
基于惯导/多普勒雷达组合的车载定位定向方法.pdf

努力****承悦

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于惯导/多普勒雷达组合的车载定位定向方法.pdf
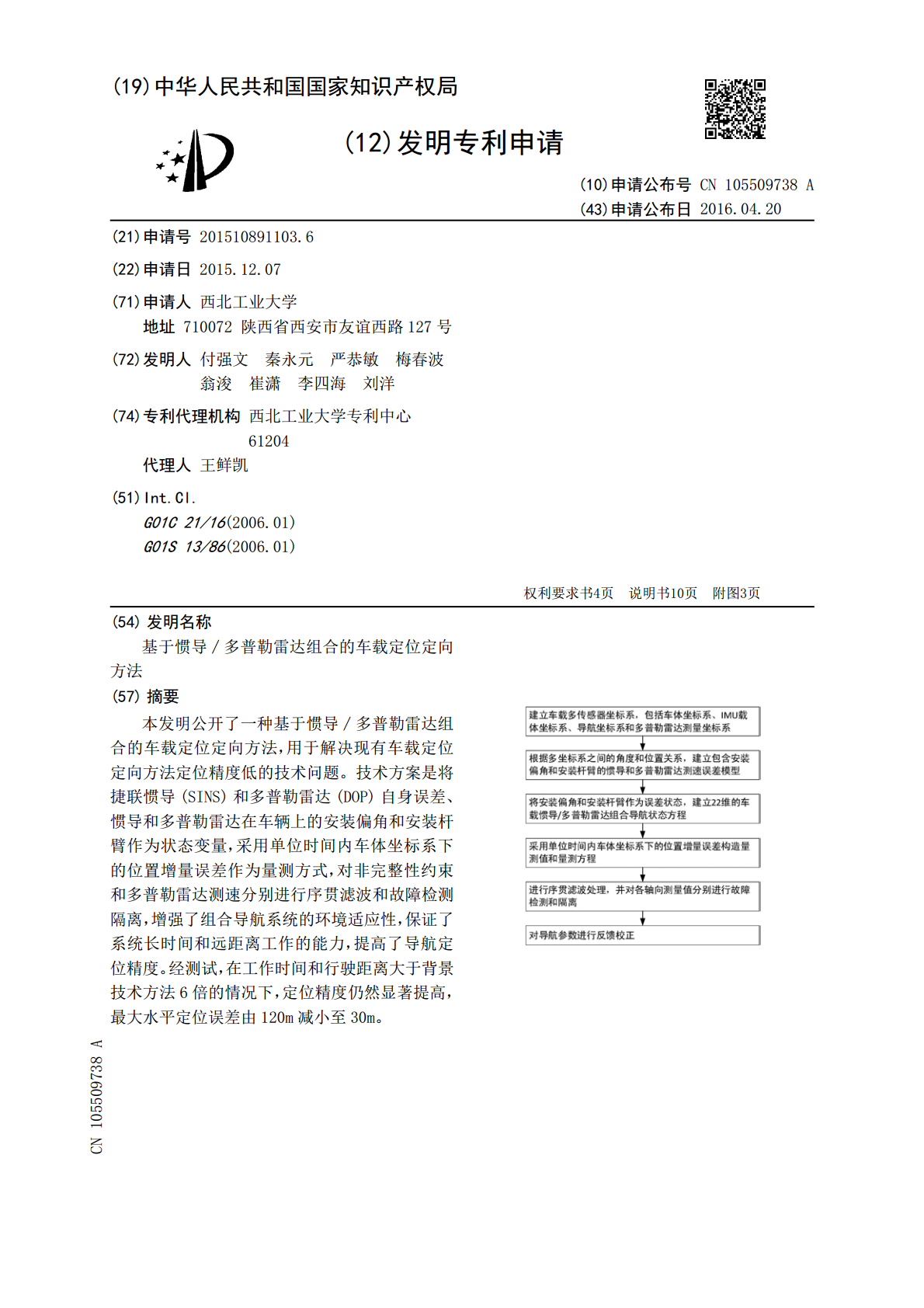
本发明公开了一种基于惯导/多普勒雷达组合的车载定位定向方法,用于解决现有车载定位定向方法定位精度低的技术问题。技术方案是将捷联惯导(SINS)和多普勒雷达(DOP)自身误差、惯导和多普勒雷达在车辆上的安装偏角和安装杆臂作为状态变量,采用单位时间内车体坐标系下的位置增量误差作为量测方式,对非完整性约束和多普勒雷达测速分别进行序贯滤波和故障检测隔离,增强了组合导航系统的环境适应性,保证了系统长时间和远距离工作的能力,提高了导航定位精度。经测试,在工作时间和行驶距离大于背景技术方法6倍的情况下,定位精度仍然显著
一种基于车载惯组与多普勒雷达的组合导航方法及系统.pdf
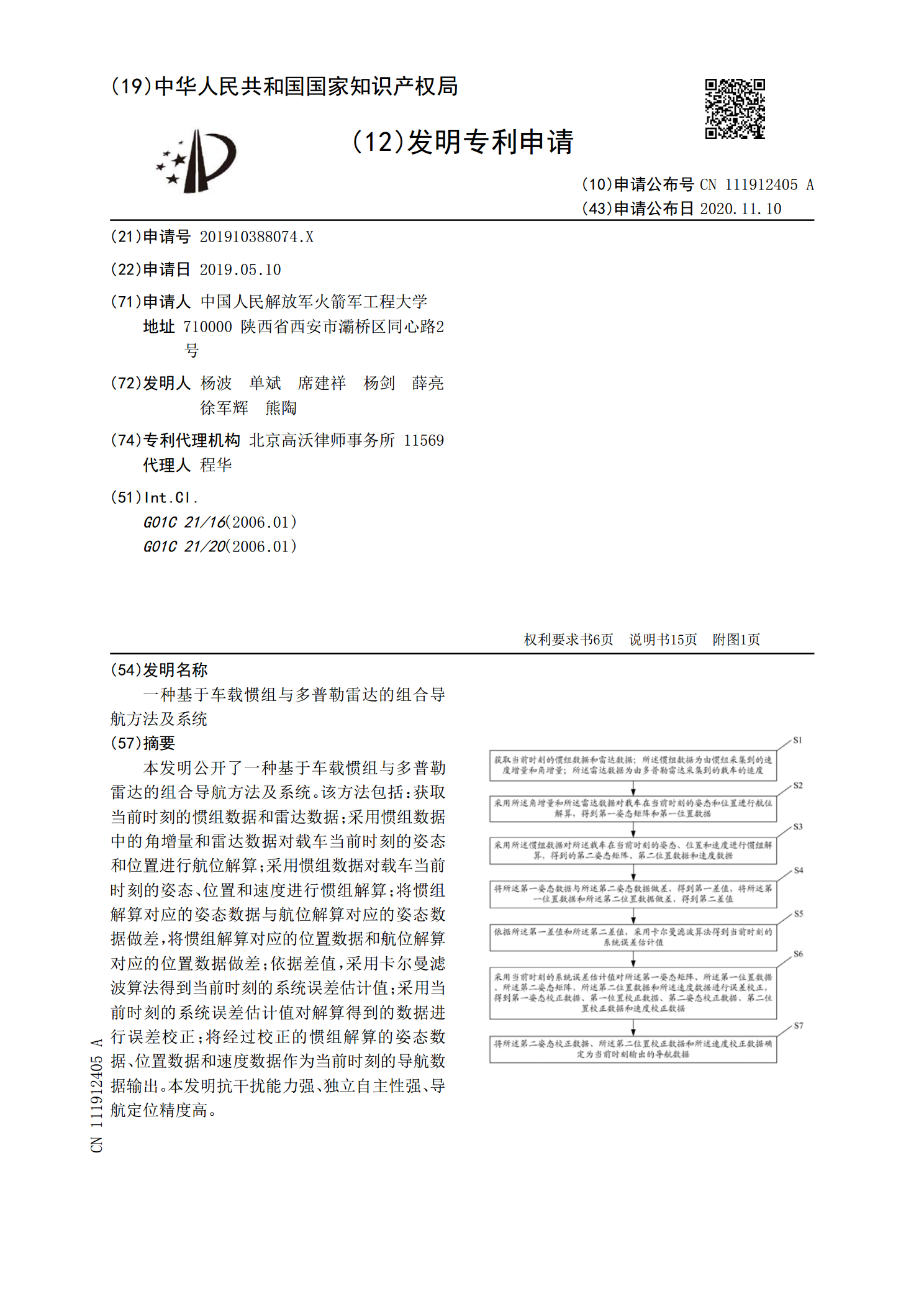
本发明公开了一种基于车载惯组与多普勒雷达的组合导航方法及系统。该方法包括:获取当前时刻的惯组数据和雷达数据;采用惯组数据中的角增量和雷达数据对载车当前时刻的姿态和位置进行航位解算;采用惯组数据对载车当前时刻的姿态、位置和速度进行惯组解算;将惯组解算对应的姿态数据与航位解算对应的姿态数据做差,将惯组解算对应的位置数据和航位解算对应的位置数据做差;依据差值,采用卡尔曼滤波算法得到当前时刻的系统误差估计值;采用当前时刻的系统误差估计值对解算得到的数据进行误差校正;将经过校正的惯组解算的姿态数据、位置数据和速度数

基于双激光多普勒测速仪和惯导系统组合导航方法及装置.pdf
本发明提出了一种基于双激光多普勒测速仪和惯导系统组合导航方法及装置,先构建两激光多普勒测速仪在载体坐标系下的输出速度以及速度误差模型;将两激光多普勒测速仪的刻度系数误差和安装角误差以及惯导系统的惯导姿态误差、速度误差、位置误差、陀螺测量误差、加速度计测量误差作为状态向量,构建滤波系统的状态方程;将惯导系统在载体坐标系中的位移增量与两激光多普勒测速仪在载体坐标系下的位移增量之差以及由惯导系统得到的航向角与由两个激光多普勒测速仪得到的航向角之差作为观测量,构建滤波系统的观测方程;由滤波得到的状态向量对双激光多
基于LASSO特征提取的多普勒穿墙雷达定位方法.pdf
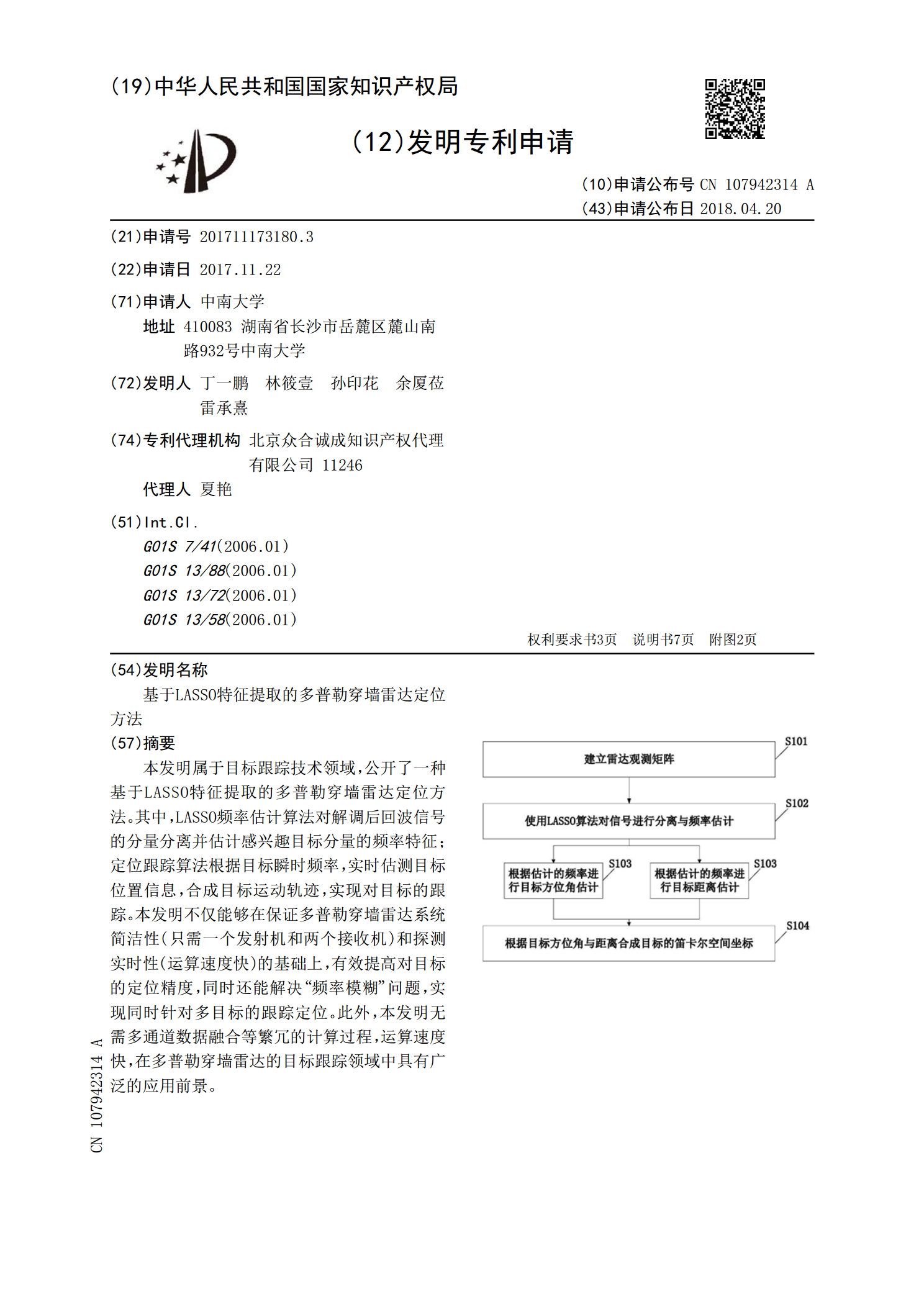
本发明属于目标跟踪技术领域,公开了一种基于LASSO特征提取的多普勒穿墙雷达定位方法。其中,LASSO频率估计算法对解调后回波信号的分量分离并估计感兴趣目标分量的频率特征;定位跟踪算法根据目标瞬时频率,实时估测目标位置信息,合成目标运动轨迹,实现对目标的跟踪。本发明不仅能够在保证多普勒穿墙雷达系统简洁性(只需一个发射机和两个接收机)和探测实时性(运算速度快)的基础上,有效提高对目标的定位精度,同时还能解决“频率模糊”问题,实现同时针对多目标的跟踪定位。此外,本发明无需多通道数据融合等繁冗的计算过程,运算速

基于扩展贝塞尔模型的多普勒穿墙雷达定位方法.pdf
本发明公开了一种基于扩展贝塞尔模型的霍夫变换的多普勒穿墙雷达定位方法,属于目标跟踪技术领域,基于扩展贝塞尔模型的霍夫变换频率估计算法,用于提取接收回波中感兴趣的目标分量并对其瞬时频率特征值进行估计,通过引入参数,构造扩展贝塞尔曲线,进而通过动态调整参数,当信号能量能最大程度的集中时确定的值,此时拟合结果最近似于目标瞬时频率曲线时,完成对目标瞬时频率的估计,相比于不加入参数时精度得到提高,具有创新性;定位跟踪算法,用于根据瞬时频率对目标进行实时估测位置信息,合成目标运动轨迹,实现对目标的跟踪。