
一种宽带雷达空间锥体目标的干涉式三维成像与微动特征提取方法.pdf

森林****来了


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种宽带雷达空间锥体目标的干涉式三维成像与微动特征提取方法.pdf
本发明针对已有单基以及双/多基雷达方法难以获取目标真实三维像与三维微动特征,系统实现复杂这一问题,将干涉式逆合成孔径雷达(InISAR)中多天线干涉处理的思想引入到空间锥体目标三维成像与三维微动特征提取研究中,提出一种宽带雷达空间锥体目标的干涉式三维成像与微动特征提取方法,将微多普勒效应理论与多天线干涉处理技术相结合,利用距离‑慢时间像实现了空间锥体目标真实三维成像,获取了与目标的物理尺寸一致,能够反映散射点每个瞬时时刻真实三维散射分布信息的坐标值,并在此基础是精确求解目标微动参数与结构参数。经过实例仿真

一种空间微动目标宽带雷达干涉三维成像方法.docx
一种空间微动目标宽带雷达干涉三维成像方法空间微动目标宽带雷达干涉三维成像方法摘要:在现代雷达领域中,空间微动目标的探测和成像一直是一个难题。传统的雷达成像方法对于空间微动目标的成像效果较差,难以获得高质量的图像信息。本文提出了一种基于宽带雷达干涉的三维成像方法,该方法可以有效地解决空间微动目标的成像问题。通过将宽带雷达干涉技术与三维成像技术相结合,可以提高雷达成像的分辨率和精度,并获得更多的目标信息。实验证明,该方法可以有效地应用于空间微动目标的成像领域,具有较好的成像效果。关键词:宽带雷达干涉;三维成像

基于时变三维坐标重构的空间锥体目标微动特征提取方法.docx
基于时变三维坐标重构的空间锥体目标微动特征提取方法基于时变三维坐标重构的空间锥体目标微动特征提取方法摘要:随着目标监测技术的不断发展和应用领域的不断扩展,对于目标的微小运动特征的提取和分析也变得越来越重要。本文提出了一种基于时变三维坐标重构的空间锥体目标微动特征提取方法。该方法通过利用图像序列中的目标信息和时变三维坐标重构技术,实现了对目标微动特征的准确提取和分析。实验结果表明,该方法能够有效地识别和分析目标的微动特征,具有很高的准确率和稳定性。关键词:微动特征;时变三维坐标重构;空间锥体;目标监测1.引
基于进动特征提取的空间锥体目标ISAR三维成像方法.pdf
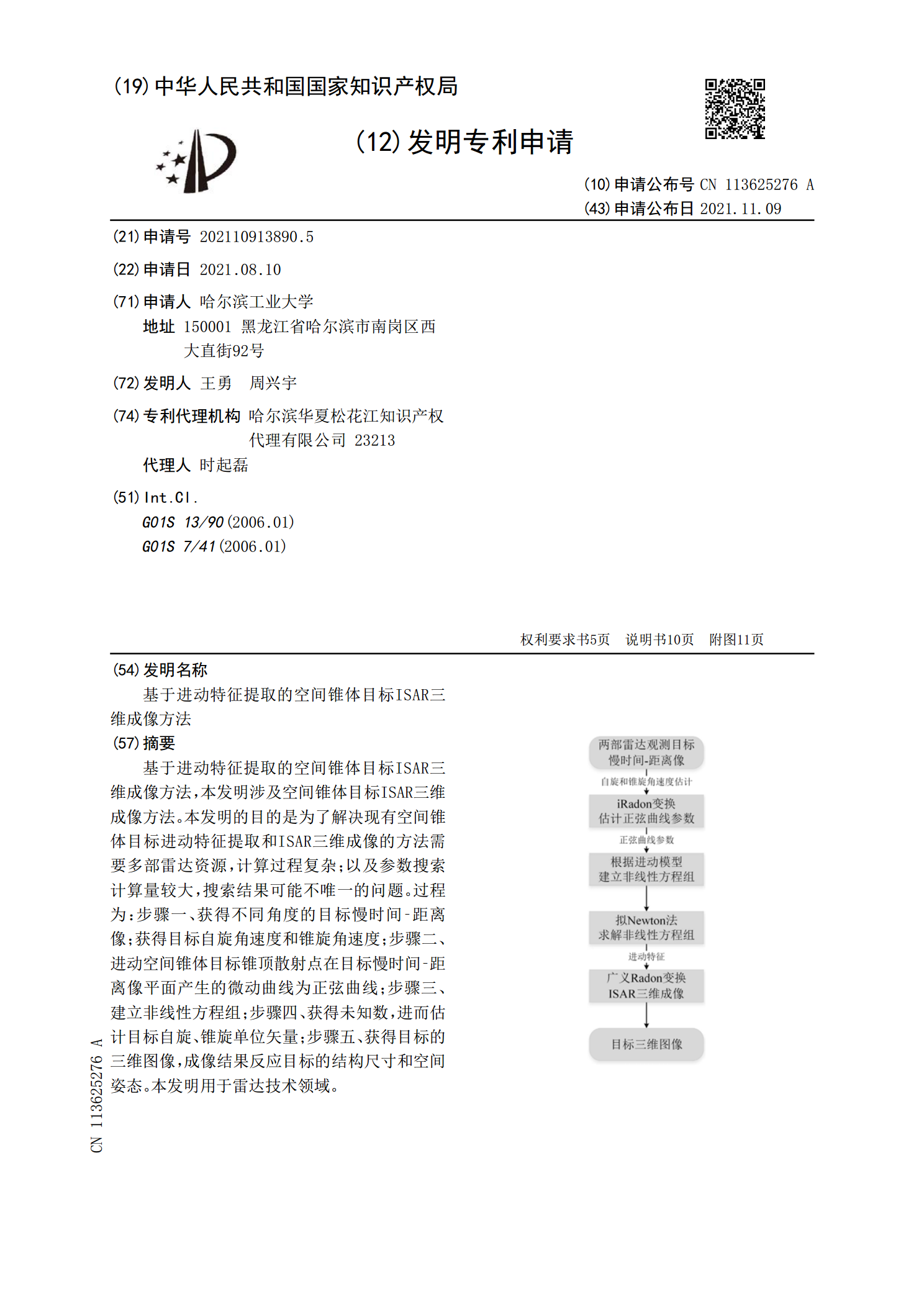
基于进动特征提取的空间锥体目标ISAR三维成像方法,本发明涉及空间锥体目标ISAR三维成像方法。本发明的目的是为了解决现有空间锥体目标进动特征提取和ISAR三维成像的方法需要多部雷达资源,计算过程复杂;以及参数搜索计算量较大,搜索结果可能不唯一的问题。过程为:步骤一、获得不同角度的目标慢时间‑距离像;获得目标自旋角速度和锥旋角速度;步骤二、进动空间锥体目标锥顶散射点在目标慢时间‑距离像平面产生的微动曲线为正弦曲线;步骤三、建立非线性方程组;步骤四、获得未知数,进而估计目标自旋、锥旋单位矢量;步骤五、获得目

基于散射中心滑动特性的双基地雷达锥体目标微动特征提取方法.docx
基于散射中心滑动特性的双基地雷达锥体目标微动特征提取方法摘要:双基地雷达系统在目标跟踪中具有很高的精度和可靠性。针对复杂环境下的目标微动特征提取问题,本文提出了一种基于散射中心滑动特性的双基地雷达锥体目标微动特征提取方法。本文首先介绍了双基地雷达系统的原理和技术特点,然后提出了散射中心滑动特性的概念及其在目标微动特征提取中的应用。接着,本文对提取目标微动特征的关键技术进行了分析,针对其中的问题提出了相应的解决方案。最后,本文通过实验验证了本文方法的有效性和实用性。关键词:双基地雷达;散射中心滑动特性;微动