
机载雷达自适应双指向和差波束的目标联合检测方法.pdf

书生****aa


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机载雷达自适应双指向和差波束的目标联合检测方法.pdf
本发明属于雷达目标检测技术领域,公开了机载雷达自适应双指向和差波束的目标联合检测方法,其具体步骤为:构造主波束中心向左偏离设定角度和向右偏离设定角度的两个等波束的空域导向矢量,令q依次取1和2,对上述空时二维回波数据中每个距离单元的数据分别进行多普勒域的因子化方法处理,得出第q等波束的约束下对应距离单元的空域自适应滤波结果;针对第q等波束的约束下各个距离单元的空域自适应滤波结果,分别进行单元平均恒虚警检测,得出第q组目标检测结果;如果在第1组目标检测结果和第2组目标检测结果中,任一组目标检测结果为存在目标

机载气象雷达天线波束指向自适应信号处理方法.pdf
本发明提供一种机载气象雷达天线波束指向自适应信号处理方法,包括以下步骤:步骤一、计算波束指向误差方程;步骤二、计算主波束增益和偏置角关系方程;步骤三、通过步骤一和步骤二的波束指向误差方程和主波束增益和偏置角关系方程,进行波束指向误差自适应估计;步骤四、进行载机扫描策略设定;步骤五、根据设定的载机扫描策略进行波束指向误差分解。本发明实施例通过天线波束几何形状和接受杂波信号功率估算天线指向误差,并解耦出误差分量,然后把误差分量送入空域稳定程序中,提高天线指向精度,实现气象目标的精确探测与显示,改善气象雷达探测
基于快速自适应脉冲压缩的机载气象雷达目标检测方法.pdf
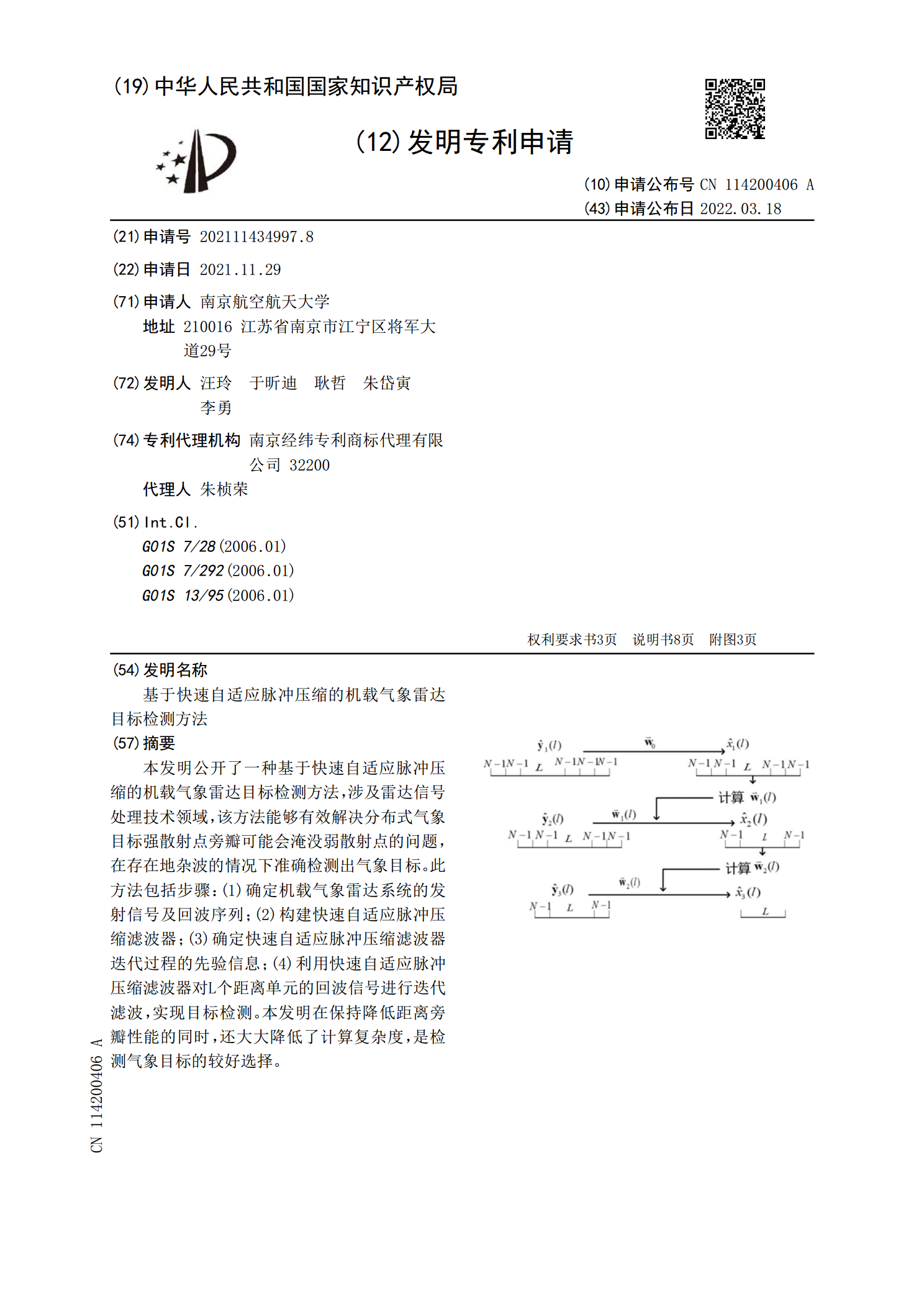
本发明公开了一种基于快速自适应脉冲压缩的机载气象雷达目标检测方法,涉及雷达信号处理技术领域,该方法能够有效解决分布式气象目标强散射点旁瓣可能会淹没弱散射点的问题,在存在地杂波的情况下准确检测出气象目标。此方法包括步骤:(1)确定机载气象雷达系统的发射信号及回波序列;(2)构建快速自适应脉冲压缩滤波器;(3)确定快速自适应脉冲压缩滤波器迭代过程的先验信息;(4)利用快速自适应脉冲压缩滤波器对L个距离单元的回波信号进行迭代滤波,实现目标检测。本发明在保持降低距离旁瓣性能的同时,还大大降低了计算复杂度,是检测气

基于空时自适应处理雷达的和差波束形成方法.pdf
本发明公开一种基于空时自适应处理雷达的和差波束形成方法,主要解决现有技术主瓣响应失真的问题。其实现步骤是:1.在信号处理机中输入空时自适应处理雷达的采样数据;2.根据采样数据估计得到采样协方差矩阵;3.设计五个约束点的角度和多普勒;4.根据采样协方差矩阵和五个约束点,设计和波束权矢量;5.根据采样协方差矩阵和五个约束点,设计空域差波束权矢量;6.根据采样协方差矩阵和五个约束点,设计时域差波束权矢量;7.根据采样数据和波束权矢量,得到和波束、空域差波束和时域差波束的输出信号。本发明通过幅度相位联合约束、导数

基于极大化极小的机载MIMO雷达目标稳健检测联合设计方法.pdf
本发明公开了基于极大化极小的机载MIMO雷达目标稳健检测联合设计方法,包括Step1.建立机载MIMO雷达波形相关信号模型;Step2.在机载MIMO雷达波形相关信号模型的基础上,建立基于极大化极小的机载MIMO雷达稳健联合设计问题模型;Step3.针对基于极大化极小的机载MIMO雷达稳健联合设计问题模型,设计机载MIMO雷达发射波形和接收滤波器组稳健联合优化方法;本方法通过在目标可能出现的区域设计一组滤波器,并以收滤波器组输出端的最坏信干噪比作为优化准则,同时考虑波形的能量约束和峰均比约束,提出了一种基