
基于多普勒频谱重心校正的调频连续波着陆雷达测速方法.pdf

是你****晨呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多普勒频谱重心校正的调频连续波着陆雷达测速方法.pdf
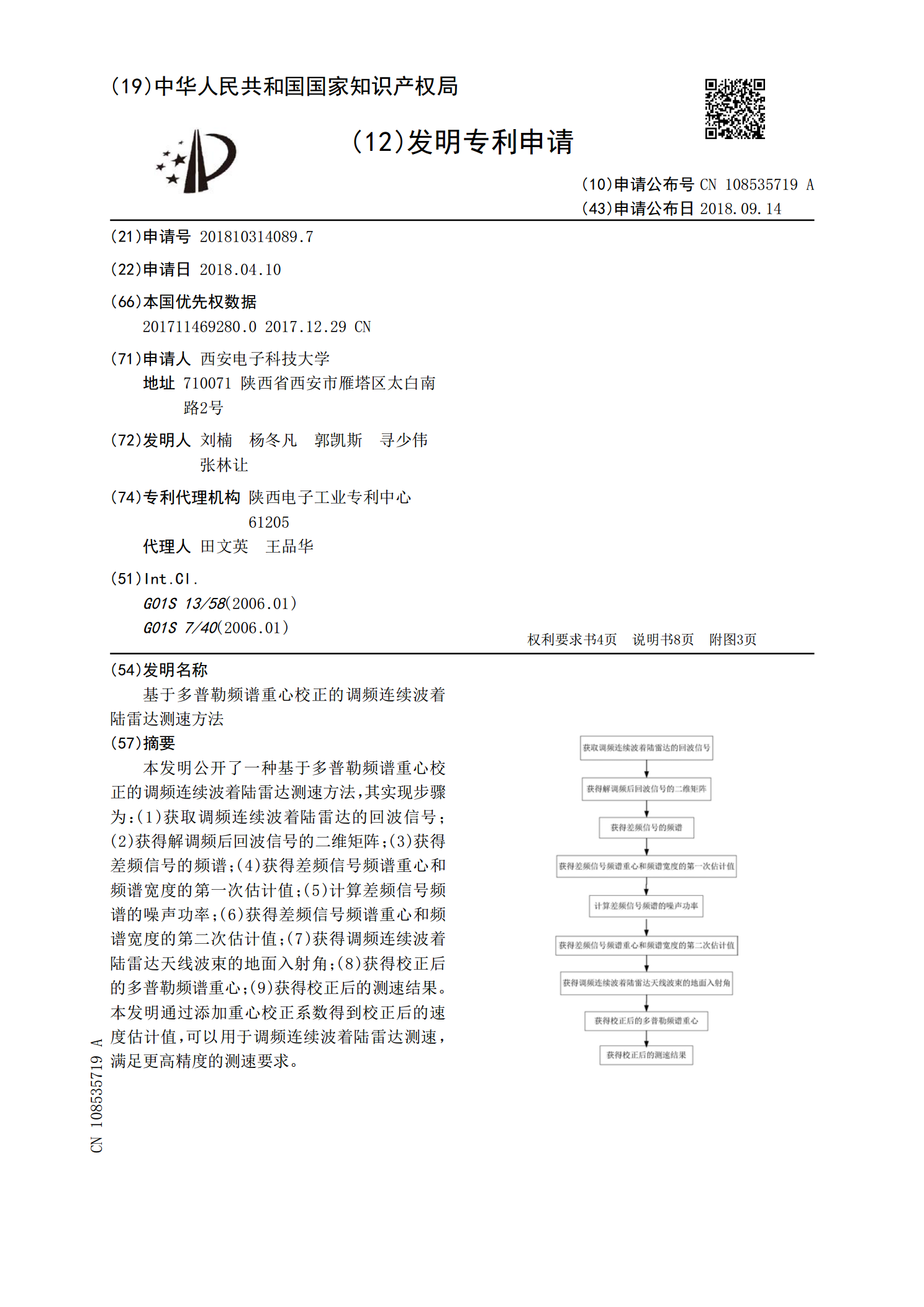
本发明公开了一种基于多普勒频谱重心校正的调频连续波着陆雷达测速方法,其实现步骤为:(1)获取调频连续波着陆雷达的回波信号;(2)获得解调频后回波信号的二维矩阵;(3)获得差频信号的频谱;(4)获得差频信号频谱重心和频谱宽度的第一次估计值;(5)计算差频信号频谱的噪声功率;(6)获得差频信号频谱重心和频谱宽度的第二次估计值;(7)获得调频连续波着陆雷达天线波束的地面入射角;(8)获得校正后的多普勒频谱重心;(9)获得校正后的测速结果。本发明通过添加重心校正系数得到校正后的速度估计值,可以用于调频连续波着陆雷

激光多普勒测速中连续波调频非线性的分析与校正.docx
激光多普勒测速中连续波调频非线性的分析与校正激光多普勒测速(LaserDopplerVelocimetry,LDV)是一种利用光学效应来测量物体速度的方法,它通过测量物体与激光束之间的多普勒频移来计算出速度。连续波调频(ContinuousWave,CW)LDV是一种常见的LDV技术,它通过改变调制方式获得更高的分辨率和灵敏度,但是在实际应用中存在着非线性和诸多误差,需要进行分析与校正。1.连续波调频非线性的原因与特点连续波调频的基本原理是:激光束经过激光器产生连续波,经过光电调制器(AOM)进行调制,然

全相参连续波多普勒雷达及其测距测速方法.pdf
本发明公开了一种全相参连续波多普勒雷达及其测距测速方法,首先获得回波信号与发射信号混频得到的差频复信号,并根据距离频率‑多普勒频率与目标距离‑速度的调制特性,采用距离维FFT+方位维MTD的二维联合检测方式,利用多个相参的高重频调制信号独立获得无模糊的径向速度信息,然后再将速度引入的多普勒信息在距离维频域信息中去除,消除距离‑速度耦合的影响,从而进一步得到准确的距离信息。本发明同时具备相参雷达测速和连续波雷达无距离盲区测距的特点,满足无距离盲区、同时测距测速、实时性、小型化、低功耗的要求。
交替线性调频脉冲调频连续波多普勒激光雷达.pdf
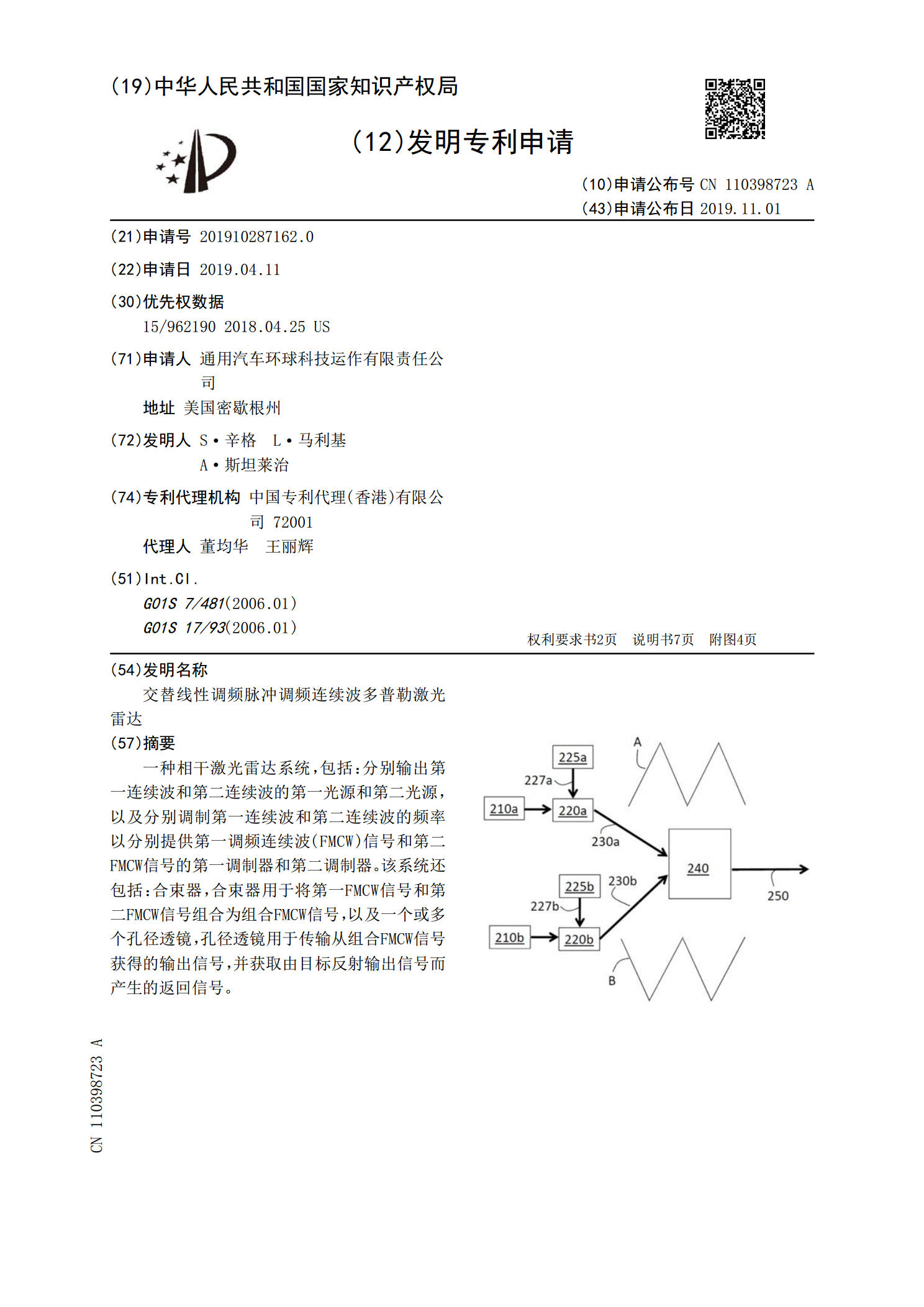
一种相干激光雷达系统,包括:分别输出第一连续波和第二连续波的第一光源和第二光源,以及分别调制第一连续波和第二连续波的频率以分别提供第一调频连续波(FMCW)信号和第二FMCW信号的第一调制器和第二调制器。该系统还包括:合束器,合束器用于将第一FMCW信号和第二FMCW信号组合为组合FMCW信号,以及一个或多个孔径透镜,孔径透镜用于传输从组合FMCW信号获得的输出信号,并获取由目标反射输出信号而产生的返回信号。
一种三角波调制线性调频连续波雷达测速方法.pdf
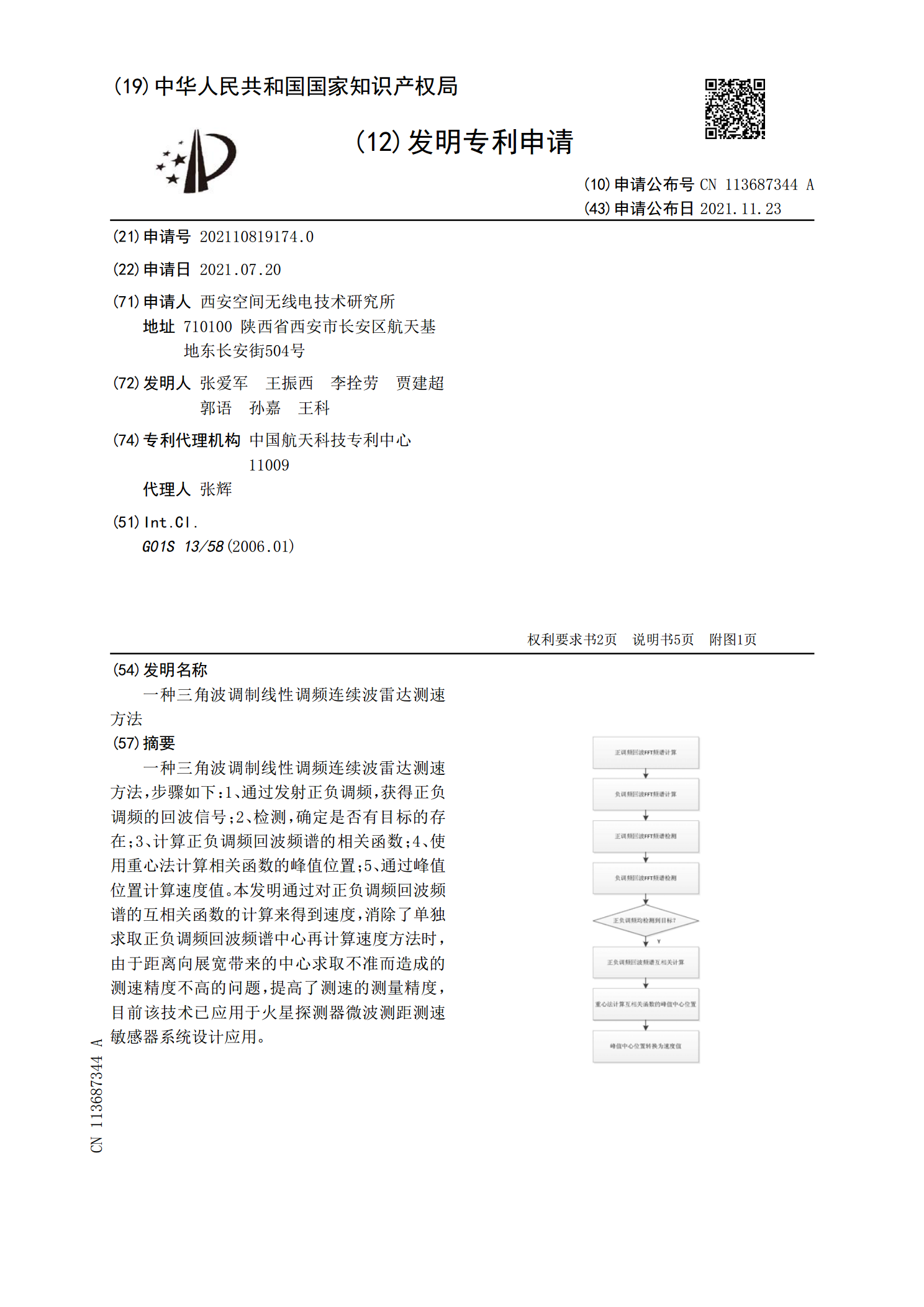
一种三角波调制线性调频连续波雷达测速方法,步骤如下:1、通过发射正负调频,获得正负调频的回波信号;2、检测,确定是否有目标的存在;3、计算正负调频回波频谱的相关函数;4、使用重心法计算相关函数的峰值位置;5、通过峰值位置计算速度值。本发明通过对正负调频回波频谱的互相关函数的计算来得到速度,消除了单独求取正负调频回波频谱中心再计算速度方法时,由于距离向展宽带来的中心求取不准而造成的测速精度不高的问题,提高了测速的测量精度,目前该技术已应用于火星探测器微波测距测速敏感器系统设计应用。