
基于连续波微多普勒雷达的非接触式手势识别系统与方法.pdf

一只****爱敏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于连续波微多普勒雷达的非接触式手势识别系统与方法.pdf
本发明公开了一种基于连续波微多普勒雷达的非接触式手势识别系统与方法。发射链路包括基带信号产生模块、发射机和发射天线,接收链路包括信号采集处理模块、三个接收机及其各自连接的接收天线,信号采集处理模块与上位机连接,并与基带信号产生模块时钟同步;天线均使用贴片天线,均平行朝向于人手方向,三个接收天线摆放位置不同且不共线;发射信号经由目标反射后由接收天线接收,根据接收采集的不同信号数据解算得到人手整体在三维空间中的运动轨迹,通过采集到信号的特征匹配识别获得手指的运动动作。本发明实现了非接触性地对人手在三维空间中定
非接触式多普勒雷达仿真系统.pdf
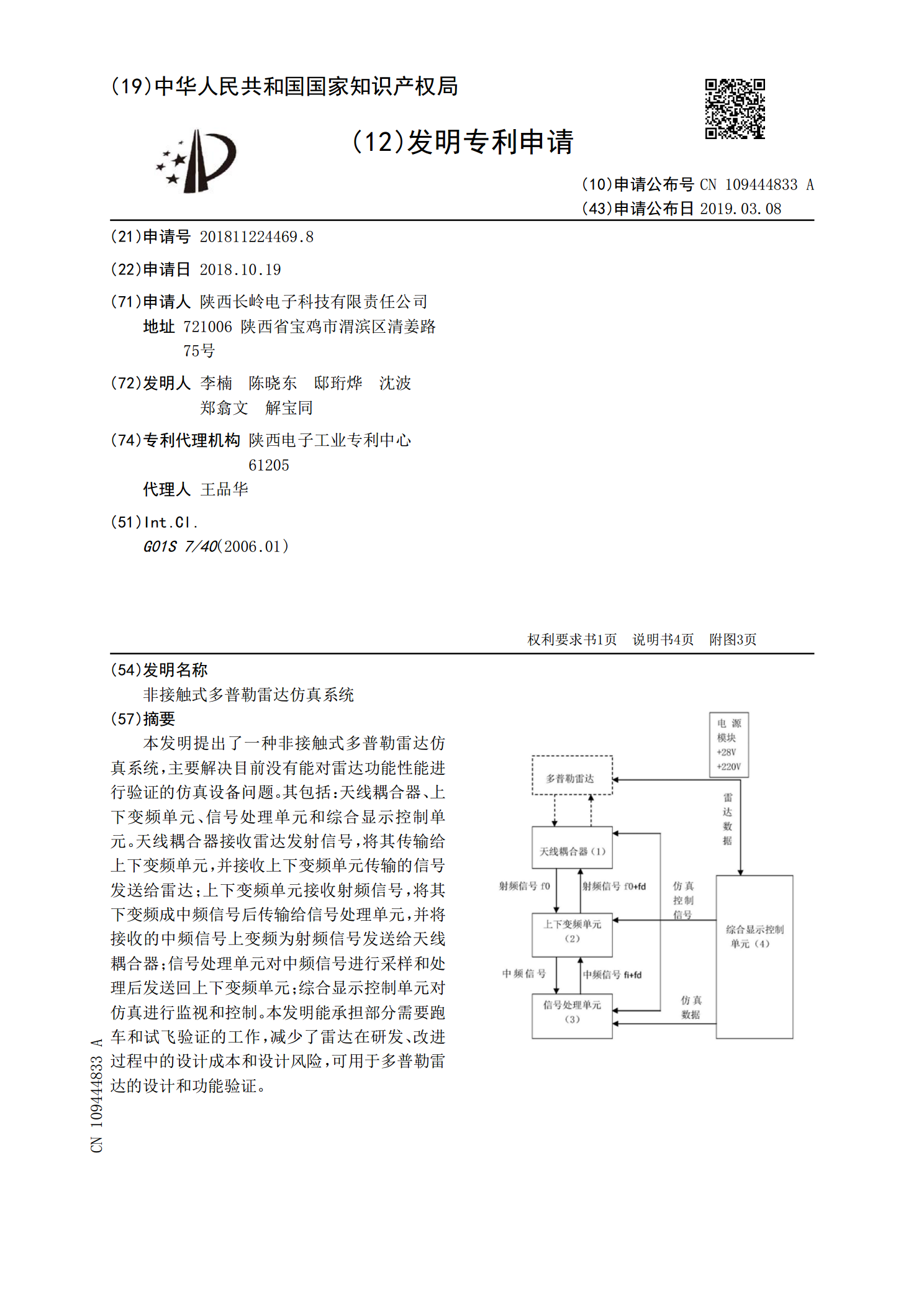
本发明提出了一种非接触式多普勒雷达仿真系统,主要解决目前没有能对雷达功能性能进行验证的仿真设备问题。其包括:天线耦合器、上下变频单元、信号处理单元和综合显示控制单元。天线耦合器接收雷达发射信号,将其传输给上下变频单元,并接收上下变频单元传输的信号发送给雷达;上下变频单元接收射频信号,将其下变频成中频信号后传输给信号处理单元,并将接收的中频信号上变频为射频信号发送给天线耦合器;信号处理单元对中频信号进行采样和处理后发送回上下变频单元;综合显示控制单元对仿真进行监视和控制。本发明能承担部分需要跑车和试飞验证的

一种基于微多普勒特征的动态连续/非连续手势识别方法.pdf
本发明提出的一种基于微多普勒特征的动态连续/非连续手势识别方法,属于雷达技术领域和人机交互领域。该方法首先通过雷达采集动态连续/非连续手势数据,即时域雷达信号;随后对时域雷达信号进行时频分析得到回波信号的多普勒频率随时间变化图像,即每组数据的时频图;通过对每组数据的时频分析结果进行噪声滤除和特征提取,得到手势动作的相关特征;最后由支持向量机实现对手势动作的识别分类。本发明通过引入雷达多普勒效应,降低了环境、光照等因素对手势识别的影响,提高了动态手势的识别能力。
基于连续波雷达的非接触式生命体征监测系统设计与实现.doc
基于连续波雷达的非接触式生命体征监测系统设计与实现人体的健康状况是由诸多生理参数所反映的,这些参数包含并不局限于身高、体重、血压、心率、呼吸速率、血糖等,对这类参数的精确测量对健康状况的判断有着重要意义.呼吸及心跳信号是各种生理信号中表征较为明显的两类,与心肺功能有着直接联系,而心肺健康对于长期呈坐姿伏案工作的现代人群而言有着更重要的现实意义。由于近年来因突发性心肺病症而导致死亡的例子有所增多,且心肺相关的疾病往往具有突发的特点,因此对高危群体的监测要在精确的基础上做到长期、实时、无扰,进而为及时救治提供

基于连续波雷达的非接触式生命体征监测系统设计与实现.doc
基于连续波雷达的非接触式生命体征监测系统设计与实现人体的健康状况是由诸多生理参数所反映的,这些参数包含并不局限于身高、体重、血压、心率、呼吸速率、血糖等,对这类参数的精确测量对健康状况的判断有着重要意义.呼吸及心跳信号是各种生理信号中表征较为明显的两类,与心肺功能有着直接联系,而心肺健康对于长期呈坐姿伏案工作的现代人群而言有着更重要的现实意义.由于近年来因突发性心肺病症而导致死亡的例子有所增多,且心肺相关的疾病往往具有突发的特点,因此对高危群体的监测要在精确的基础上做到长期、实时、无扰,进而为及时救治提供