
一种基于距离‑多普勒量测的多站雷达人体跟踪方法.pdf

一条****贺6

1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于距离‑多普勒量测的多站雷达人体跟踪方法.pdf
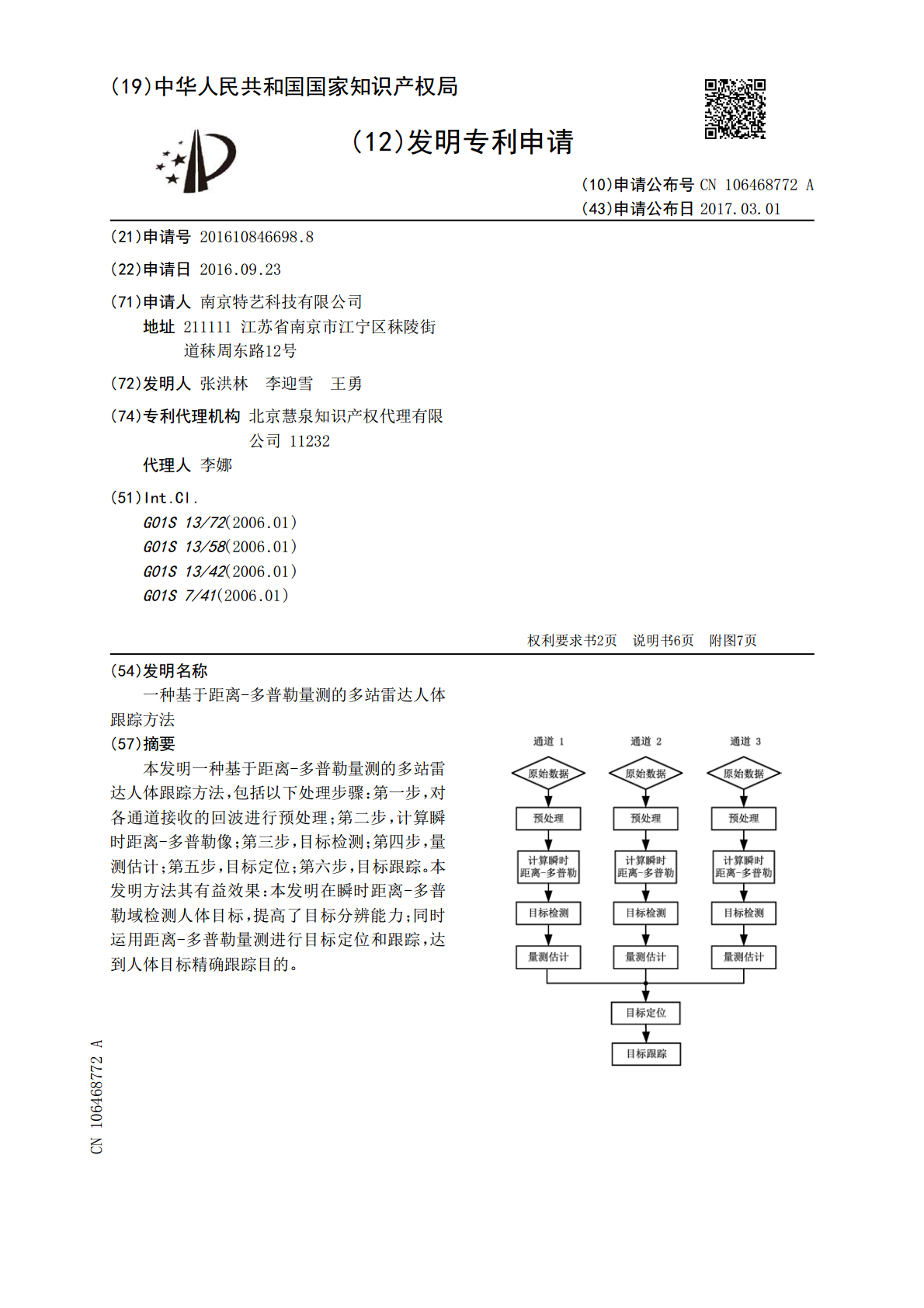
本发明一种基于距离‑多普勒量测的多站雷达人体跟踪方法,包括以下处理步骤:第一步,对各通道接收的回波进行预处理;第二步,计算瞬时距离‑多普勒像;第三步,目标检测;第四步,量测估计;第五步,目标定位;第六步,目标跟踪。本发明方法其有益效果:本发明在瞬时距离‑多普勒域检测人体目标,提高了目标分辨能力;同时运用距离‑多普勒量测进行目标定位和跟踪,达到人体目标精确跟踪目的。
一种基于距离-多普勒量测的跟踪滤波方法及装置.pdf
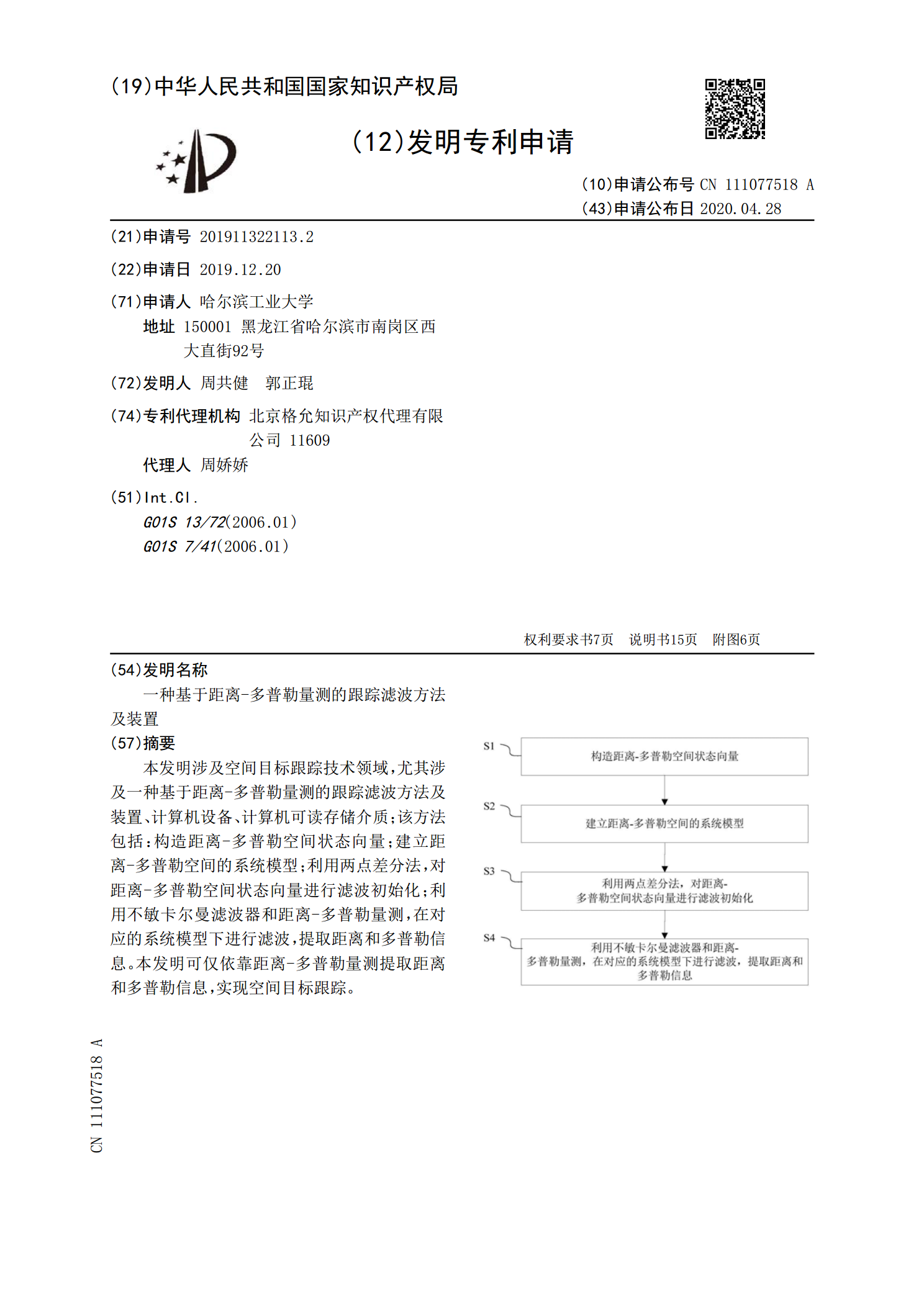
本发明涉及空间目标跟踪技术领域,尤其涉及一种基于距离‑多普勒量测的跟踪滤波方法及装置、计算机设备、计算机可读存储介质;该方法包括:构造距离‑多普勒空间状态向量;建立距离‑多普勒空间的系统模型;利用两点差分法,对距离‑多普勒空间状态向量进行滤波初始化;利用不敏卡尔曼滤波器和距离‑多普勒量测,在对应的系统模型下进行滤波,提取距离和多普勒信息。本发明可仅依靠距离‑多普勒量测提取距离和多普勒信息,实现空间目标跟踪。

一种基于多普勒量测自适应处理的雷达目标跟踪方法.pdf
本发明属于多普勒雷达目标跟踪领域,特别涉及一种基于多普勒量测自适应处理的雷达目标跟踪方法。本发明基于BLUE‑KF的位置量测滤波方法和自适应伪信息的选取,实现可处理多普勒量测的序贯滤波。其中,基于BLUE‑KF方法的位置量测滤波方法实现了基于预测值量测转换的无偏估计;同时利用基于预测值的转换伪量测,获得伪状态的无偏估计。在此基础上,基于伪量测误差协方差与伪状态估计误差协方差的差异度变化率自适应地选取转换伪量测或伪状态估计进行序贯滤波。本发明在系统能够同时获得目标位置量测和多普勒量测的情况下,实现对目标非线

一种基于预测值量测转换的多普勒雷达目标跟踪方法.pdf
本发明公开了一种基于预测值量测转换的多普勒雷达目标跟踪方法。本发明首先求解位置预测值的转换量测误差的均值和协方差;再将基于直角坐标系下的位置预测值的转换量测误差的协方差阵应用到标准卡尔曼滤波算法中,即可得到基于预测位置的量测转换卡尔曼滤波算法,通过该算法进行目标位置估计,得到目标的估计位置。最后,使用多普勒信息和目标的估计位置使用二阶EKF变换,进行递推序贯卡尔曼滤波,完成目标跟踪。本发明用于雷达目标跟踪,能利用多普勒信息提升跟踪精度,且运算量一定。

一种基于多站雷达微多普勒运动测向的人体行为分类方法.pdf
本发明公开的一种基于多站雷达微多普勒运动测向的人体行为分类方法,属于雷达目标探测信号处理领域。本发明实现方法为:通过利用基于多站雷达多普勒频率的人体运动方向估计方法,实时测量人体运动相对于不同雷达接收机的方位角。根据测量的角度值和不同方位角对分类性能影响的不同对多站数据进行区间划分,并依据划分的区间进行数据级融合,利用双通道的卷积主成分分析网络CPCAN对不同区间的数据进行特征提取与分类,将两个通道的分类结果进行自适应加权的决策级融合得到最终的行为类别结果。本发明通过充分考虑运动方位变化带来的微多普勒数据