
用于机器人训练的用户接口.pdf

猫巷****婉慧


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于机器人训练的用户接口.pdf
根据各个实施例,在机器人内嵌入的用户接口经由直接和直觉的物理交互促成了机器人训练。在一些实施例中,用户接口包括手腕套箍,当由用户抓住该手腕套箍时,将机器人转换到不受力重力补偿模式。

用于支付的用户接口.pdf
本发明涉及一种用于支付的用户接口。本公开内容涉及利用移动设备进行支付。在一个示例过程中,移动设备在该移动设备上接收并且存储用于一个或者多个支付账户的信息。设备用来使用支付账户进行支付。在一些示例中,在由用户进行每个购买之前,执行对继续进行支付的授权。授权过程可以包括接收用户的验证,诸如指纹扫描或者密码。在一些示例中,支付账户选自可用的支付账户。在一些示例中,显示与购买的项目相关联的数字项目的指示。在一些示例中,发起与正在进行的通信的参与者的支付交易。在一些示例中,基于应用的可用性来调用零售商的应用。在一些

用于投影设备的用户接口.pdf
本发明公开一种投影机、投影系统以及用户接口。一种示例性投影系统可包括适于投影图像的投影设备。用户接口可被用于与投影设备通信,并可被配置为控制投影设备的多个投影机设置。用户接口可被配置为在第二突出显示轮廓内同时显示第一级菜单项和第二级菜单项的列表。第二级菜单项的列表的显示可以通过对第一级菜单项的选择来调出。
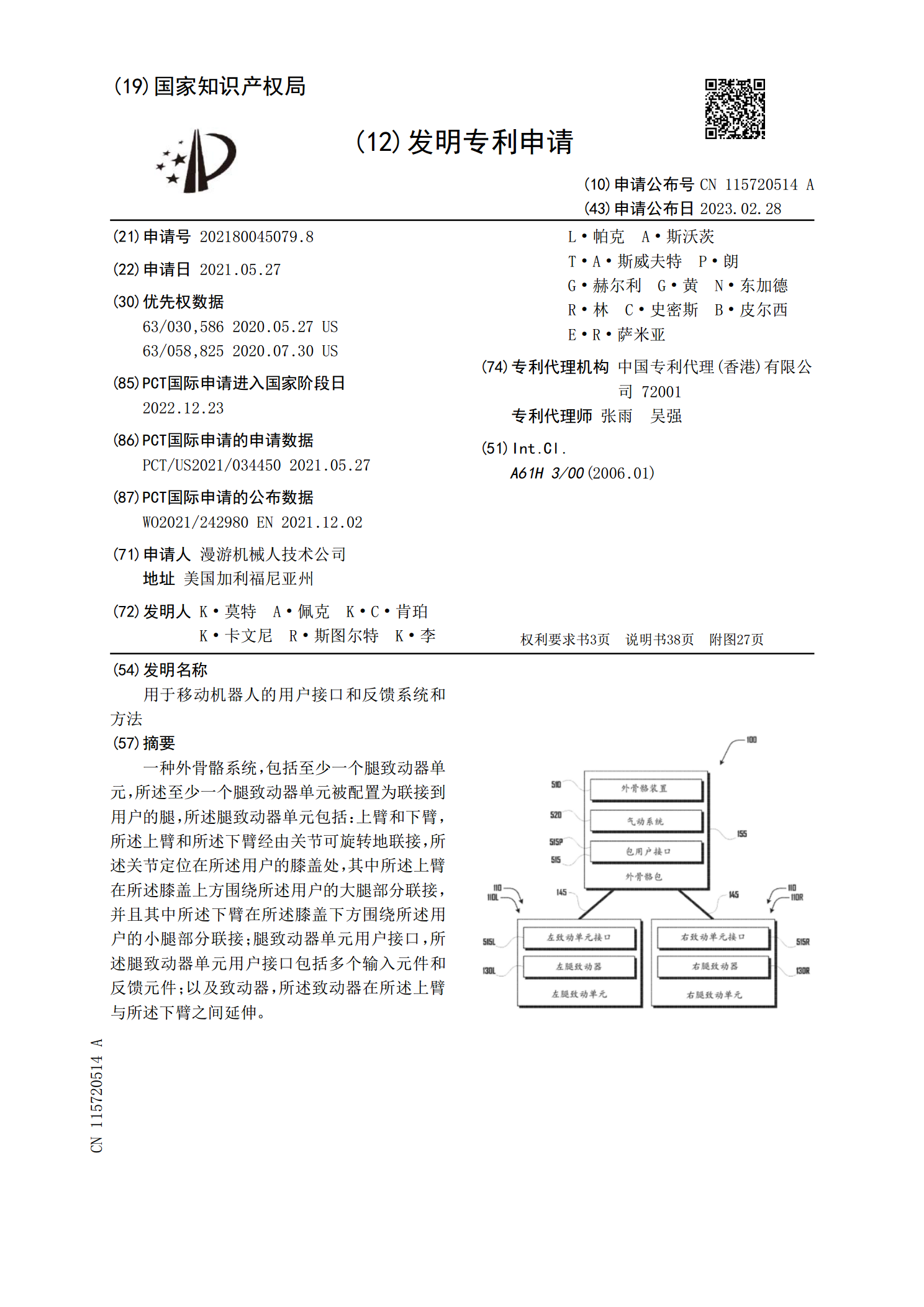
用于移动机器人的用户接口和反馈系统和方法.pdf
一种外骨骼系统,包括至少一个腿致动器单元,所述至少一个腿致动器单元被配置为联接到用户的腿,所述腿致动器单元包括:上臂和下臂,所述上臂和所述下臂经由关节可旋转地联接,所述关节定位在所述用户的膝盖处,其中所述上臂在所述膝盖上方围绕所述用户的大腿部分联接,并且其中所述下臂在所述膝盖下方围绕所述用户的小腿部分联接;腿致动器单元用户接口,所述腿致动器单元用户接口包括多个输入元件和反馈元件;以及致动器,所述致动器在所述上臂与所述下臂之间延伸。
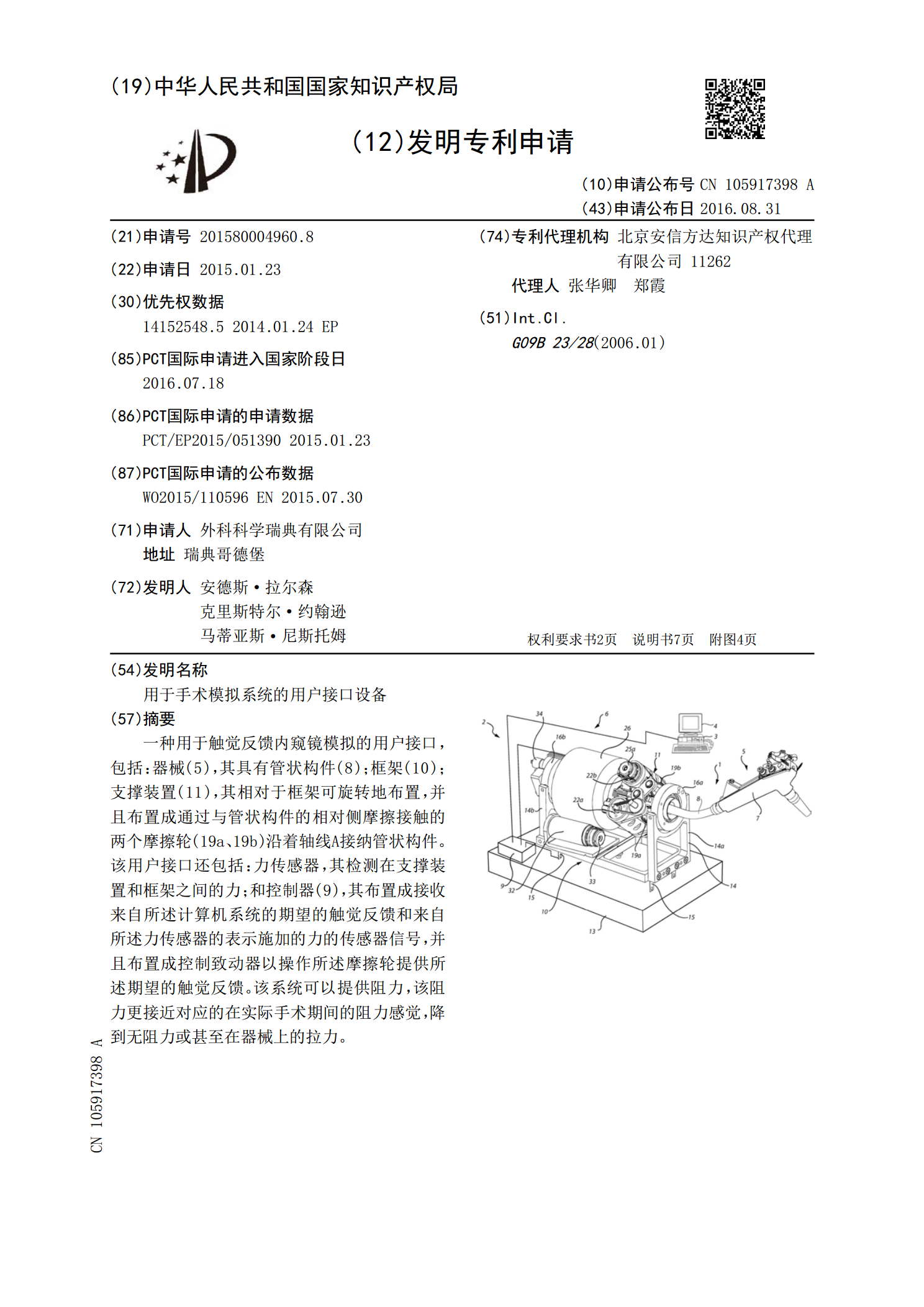
用于手术模拟系统的用户接口设备.pdf
一种用于触觉反馈内窥镜模拟的用户接口,包括:器械(5),其具有管状构件(8);框架(10);支撑装置(11),其相对于框架可旋转地布置,并且布置成通过与管状构件的相对侧摩擦接触的两个摩擦轮(19a、19b)沿着轴线A接纳管状构件。该用户接口还包括:力传感器,其检测在支撑装置和框架之间的力;和控制器(9),其布置成接收来自所述计算机系统的期望的触觉反馈和来自所述力传感器的表示施加的力的传感器信号,并且布置成控制致动器以操作所述摩擦轮提供所述期望的触觉反馈。该系统可以提供阻力,该阻力更接近对应的在实际手术期间