
基于四极化通道融合的海面漂浮微弱雷达目标的检测方法.pdf

猫巷****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于四极化通道融合的海面漂浮微弱雷达目标的检测方法.pdf
本发明公开了一种基于四极化通道融合的海面漂浮微弱雷达目标的检测方法,思路为:分别获取检测单元N维接收向量的四个极化通道的平均回波幅度和第p个参考单元中N'维接收向量的四个极化通道的平均回波幅度,进而分别计算检测单元N维接收向量的四个极化通道的融合多普勒谱和第p个参考单元N'维接收向量的四个极化通道的融合多普勒谱;然后分别计算检测单元N维接收向量的四个极化通道融合的相对P个参考单元的多普勒谱峰高和P个参考单元N'维接收向量的四个极化通道融合的相对多普勒峰高;获取检测单元N维接收向量的组合特征和参考单元N'维
基于极化多特征的对海面漂浮雷达目标的检测方法.pdf
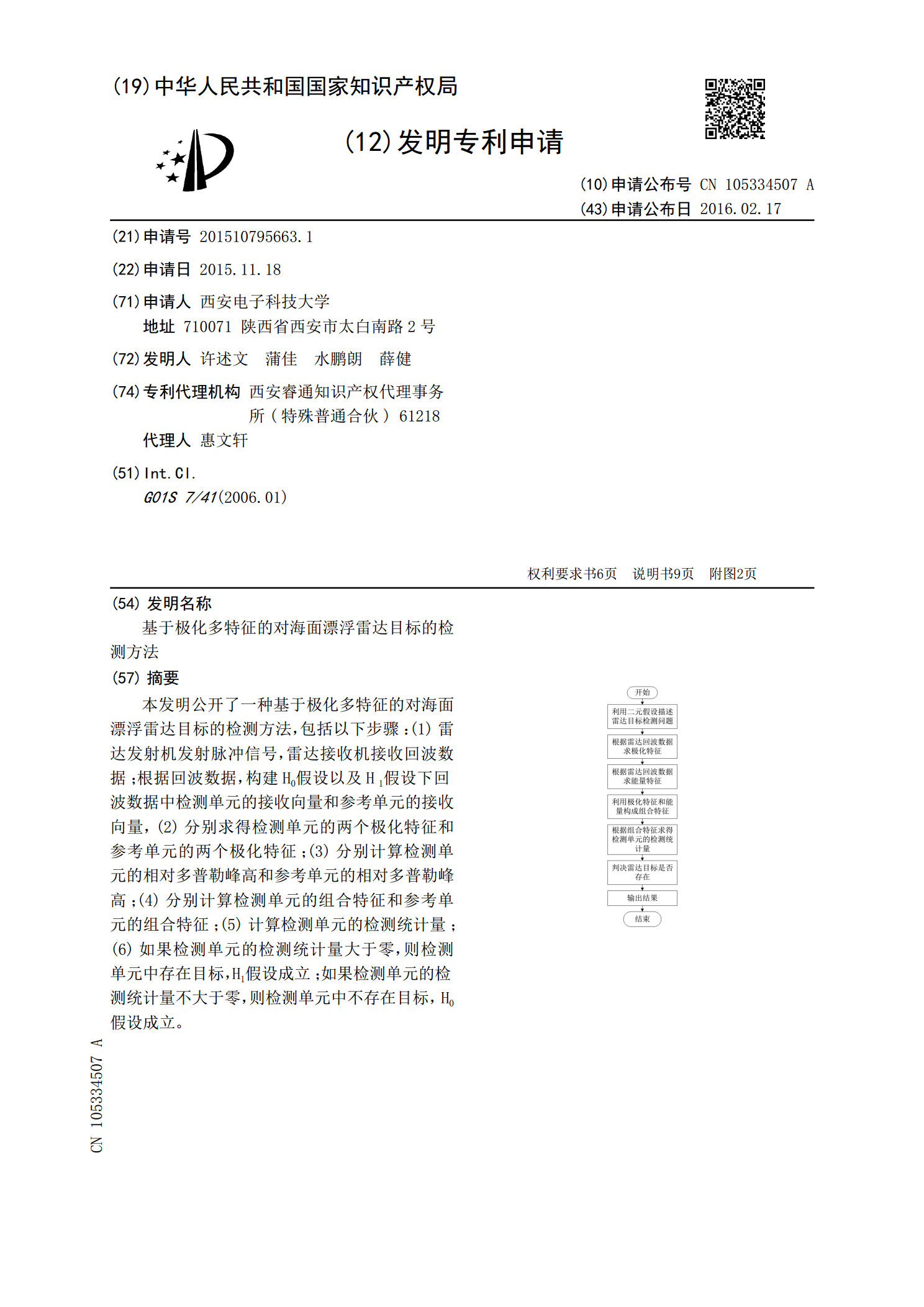
本发明公开了一种基于极化多特征的对海面漂浮雷达目标的检测方法,包括以下步骤:(1)雷达发射机发射脉冲信号,雷达接收机接收回波数据;根据回波数据,构建H0假设以及H1假设下回波数据中检测单元的接收向量和参考单元的接收向量,(2)分别求得检测单元的两个极化特征和参考单元的两个极化特征;(3)分别计算检测单元的相对多普勒峰高和参考单元的相对多普勒峰高;(4)分别计算检测单元的组合特征和参考单元的组合特征;(5)计算检测单元的检测统计量;(6)如果检测单元的检测统计量大于零,则检测单元中存在目标,H1假设成立;如

海面漂浮类微弱目标检测方法.pdf
本发明公开的一种海面漂浮类微弱目标检测方法,旨在克服海面漂浮类微弱目标在时域、频域都被强海杂波淹没使得传统的检测算法无能为力的问题。本发明通过下述技术方案予以实现:首先,雷达信号处理系统接收到某一方位上的一个脉冲回波数据,通过Log‑t/CFAR检测器去掉噪声和大量的低能量海杂波;然后,对相邻N帧数据进行两次门限判决,采用带径向速度的M/N检测技术进行联合N帧M/N处理,舍弃未过门限的数据,保留过门限的数据;沿着已过门限的M/N积累路径回调出N帧原始数据,并提取N帧原始数据的特征,再根据这些特征进行特征域

基于粒子滤波的微弱雷达目标检测方法.doc
基于粒子滤波的微弱雷达目标检测方法机动微弱目标检测是雷达信号处理领域面临的严峻挑战之一。当目标回波信噪比过低,基于单帧数据的相干或非相干累积方法无法保证可靠检测时,可采用检测前跟踪技术。检测前跟踪技术是一种长时间信号累积方法,通过联合处理多帧观测数据同时实现目标检测和跟踪。但早期的基于动态规划、Hough变换以及最大似然估计的检测前跟踪算法仅适合处理近似直线运动的目标。粒子滤波器(算法)解决统计特性已知的非线性、非高斯问题具有现有算法无可比拟的优势,而代价参考粒子滤波器(算法)具有处理统计特性未知的非线性

一种基于极化SAR数据融合的海面溢油分割方法.pdf
本发明公开了合成孔径雷达海洋遥感应用技术领域中的一种极化SAR数据融合的海面溢油图像分割方法。该方法首先构造基于分割区域最大后验概率准则的活动轮廓能量泛函,并将分割区域的分布表示成Gibbs先验概率模型,然后将活动轮廓模型嵌入到高维的水平集函数中,利用Euler-Lagrange公式得到发展方程,模型中包含CFAR边缘检测加权的边界长度项和融合数据统计距离项。同时,本发明提出了确定演化参数的方法,结合油膜衰减特性初始化的水平集函数,通过方程演化得到分割结果。发明可以有效的融合各种SAR、极化SAR数据,实