
一种高速弹载雷达目标相参积累方法.pdf

努力****亚捷


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种高速弹载雷达目标相参积累方法.pdf
本发明介绍了一种高速弹载雷达目标相参积累方法,所述方法的一具体实施方式包括:计算第m个原始快时间数据,并对第m个原始快时间数据进行傅里叶变换,得到第m个原始快时间数据的频谱;根据惯导速度信息计算出速度补偿相位,并对第m个原始快时间数据的频谱进行速度补偿;将速度补偿后的第m个原始快时间数据的频谱进行逆傅里叶变换,得到第m个快时间数据;根据惯导加速度信息计算出加速度补偿相位,并对第m个快时间数据进行加速度补偿;将补偿后的各个快时间数据进行多脉冲积累得到积累信号。该实施方式通过对径向速度和径向加速度的运动补偿,

一种基于相参雷达的非相参积累方式的目标探测方法.pdf
本发明公开了一种基于相参雷达的非相参积累方式的目标探测方法,该方法包含:S1、采样得到一帧二维回波数据;S2、对S1的每个数据进行脉冲压缩;S3、对S2的数据进行距离走动校准;S4、对S3的数据进行相参积累;S5、重复S1~S4,得到多帧相参积累数据;S6、将S5得到的多帧相参积累数据进行帧间对齐;S7、将帧间对齐后的多帧相参积累数据进行非相参积累;S8、基于S7的非相参积累的数据进行目标检测。其优点是:该方法采用基于脉间自相关法实现距离走动校准,实现了对长时间相参积累的运动目标的检测;该方法将相邻多帧之
一种高速弹载雷达波形设计方法.pdf
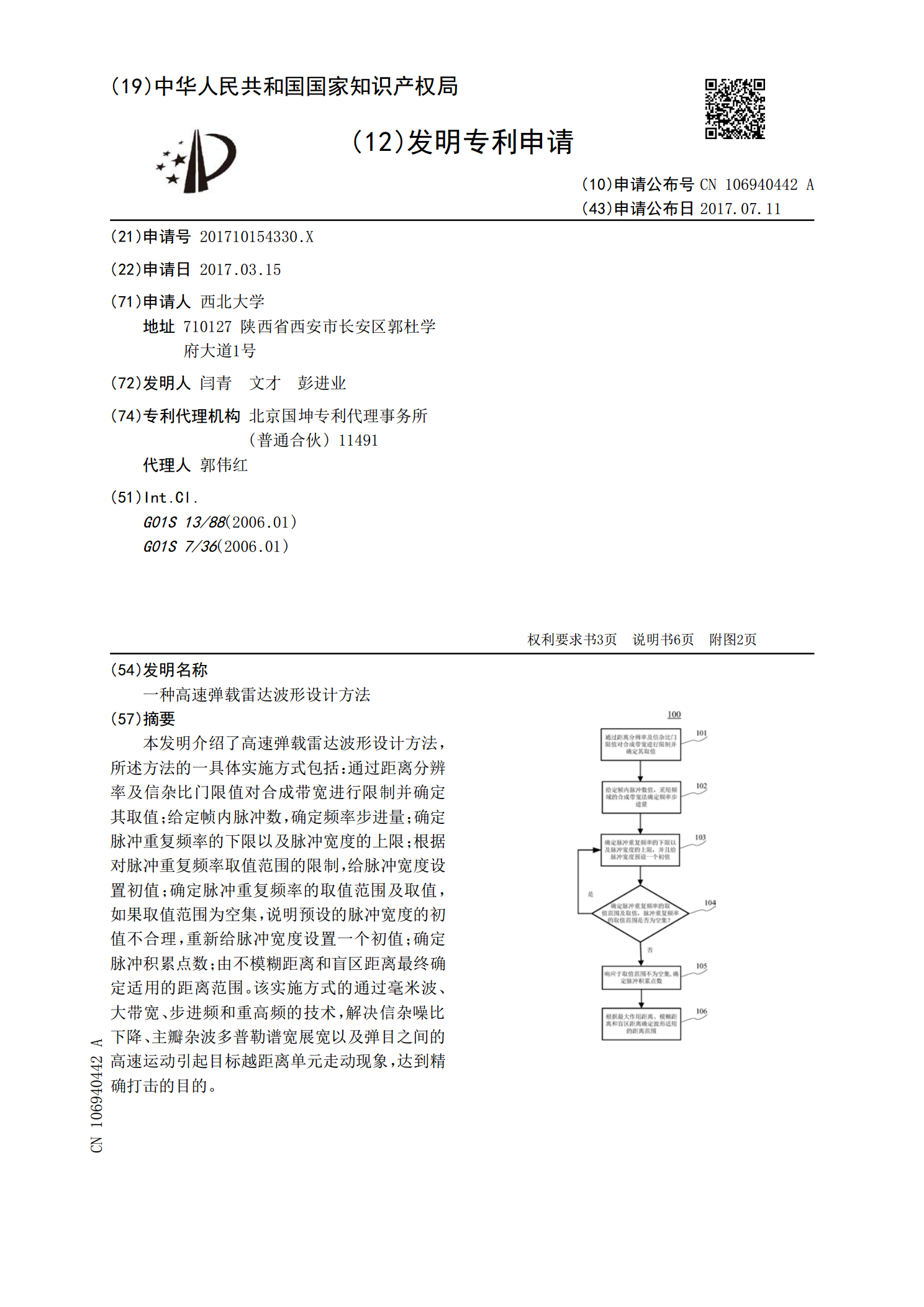
本发明介绍了高速弹载雷达波形设计方法,所述方法的一具体实施方式包括:通过距离分辨率及信杂比门限值对合成带宽进行限制并确定其取值;给定帧内脉冲数,确定频率步进量;确定脉冲重复频率的下限以及脉冲宽度的上限;根据对脉冲重复频率取值范围的限制,给脉冲宽度设置初值;确定脉冲重复频率的取值范围及取值,如果取值范围为空集,说明预设的脉冲宽度的初值不合理,重新给脉冲宽度设置一个初值;确定脉冲积累点数;由不模糊距离和盲区距离最终确定适用的距离范围。该实施方式的通过毫米波、大带宽、步进频和重高频的技术,解决信杂噪比下降、主瓣

一种基于分段补偿的高速目标相参积累检测方法.pdf
本发明涉及一种基于分段补偿的高速目标相参积累检测方法,根据雷达参数对目标速度范围进行划分;在确保段内脉冲距离走动的前提下,将积累回波脉冲组分段;对每一段脉冲根据补偿速度采用不同的滤波器进行距离补偿脉冲压缩;以补偿速度为参考对脉冲压缩数据进行多普勒修正相参积累;对所有目标速度搜索范围内的单元进行门限检测得到检测结果。

弹载雷达超高速目标检测.pptx
弹载雷达超高速目标检测目录添加章节标题弹载雷达超高速目标检测的背景和意义雷达技术的发展历程弹载雷达的应用场景和重要性当前超高速目标检测的挑战和难点论文研究的意义和价值弹载雷达超高速目标检测的基本原理和方法雷达探测原理和信号处理流程超高速目标检测算法的分类和原理常用超高速目标检测算法的比较和分析算法优化和改进的方法弹载雷达超高速目标检测的实验设计和结果分析实验场景和数据集的介绍实验方法和流程的说明实验结果的分析和比较结果优化的探讨和展望弹载雷达超高速目标检测的应用前景和展望雷达技术在军事领域的应用前景雷达技