浮动车轨迹数据的路网重构和地图匹配摘要:随着城市交通系统的发展和智能交通技术的进步,浮动车轨迹数据作为一种重要的交通信息源,被广泛应用于路网重构和地图匹配。本论文主要研究基于浮动车轨迹数据的路网重构和地图匹配方法。首先,介绍了浮动车轨迹数据的特点和应用价值,然后分析了路网重构和地图匹配的基本问题和挑战。接着,提出了一种综合考虑轨迹数据特征的路网重构方法,并应用该方法进行数据挖掘和分析。最后,对基于浮动车轨迹数据的地图匹配方法进行研究,利用地理信息系统和网络分

基于步行GPS轨迹的路网提取方法.docx
基于步行GPS轨迹的路网提取方法摘要本文针对基于步行GPS轨迹的路网提取问题,提出了一种基于聚类和道路拓扑关系的方法。首先,使用聚类算法对原始GPS轨迹进行聚类,形成若干个代表轨迹。然后,基于道路拓扑关系,对代表轨迹进行路径匹配,最终得到最优路径和路网。实验结果表明,本文提出的方法能够有效地提取出步行GPS轨迹中的路网信息。关键词:步行GPS轨迹;路网提取;聚类;道路拓扑关系AbstractThispaperproposesamethodofroadnetworkextractionbasedonpede
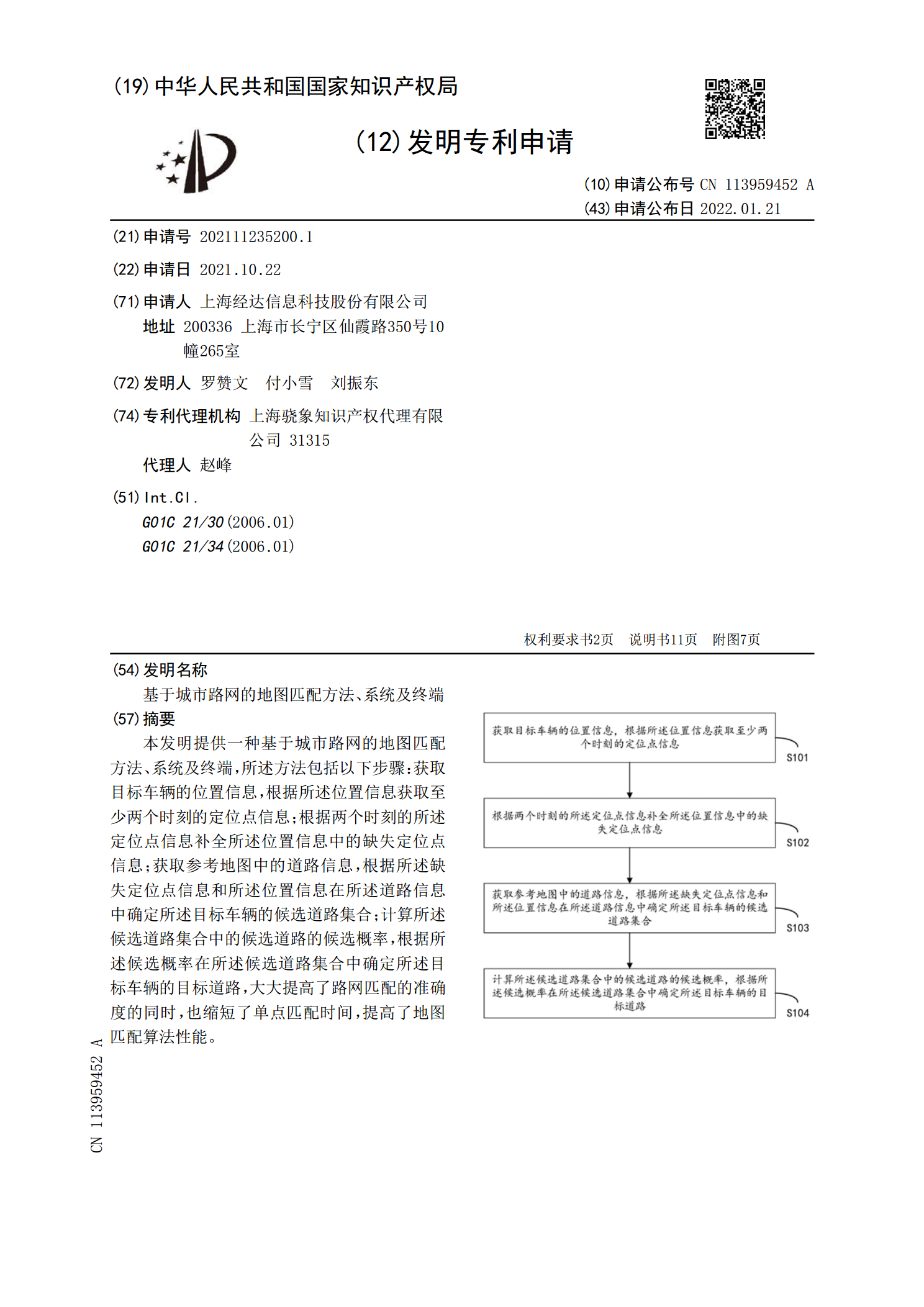
基于城市路网的地图匹配方法、系统及终端.pdf
本发明提供一种基于城市路网的地图匹配方法、系统及终端,所述方法包括以下步骤:获取目标车辆的位置信息,根据所述位置信息获取至少两个时刻的定位点信息;根据两个时刻的所述定位点信息补全所述位置信息中的缺失定位点信息;获取参考地图中的道路信息,根据所述缺失定位点信息和所述位置信息在所述道路信息中确定所述目标车辆的候选道路集合;计算所述候选道路集合中的候选道路的候选概率,根据所述候选概率在所述候选道路集合中确定所述目标车辆的目标道路,大大提高了路网匹配的准确度的同时,也缩短了单点匹配时间,提高了地图匹配算法性能。