
一种基于X波段多普勒雷达降水估测系统及方法.pdf

小新****ou


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于X波段多普勒雷达降水估测系统及方法.pdf
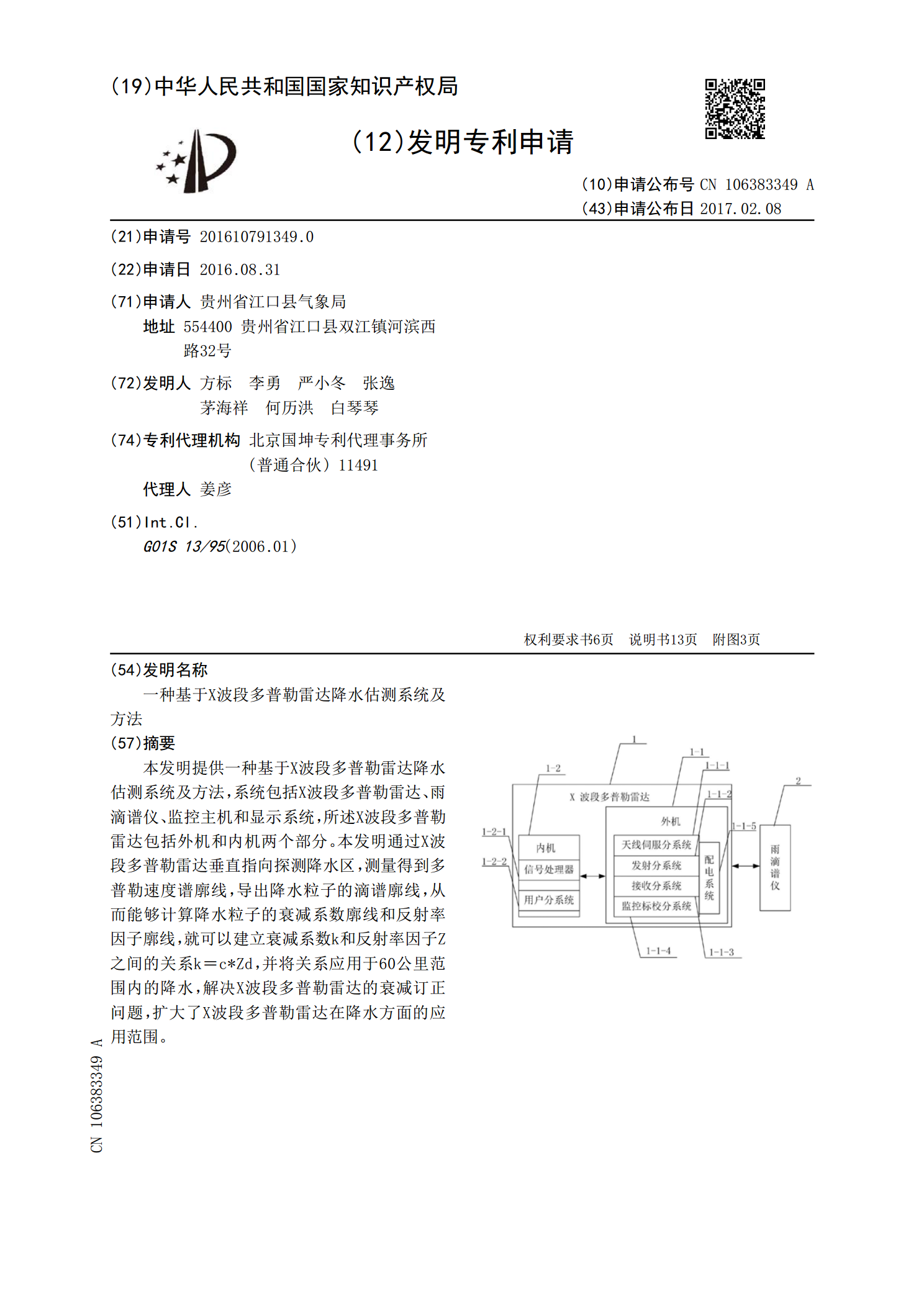
本发明提供一种基于X波段多普勒雷达降水估测系统及方法,系统包括X波段多普勒雷达、雨滴谱仪、监控主机和显示系统,所述X波段多普勒雷达包括外机和内机两个部分。本发明通过X波段多普勒雷达垂直指向探测降水区,测量得到多普勒速度谱廓线,导出降水粒子的滴谱廓线,从而能够计算降水粒子的衰减系数廓线和反射率因子廓线,就可以建立衰减系数k和反射率因子Z之间的关系k=c*Zd,并将关系应用于60公里范围内的降水,解决X波段多普勒雷达的衰减订正问题,扩大了X波段多普勒雷达在降水方面的应用范围。
一种基于S波段双偏振天气雷达降水估测方法.pdf
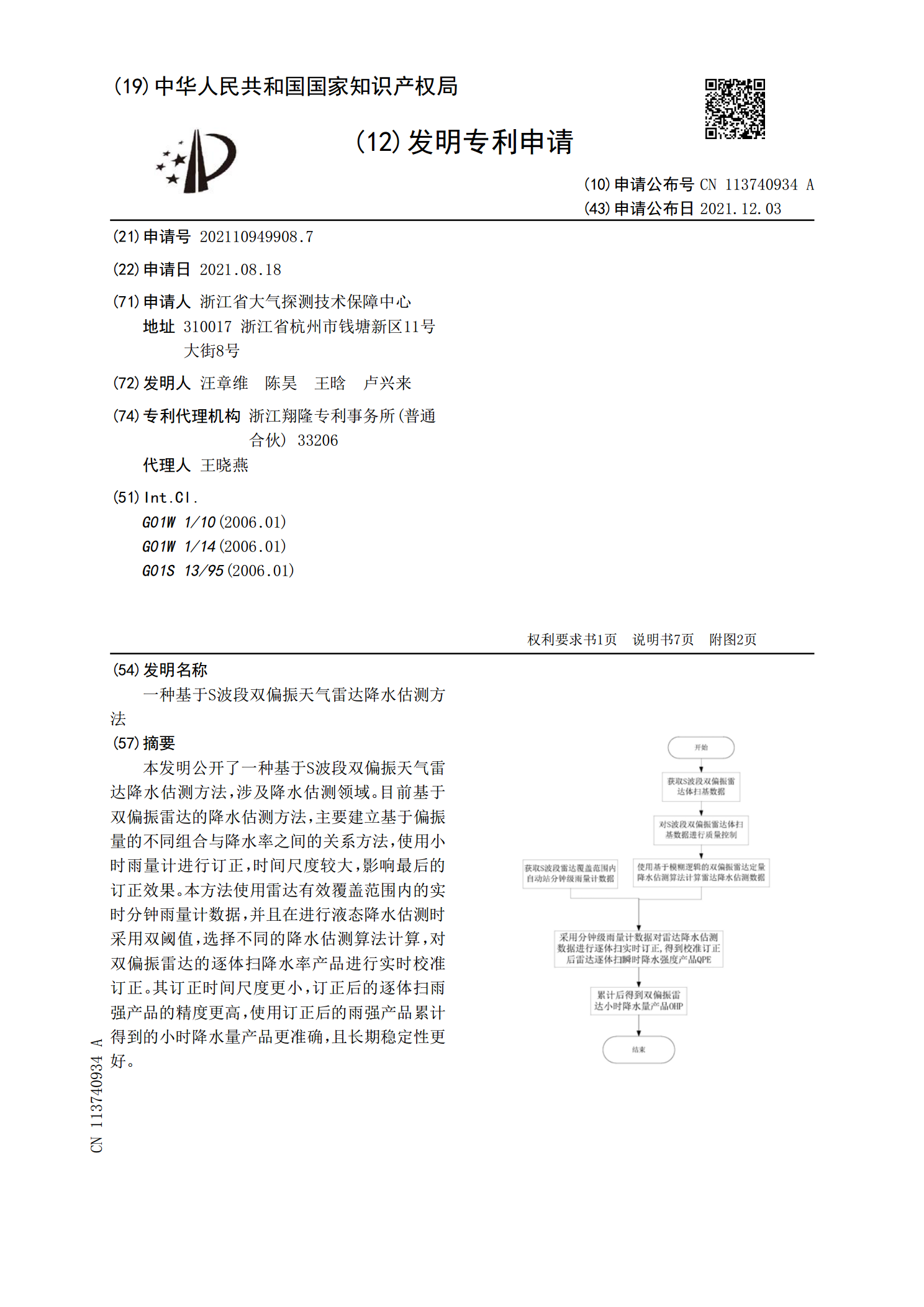
本发明公开了一种基于S波段双偏振天气雷达降水估测方法,涉及降水估测领域。目前基于双偏振雷达的降水估测方法,主要建立基于偏振量的不同组合与降水率之间的关系方法,使用小时雨量计进行订正,时间尺度较大,影响最后的订正效果。本方法使用雷达有效覆盖范围内的实时分钟雨量计数据,并且在进行液态降水估测时采用双阈值,选择不同的降水估测算法计算,对双偏振雷达的逐体扫降水率产品进行实时校准订正。其订正时间尺度更小,订正后的逐体扫雨强产品的精度更高,使用订正后的雨强产品累计得到的小时降水量产品更准确,且长期稳定性更好。

基于X波段双偏振多普勒天气雷达降水观测的中期报告.docx
基于X波段双偏振多普勒天气雷达降水观测的中期报告1.研究背景和意义天气雷达是一种用于监测降水的重要工具。其中,双偏振雷达在降水分类、雷暴监测等方面具有优势。与传统的单偏振雷达相比,双偏振雷达可以同时获取水平和垂直方向的信息,提高了降水探测的精度和准确性。X波段双偏振多普勒天气雷达具有高分辨率、高频率等优势,能够有效地观测小到0.5毫米的降水。因此,基于X波段双偏振多普勒天气雷达降水观测的中期研究对于改进降水预测和水资源管理具有重要意义。2.研究内容本次中期报告主要围绕以下内容进行研究:1)基于X波段双偏振

基于X波段双偏振多普勒天气雷达降水观测的任务书.docx
基于X波段双偏振多普勒天气雷达降水观测的任务书1.任务目标和背景随着天气预报和气象灾害防控工作的不断推进,需要采用先进的技术手段来进行天气预报和灾害防控。而X波段双偏振多普勒天气雷达则是一种较为先进的技术手段,它能够提供高质量的降水观测,是天气预报和灾害防控工作中必不可少的工具。因此,本次任务的目标是基于X波段双偏振多普勒天气雷达进行降水观测,并提高降水观测的精度和可靠性,以为天气预报和灾害防控提供高质量的数据支持。2.任务内容和方法(1)X波段双偏振多普勒天气雷达的原理和应用分析首先,本次任务需要对X波

一种X波段双线偏振多普勒天气雷达系统.pdf
一种X波段双线偏振多普勒天气雷达系统,包括外机和内机两个部分,所述的外机部分包括天线伺服分系统、发射分系统、接收分系统、监控标校分系统、配电系统;所述的内机部分包括信号处理器、用户分系统。本发明采用独创的信号链路设计,减小了设备量,提高了系统的可靠性;采用多通道信号处理的方式,实现双线多普勒天气雷达所有参量的同时测量,提高了探测数据的时效性;采用基于GPU信号处理技术,提高了双线信号处理能力;采用独特的双通道全路径收发标校技术,减小了雷达系统的双通道收发系统误差,为提高探测数据质量提供了有效保证。