
基于GPS数据的机载SAR运动补偿方法.pdf

王秋****哥哥


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于GPS数据的机载SAR运动补偿方法.pdf
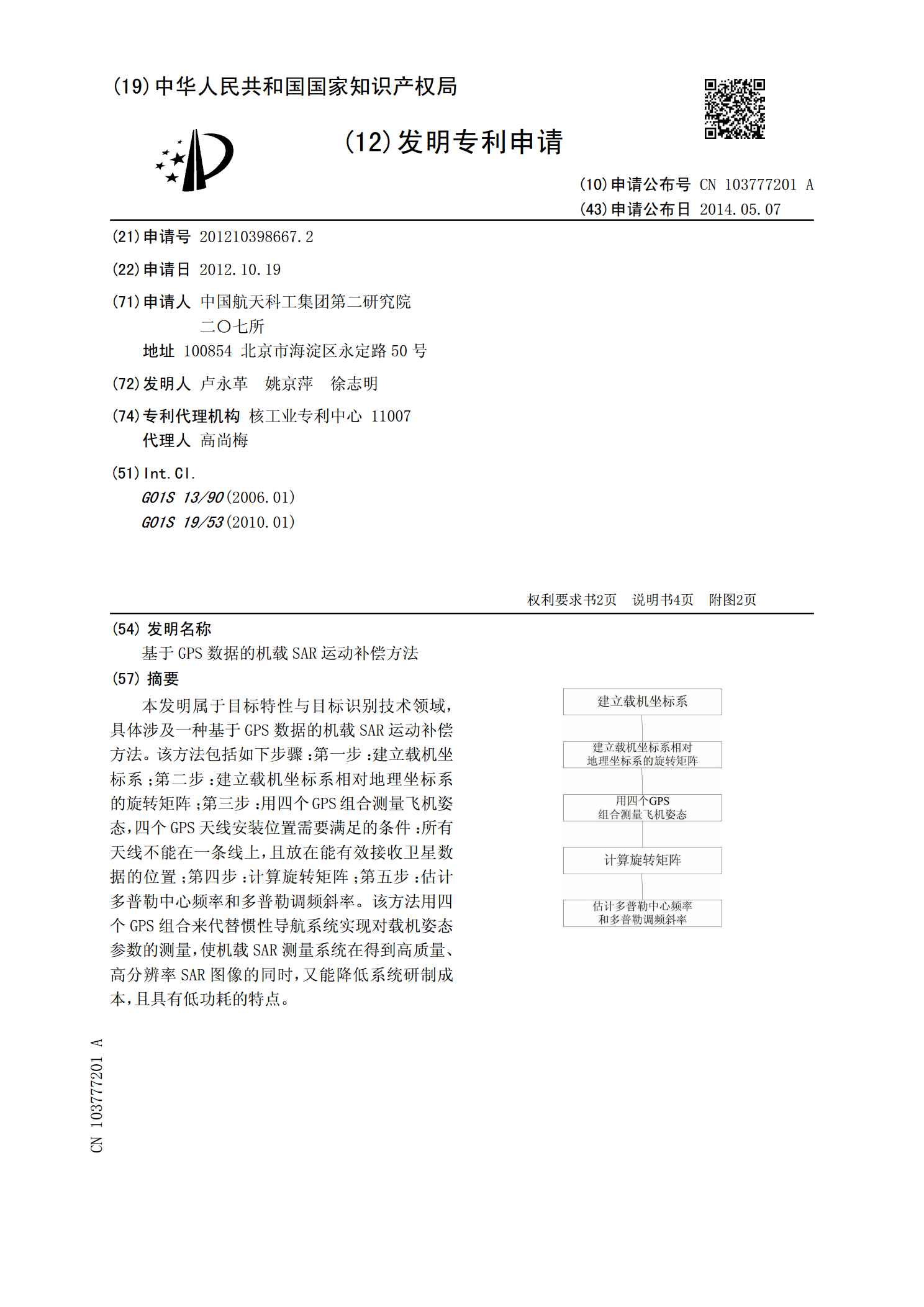
本发明属于目标特性与目标识别技术领域,具体涉及一种基于GPS数据的机载SAR运动补偿方法。该方法包括如下步骤:第一步:建立载机坐标系;第二步:建立载机坐标系相对地理坐标系的旋转矩阵;第三步:用四个GPS组合测量飞机姿态,四个GPS天线安装位置需要满足的条件:所有天线不能在一条线上,且放在能有效接收卫星数据的位置;第四步:计算旋转矩阵;第五步:估计多普勒中心频率和多普勒调频斜率。该方法用四个GPS组合来代替惯性导航系统实现对载机姿态参数的测量,使机载SAR测量系统在得到高质量、高分辨率SAR图像的同时,又能

基于回波数据的机载SAR运动补偿实时性研究的开题报告.docx
基于回波数据的机载SAR运动补偿实时性研究的开题报告题目:基于回波数据的机载SAR运动补偿实时性研究一、选题背景和意义合成孔径雷达(SAR)是一种主动式的遥感器,具有成像能力和独立于自然光源的能力,可在自然光无法穿透云、雨、雾等天气情况下获取地面信息。机载SAR系统是SAR技术的一种重要应用形式,通过安装于飞行器上,能够快速获取大面积的遥感图像数据。但是,机载SAR在飞行过程中会受到强烈的运动干扰,这会影响SAR成像的质量和精度。因此,进行运动补偿是机载SAR系统必须解决的问题之一。机载SAR运动补偿是指

基于MEMS IMU的机载SAR运动补偿方法研究的任务书.docx
基于MEMSIMU的机载SAR运动补偿方法研究的任务书一、背景和意义合成孔径雷达(SAR)是一种主动传感器,利用主动发射的微波信号获取目标散射信号并进行处理,从而成像目标表面的特征。随着SAR技术的发展,其在高精度地图制作、军事侦察、资源调查等领域得到了广泛的应用。在SAR成像过程中,平台运动对图像质量产生了较大影响。因此,为了保证SAR成像质量和位置精度,需要对平台运动进行补偿。MEMS惯性测量单元(IMU)作为一种小型化、高性能的姿态传感器,可以实现对平台运动进行高精度测量,因此被广泛应用于SAR机载

基于回波数据的机载SAR运动误差提取方法研究.docx
基于回波数据的机载SAR运动误差提取方法研究基于回波数据的机载SAR运动误差提取方法研究摘要:合成孔径雷达(SAR)的运动误差直接影响到图像质量和精度。因此,对于机载SAR来说,准确提取运动误差是至关重要的。本论文针对机载SAR,通过分析回波数据,研究了一种基于回波数据的机载SAR运动误差提取方法。该方法可以利用回波数据中的相位信息对运动误差进行估计,并利用估计结果对SAR图像进行校正。实验结果表明,该方法能够有效提取出机载SAR的运动误差,并显著改善了图像质量和精度。关键词:合成孔径雷达,机载SAR,运

基于回波数据的机载SAR运动补偿和自聚焦技术研究.docx
基于回波数据的机载SAR运动补偿和自聚焦技术研究摘要:机载合成孔径雷达(SAR)在高分辨率遥感应用中具有重要的地位,但其成像质量受到飞行器的运动影响,因此需要进行运动补偿和自聚焦。本文综述了机载SAR运动补偿和自聚焦技术的研究现状和发展趋势,包括常见的补偿方法和自聚焦算法。同时,对研究存在的问题进行分析并提出了改进和优化的建议。一、引言合成孔径雷达(SAR)是一种高分辨率遥感技术,具有在夜间和云层中进行全天候成像的能力。与传统光学或红外遥感技术相比,SAR可以提供更高的空间分辨率和更准确的物体定位信息。然