
一种基于外弹道毫米波测速雷达信号实时处理系统及方法.pdf

美丽****ka


1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于外弹道毫米波测速雷达信号实时处理系统及方法.pdf
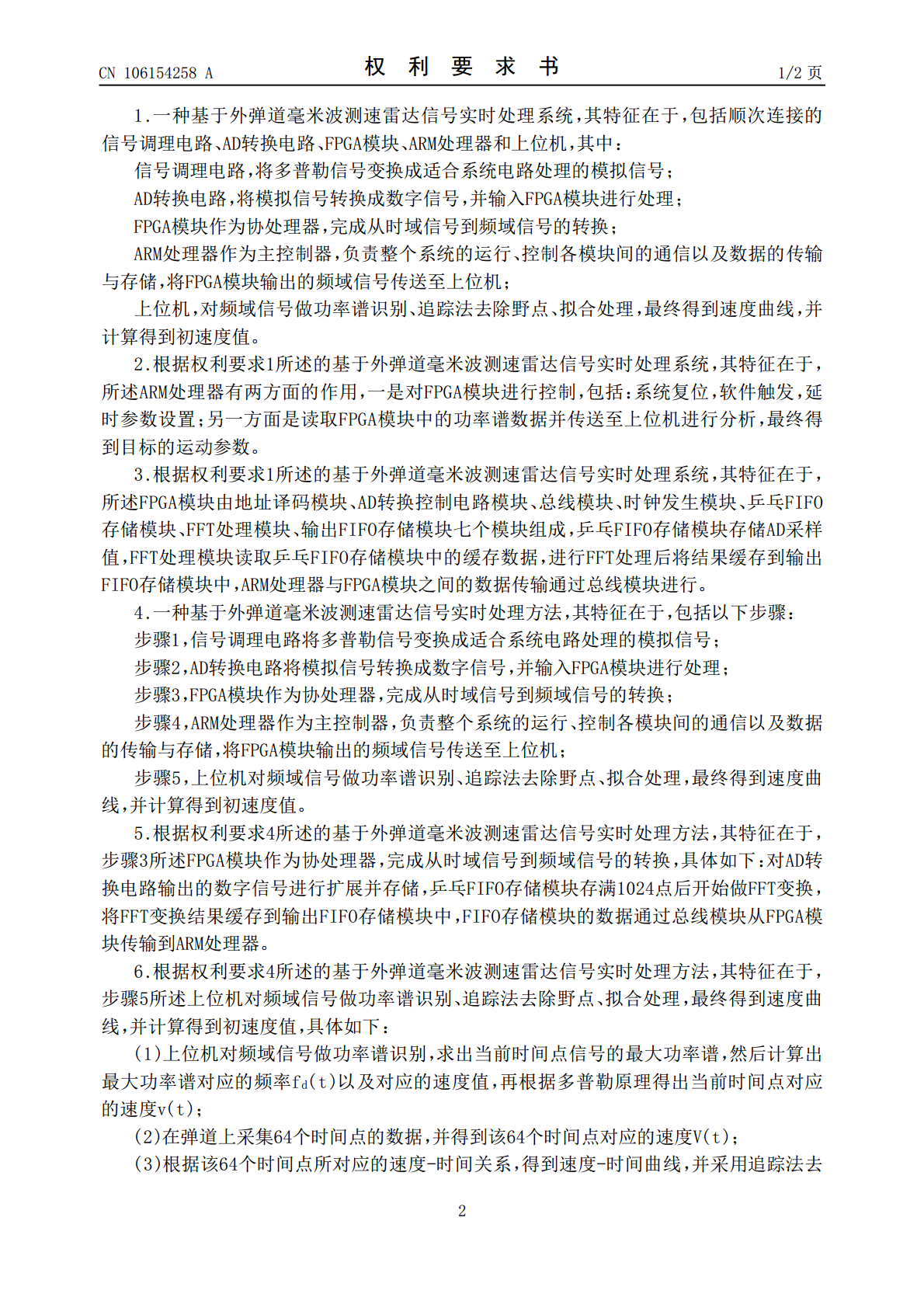
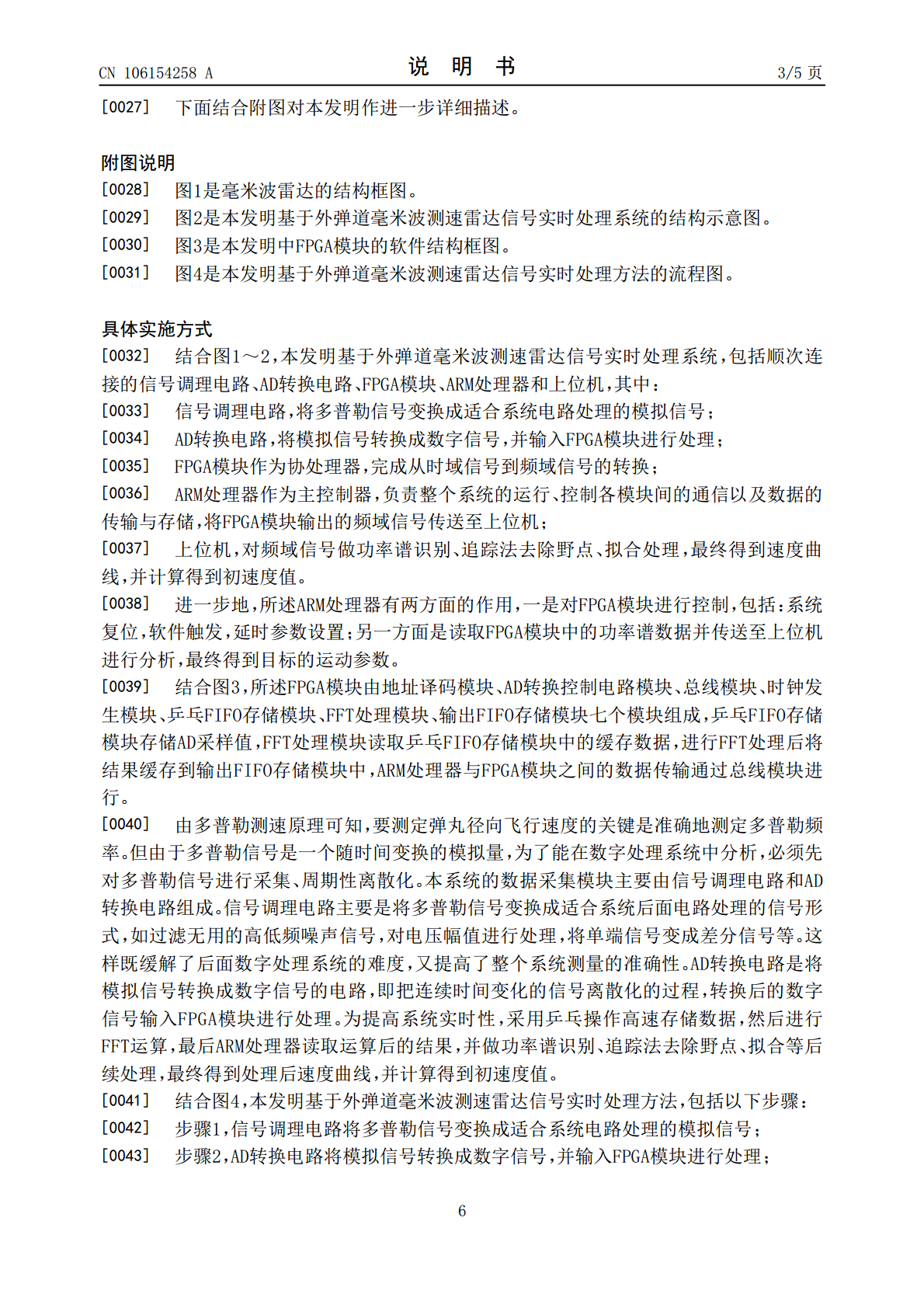
本发明公开了一种基于外弹道毫米波测速雷达信号实时处理系统,包括顺次连接的信号调理电路、AD转换电路、FPGA模块、ARM处理器和上位机,其中:信号调理电路,将多普勒信号变换成适合系统电路处理的模拟信号;AD转换电路,将模拟信号转换成数字信号,并输入FPGA模块进行处理;FPGA模块作为协处理器,完成从时域信号到频域信号的转换;ARM处理器作为主控制器,负责整个系统的运行、控制各模块间的通信以及数据的传输与存储,将FPGA模块输出的频域信号传送至上位机;上位机,对频域信号做功率谱识别、追踪法去除野点、拟合处

弹道测速雷达微弱信号处理方法研究的综述报告.docx
弹道测速雷达微弱信号处理方法研究的综述报告弹道测速雷达是一种用于从高速飞行目标中获取速度、距离和弹道信息的重要工具。因为目标在高速运动中,所以雷达采集到的信号非常微弱,并且噪声干扰也很大。因此,为了有效地提取目标信号并准确测量其弹道信息,需要采用许多信号处理方法。本文将综述一些近年来在弹道测速雷达微弱信号处理方面的研究进展。一、信号预处理由于雷达采集到的信号通常存在较多的噪声和杂波,因此需要对原始信号进行预处理。最常用的预处理方法是滤波。滤波器可以抑制噪声和干扰信号,提高信号噪声比。根据滤波器的类型和特性
一种毫米波雷达信号处理系统及方法.pdf
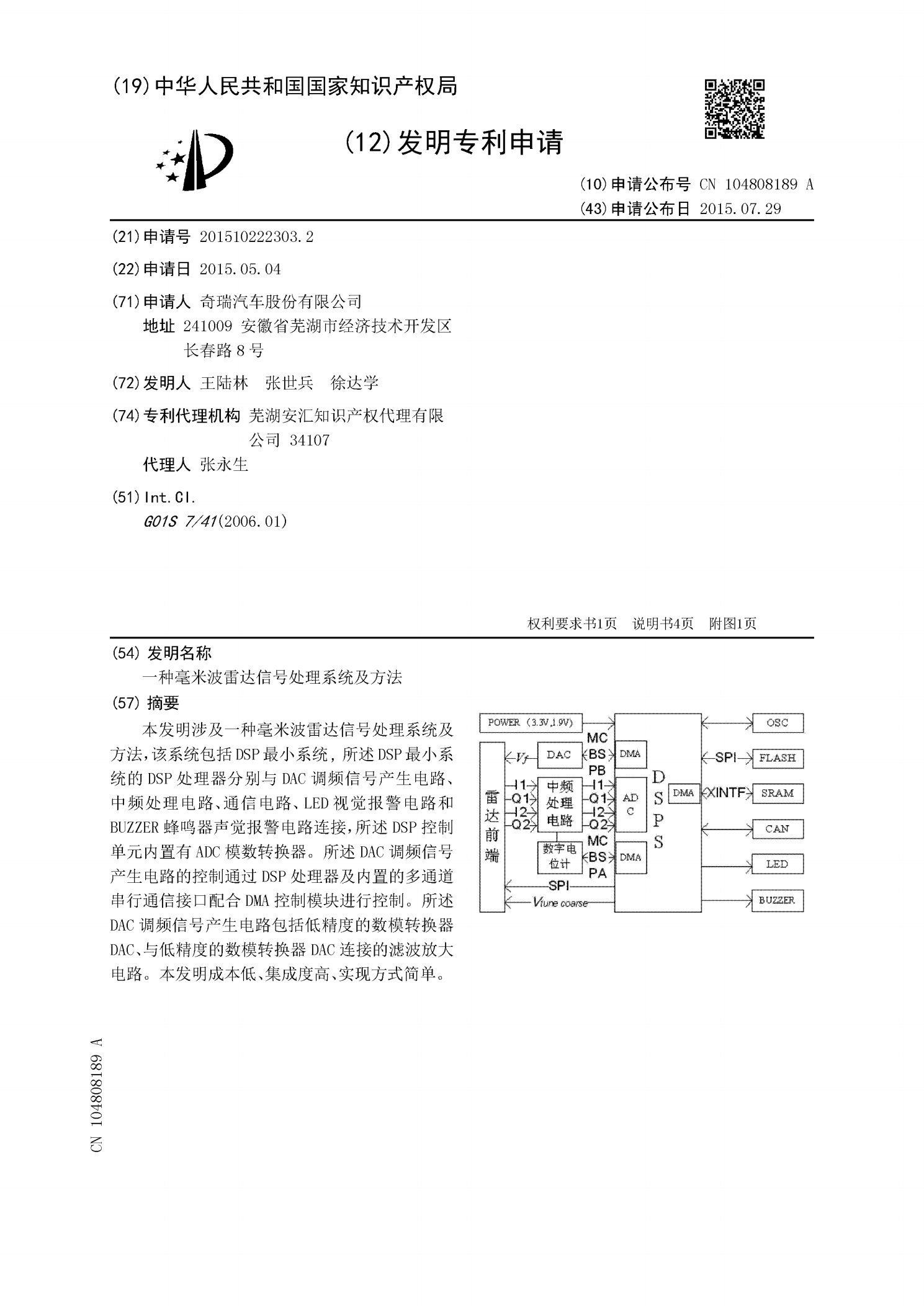
本发明涉及一种毫米波雷达信号处理系统及方法,该系统包括DSP最小系统,所述DSP最小系统的DSP处理器分别与DAC调频信号产生电路、中频处理电路、通信电路、LED视觉报警电路和BUZZER蜂鸣器声觉报警电路连接,所述DSP控制单元内置有ADC模数转换器。所述DAC调频信号产生电路的控制通过DSP处理器及内置的多通道串行通信接口配合DMA控制模块进行控制。所述DAC调频信号产生电路包括低精度的数模转换器DAC、与低精度的数模转换器DAC连接的滤波放大电路。本发明成本低、集成度高、实现方式简单。

基于SOPC的测速雷达多普勒信号处理系统设计的任务书.docx
基于SOPC的测速雷达多普勒信号处理系统设计的任务书一、项目简介本项目是基于SOPC的测速雷达多普勒信号处理系统设计。测速雷达是一种广泛应用于交通控制、研究、医疗、运动测量等领域的技术。其量测原理是通过测量物体反射回来的电磁波的频率变化来计算物体的速度。本项目旨在设计一个测速雷达的信号处理系统,以实现对多普勒幅度和频率的精确计算和分析。该系统可应用于各种领域,如安防、物流、运动测量等,具有重要的应用价值。二、项目任务1.确定系统需求根据测速雷达的测速原理,确定系统对多普勒信号的采集、分析和处理等需求,以及

一种基于线阵的弹道目标回波信号模拟方法.pdf
本发明公开了一种基于线阵的弹道目标回波信号模拟方法,首先确定模拟器天线单元阵列的位置、架设高度、长度、单元间距和单元数,以及各天线单元对雷达天线中心的仰角;通过射频电子开关选择对应仰角的模拟器天线单元,接收雷达辐射信号;经混频滤波处理后送入A/D器件实现数字化;然后对下变频处理得到数字基带信号进行多普勒调制和数字延时,处理后进行数字上变频和数模转换,得到的模拟中频回波信号进行变频放大处理,之后选择目标轨迹对应仰角位置的天线单元实现模拟射频回波信号辐射。本发明利用天线阵列单元以及数字信号处理技术,能够真实模