
基于两级滤波的俯冲段大斜视SAR子孔径成像空变校正方法.pdf

St****36

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于两级滤波的俯冲段大斜视SAR子孔径成像空变校正方法.pdf
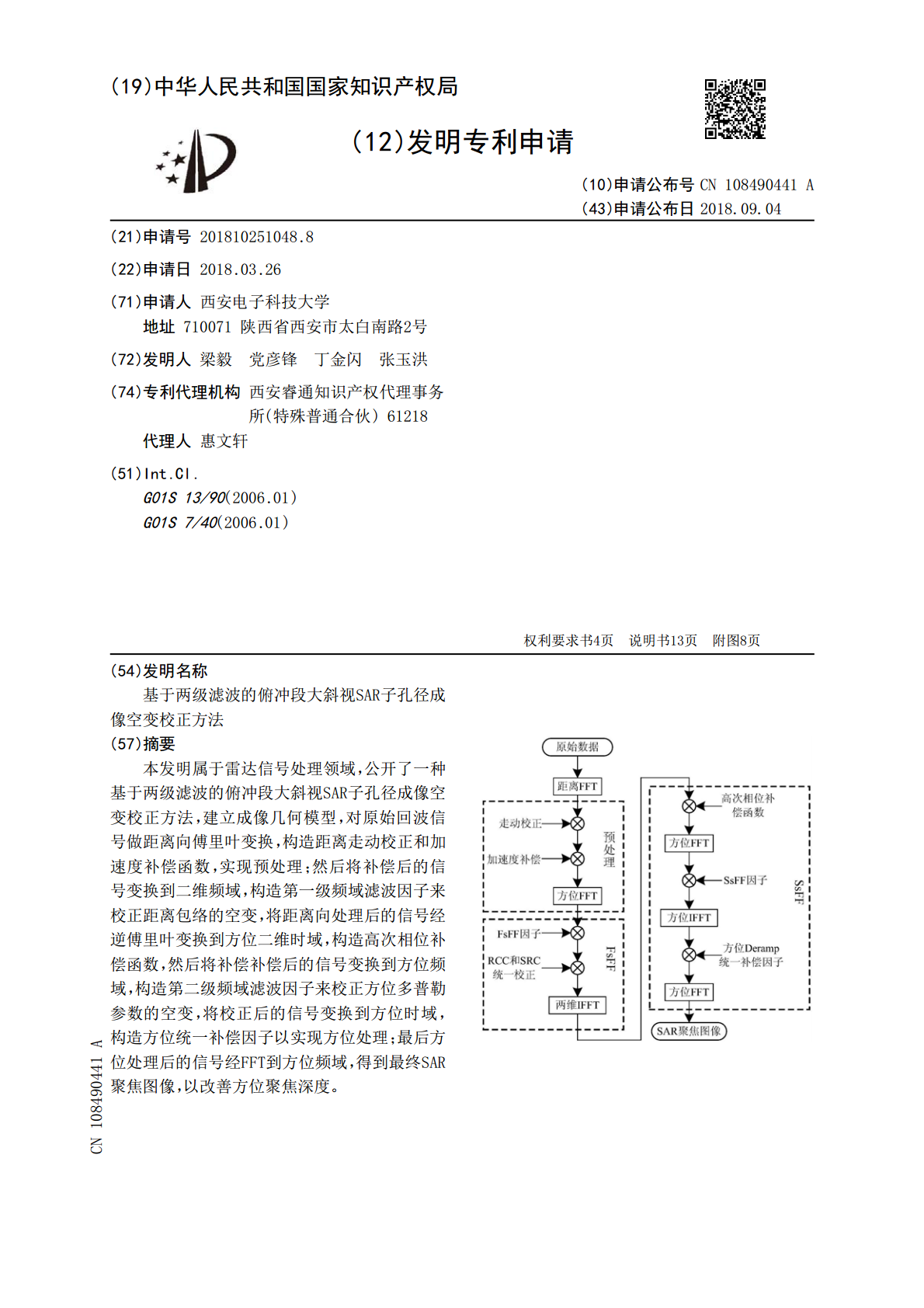
本发明属于雷达信号处理领域,公开了一种基于两级滤波的俯冲段大斜视SAR子孔径成像空变校正方法,建立成像几何模型,对原始回波信号做距离向傅里叶变换,构造距离走动校正和加速度补偿函数,实现预处理;然后将补偿后的信号变换到二维频域,构造第一级频域滤波因子来校正距离包络的空变,将距离向处理后的信号经逆傅里叶变换到方位二维时域,构造高次相位补偿函数,然后将补偿补偿后的信号变换到方位频域,构造第二级频域滤波因子来校正方位多普勒参数的空变,将校正后的信号变换到方位时域,构造方位统一补偿因子以实现方位处理;最后方位处理后

俯冲段大斜视SAR子孔径成像二维空变校正方法.docx
俯冲段大斜视SAR子孔径成像二维空变校正方法俯冲段大斜视SAR(SyntheticApertureRadar)子孔径成像是一种用于获取地面目标高分辨率信息的重要遥感技术。由于具有大的投影角度,其成像过程中存在较大的高程变化,导致产生显著的二维空变畸变。因此,需要进行二维空变校正,以保证成像质量。本论文将介绍俯冲段大斜视SAR子孔径成像二维空变校正方法的原理、流程和应用。一、引言随着卫星成像技术的不断发展,俯冲段大斜视SAR成像技术逐渐成为遥感领域的研究热点。与传统的正视SAR相比,俯冲段大斜视SAR可以提

一种基于时间变标的子孔径大斜视SAR成像处理方法.pdf
本发明公开了一种基于时间变标的子孔径大斜视SAR成像处理方法,属于雷达信号处理技术领域;具体地,本发明首先建立大斜视SAR成像几何模型;然后在距离频域内进行距离走动校正,在二维频域内进行距离向脉压‑距离弯曲校正‑二次距离脉压;最后在方位时域内引入预失真补偿因子、距离多普勒域内引入非线性变标因子、距离时域引入Deramp去斜因子完成方位脉压,至此实现距离多普勒域内的二维聚焦。本发明得到的斜平面SAR图像不存在几何畸变,可以更真实的反映地面场景信息,从而增加了斜平面图像的可用性;且不增加运算量。

一种子孔径大斜视SAR俯冲成像的两步处理方法.pdf
本发明公开了一种子孔径大斜视SAR俯冲成像的两步处理方法,属于雷达信号处理技术领域;该方法分为两步:第一步,建立俯冲等效平飞的成像几何模型,在距离频域完成走动校正、二维频域完成距离向脉压和徙动校正、距离多普勒域引入频域变标因子实现空变校正完成方位向脉压;第二步,根据成像处理的步骤,建立地平面和斜平面之间的投影关系,通过反向投影的方法,得到无形变的地平面图像。本发明将俯冲成像等效为平飞成像进行处理,成像模型满足沿合速度方向的平移不变性,在不增加运算量的前提下使方位统一处理成为可能,同时使运动补偿变得相对简单

斜视滑动聚束SAR的子孔径波数域成像方法.pdf
本发明公开了一种斜视滑动聚束SAR的子孔径波数域成像方法,针对斜视情况对传统滑动聚束SAR子孔径法进行了改进。首先将全孔径重叠划分子孔径,将适用于斜视情况的扩展波数域方法作为子孔径基本成像方法,然后在距离多普勒域采用改进的BAS方法完成方位向处理并实现子孔径拼接,得到斜视情况下的全孔径图像。本发明克服了斜视滑动聚束SAR存在的数据量大、方位多普勒中心非零、以及多普勒带宽过大的问题,具有较大的实用价值。