
一种多普勒辅助水下传感器网络时间同步方法.pdf

邻家****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多普勒辅助水下传感器网络时间同步方法.pdf
本发明公开了一种多普勒辅助水下传感器网络时间同步方法。信标节点不断广播信息数据包,待同步节点不断接收信标节点广播的信息,在每次接收到信息时记录待同步节点的本地时间,并且计算与信标节点之间的相对速度;待同步节点利用收集到的数据计算时钟的频率偏斜;待同步节点计算出时钟频率偏斜后给信标节点发送一个请求信息;信标节点收到待同步节点发送的请求信息后,随机等待一段时间给待同步节点发送一个响应信息;待同步节点接收信标节点发送的响应信息时记录本地时间,并计算方法计算与信标节点之间的相对速度,最后通过收集的数据计算最终的时
一种水下传感器网络时间同步方法.pdf
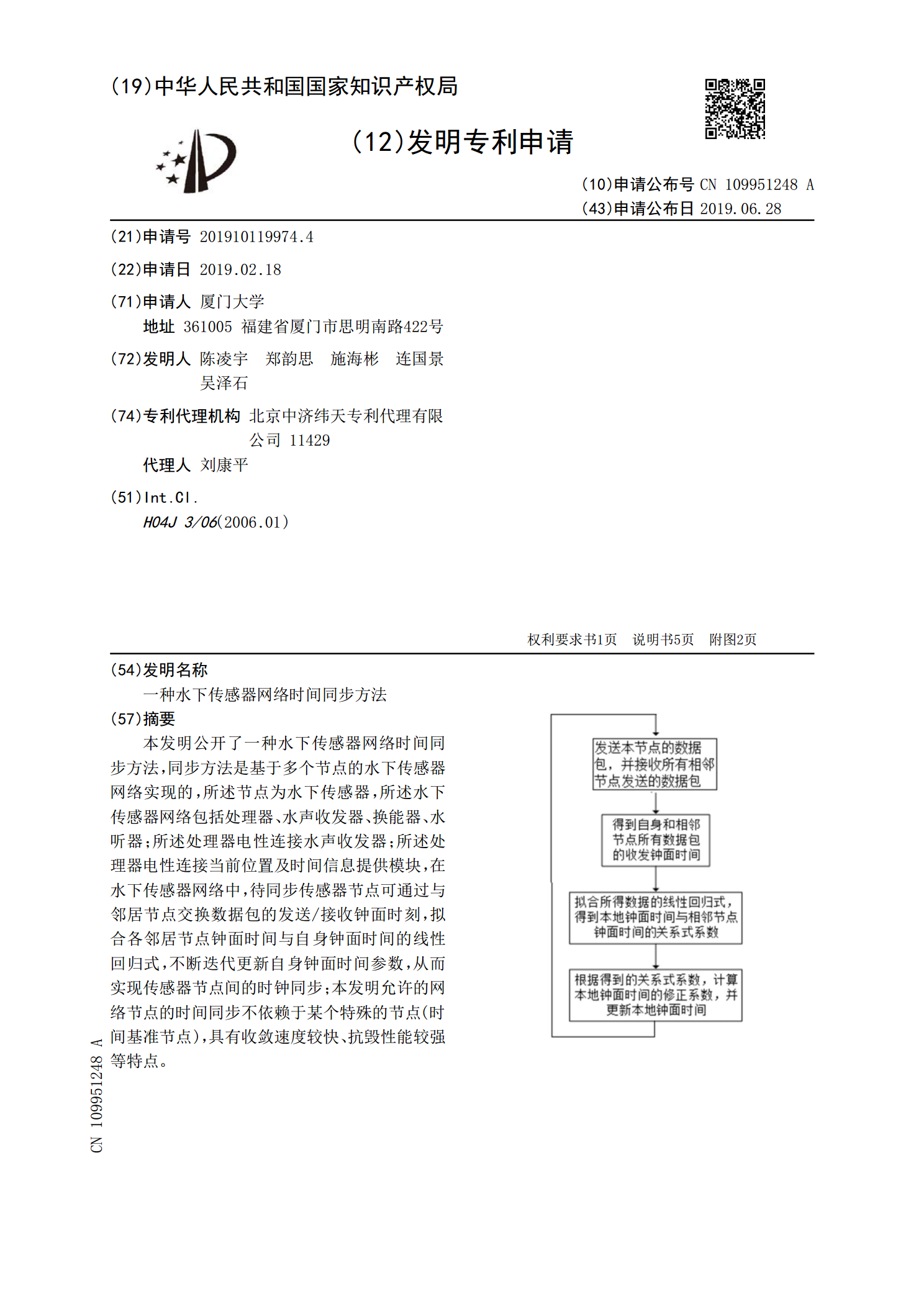
本发明公开了一种水下传感器网络时间同步方法,同步方法是基于多个节点的水下传感器网络实现的,所述节点为水下传感器,所述水下传感器网络包括处理器、水声收发器、换能器、水听器;所述处理器电性连接水声收发器;所述处理器电性连接当前位置及时间信息提供模块,在水下传感器网络中,待同步传感器节点可通过与邻居节点交换数据包的发送/接收钟面时刻,拟合各邻居节点钟面时间与自身钟面时间的线性回归式,不断迭代更新自身钟面时间参数,从而实现传感器节点间的时钟同步;本发明允许的网络节点的时间同步不依赖于某个特殊的节点(时间基准节点)
水下传感器网络的时间同步方法和系统.pdf
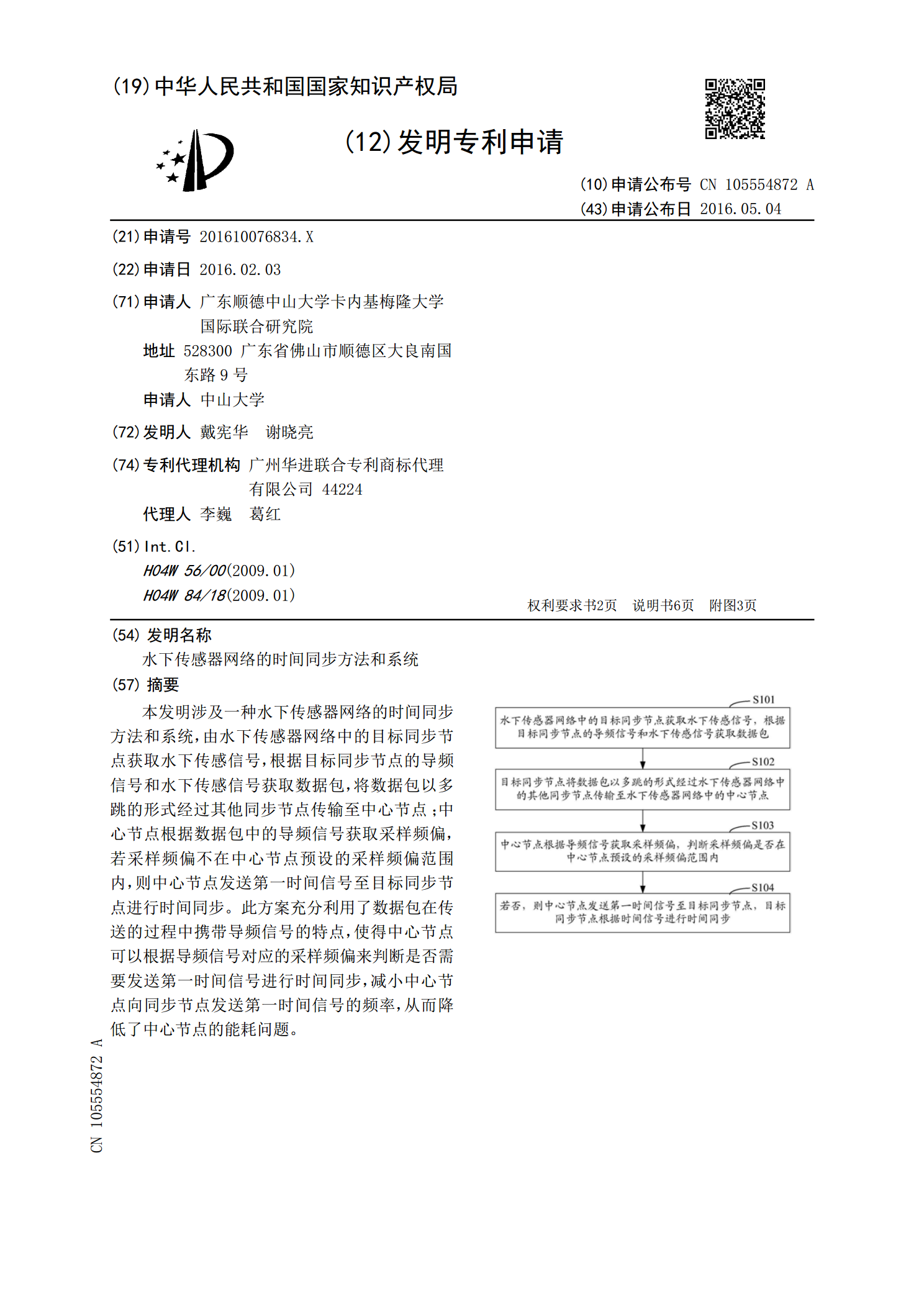
本发明涉及一种水下传感器网络的时间同步方法和系统,由水下传感器网络中的目标同步节点获取水下传感信号,根据目标同步节点的导频信号和水下传感信号获取数据包,将数据包以多跳的形式经过其他同步节点传输至中心节点;中心节点根据数据包中的导频信号获取采样频偏,若采样频偏不在中心节点预设的采样频偏范围内,则中心节点发送第一时间信号至目标同步节点进行时间同步。此方案充分利用了数据包在传送的过程中携带导频信号的特点,使得中心节点可以根据导频信号对应的采样频偏来判断是否需要发送第一时间信号进行时间同步,减小中心节点向同步节点

水下传感器网络时间同步技术综述.docx
水下传感器网络时间同步技术综述水下传感器网络(UnderwaterSensorNetwork,USN)是指将多个水下传感器节点互相连接起来,形成一个实时监测、控制和数据传输的网络。在水下环境中,由于水的特性和水下传感器节点的特殊性质,传输效率、数据可靠性、节点能量供给等都是制约传感器网络发展的关键因素。在水下传感器网络中,时间同步技术起到了关键作用。因为水下传感器节点不存在GPS定位这样的卫星对时信号,所以在同步时需要进行相应的改进。本文将从以下几个方面,系统地分析水下传感器网络时间同步技术研究现状和未来

一种无线传感器网络时间同步方法.pdf
本发明公开了一种无线传感器网络时间同步方法,属于无线传感器网络技术领域。本发明的方法为:1)中心节点以设定的时间间隔向网络广播同步信息,启动同步过程;2)传感器节点收到同步信息后,与该同步信息的来源节点进行时间同步,并在信道空闲时向网络广播自己的同步信息;3)在每一次同步过程结束后,传感器节点采用温特斯法预测自身配置的晶体振荡器在当前周期内的工作频率,并根据预测结果校准自己的逻辑时间,直至下一轮同步过程开始为止。与现有技术相比,本发明可以大幅地延长周期同步的时间间隔,显著地降低同步开销和对无线信道的占用,