
双基地前视合成孔径雷达地面动目标检测方法与成像方法.pdf

猫巷****正德


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

双基地前视合成孔径雷达地面动目标检测方法与成像方法.pdf
本发明公开了一种双基地前视合成孔径雷达地面动目标检测方法及成像方法。本发明的检测方法首先利用Bulk-Deramp滤波消除多普勒模糊,降低多普勒调频率的空变,接着利用一阶Keystone变换完成静止目标和地面动目标的距离徙动校正,然后利用扩展方位非线性调频变标操作均衡静止目标的多普勒调频率,同时使地面动目标的多普勒调频率与静止目标调频率不同,最后构造二阶模糊函数积,完成地面动目标的检测并估计出地面动目标的多普勒调频率,解决了BFSAR在强杂波背景下动目标与静止目标难区分的问题;本发明的成像方法是在完成地面

一种双基前视合成孔径雷达地面运动目标检测方法.pdf
本发明公开一种双基前视合成孔径雷达地面运动目标检测方法,针对BFSAR配置下地面动目标存在的问题,本发明提供的解决方案为:S1、对各通道的原始回波信号进行预滤波处理;S2、对步骤S1各通道的滤波结果进行一阶Keystone变换;S3、采用时分自适应抑制地面静物杂波;S4、采用改进的Wigner‑Ville分布方法将目标能量相干积累;本发明利用去斜预滤波器和Keystone变换来抑制多普勒模糊和校正跨距离单元徙动,通过时分自适应对消处理消除跨多普勒单元徙动的影响,有效抑制了地面静物杂波;并利用改进的Wign

一种固定发射站双基前视SAR动目标检测方法与成像方法.pdf
本发明公开了一种固定发射站双基前视合成孔径雷达(SAR)动目标检测方法及成像方法,本发明的检测方法利用接收站各通道间获取的复图像之间的差异,在频域去掉零频图像所代表的地面静止杂波,保留非零频图像所代表的动目标回波,从而完成了对地面制止杂波的抑制和对动目标的检测;本发明的成像方法在完成动目标检测后,再基于动目标的散焦图像实现对动目标多普勒参数的估计,从而利用估计出的动目标的多普勒参数完成对动目标的聚焦成像,解决了因动目标运动所产生的距离徙动和方位调制信号对检测及成像产生的影响。
视频合成孔径雷达的动目标联合检测前跟踪方法.pdf
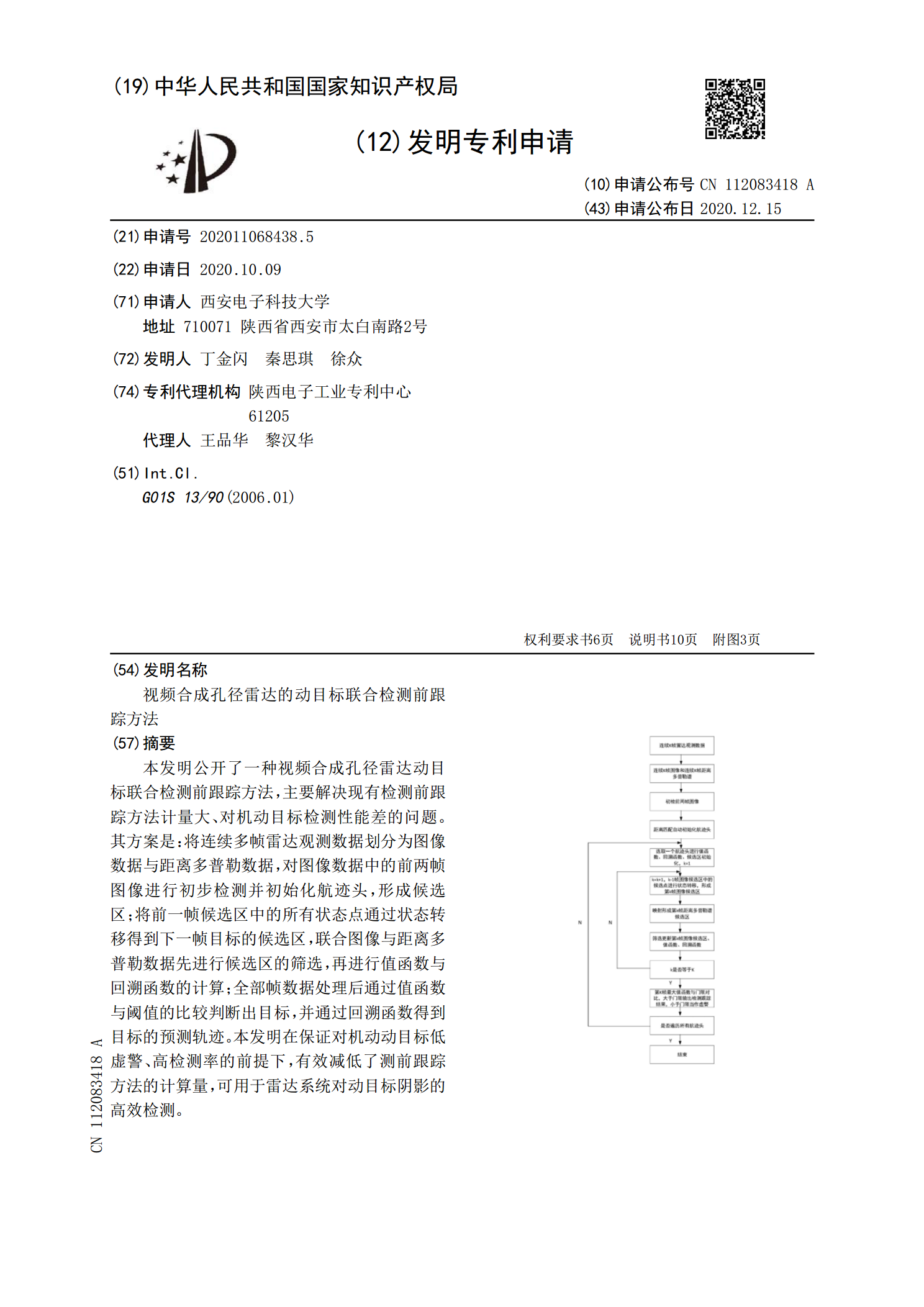
本发明公开了一种视频合成孔径雷达动目标联合检测前跟踪方法,主要解决现有检测前跟踪方法计量大、对机动目标检测性能差的问题。其方案是:将连续多帧雷达观测数据划分为图像数据与距离多普勒数据,对图像数据中的前两帧图像进行初步检测并初始化航迹头,形成候选区;将前一帧候选区中的所有状态点通过状态转移得到下一帧目标的候选区,联合图像与距离多普勒数据先进行候选区的筛选,再进行值函数与回溯函数的计算;全部帧数据处理后通过值函数与阈值的比较判断出目标,并通过回溯函数得到目标的预测轨迹。本发明在保证对机动动目标低虚警、高检测率

前视多通道合成孔径雷达解模糊成像方法.docx
前视多通道合成孔径雷达解模糊成像方法前视多通道合成孔径雷达(MovingTargetSyntheticApertureRadar,MTI-SAR)是一种能够对移动目标进行高分辨率成像的雷达技术。由于目标动态的因素,移动目标成像存在模糊问题,导致成像质量降低。因此,解模糊成像方法是MTI-SAR中的重要研究内容。本文将介绍MTI-SAR的原理,详细探讨几种常用的解模糊成像方法,并对比其优缺点。首先,我们来介绍MTI-SAR的基本原理。MTI-SAR利用雷达平台的运动,通过采集多个时刻的回波数据,从而形成细长