
基于脉内多普勒频率模糊补偿的外辐射源动目标探测方法.pdf

一吃****昕靓


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于脉内多普勒频率模糊补偿的外辐射源动目标探测方法.pdf
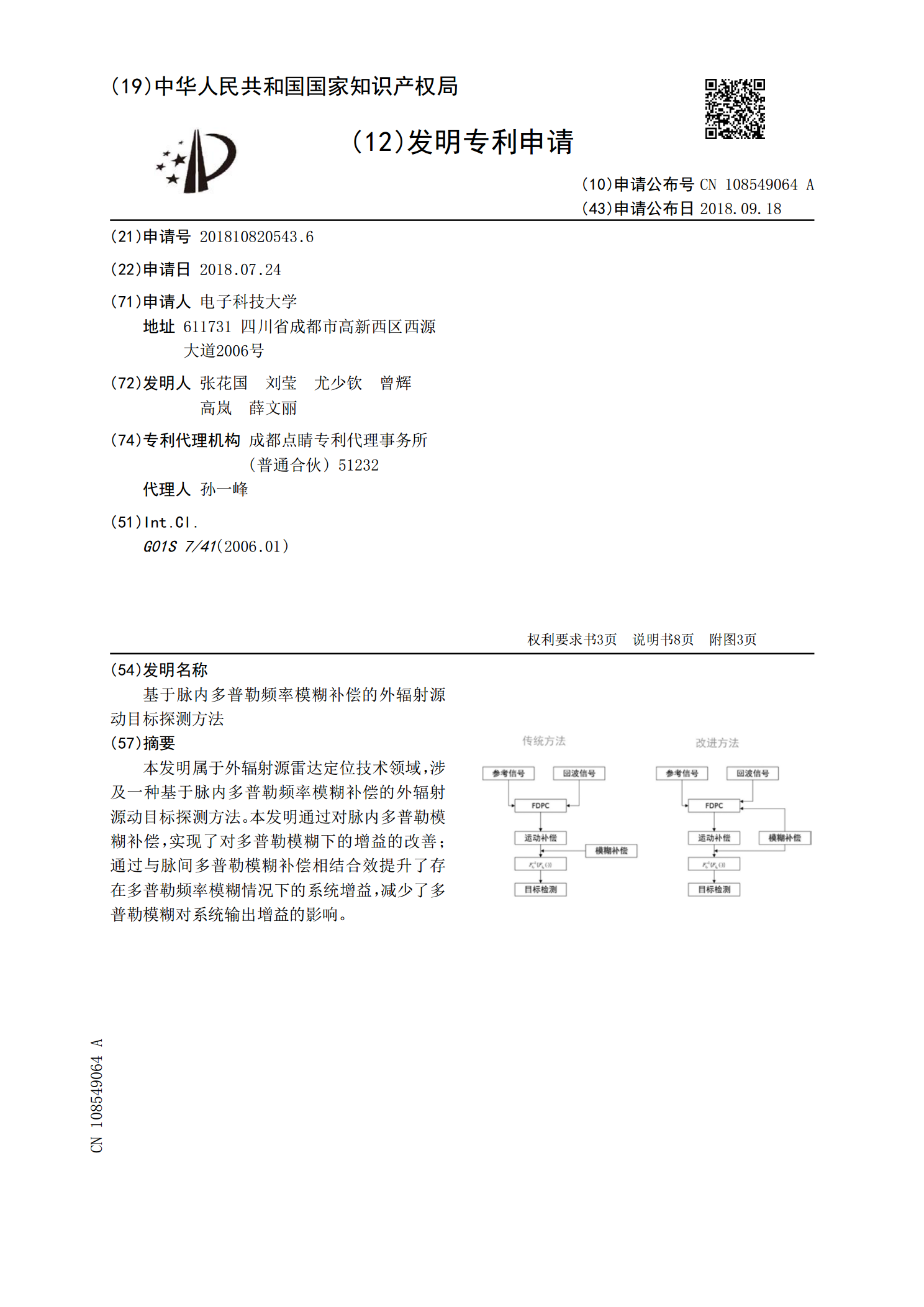
本发明属于外辐射源雷达定位技术领域,涉及一种基于脉内多普勒频率模糊补偿的外辐射源动目标探测方法。本发明通过对脉内多普勒模糊补偿,实现了对多普勒模糊下的增益的改善;通过与脉间多普勒模糊补偿相结合效提升了存在多普勒频率模糊情况下的系统增益,减少了多普勒模糊对系统输出增益的影响。

基于外辐射源联合时延与多普勒频率的直接跟踪方法.pdf
本发明涉及一种基于外辐射源联合时延与多普勒频率的直接跟踪方法,首先建立目标的状态转移模型以及包含外辐射源的直达波和回波的接收信号模型;通过计算接收信号的傅立叶系数将时域数据转化成频域数据,对频域接收数据构建高维最大似然估计,利用信息矩阵的最大特征值作为粒子滤波中粒子的后验概率加权,通过重采样获得权值较大的粒子,对所得粒子取平均得到对应时刻目标位置的估计。本发明相比于传统跟踪方法,综合考虑外辐射源的直达波信息与目标反射回波信息,构建包含时延与多普勒信息的多维信号模型,利用底层接收数据构建粒子后验概率加权,直

外辐射源雷达目标多普勒徙动快速补偿算法研究的开题报告.docx
外辐射源雷达目标多普勒徙动快速补偿算法研究的开题报告一、选题背景与意义随着科技的不断进步,雷达技术在军事、民用等领域中的应用越来越广泛,尤其是在水面目标搜索、探测等领域中,外辐射源雷达成为了重要的一种装备,其具有边探测边打击、能够跨越大面积水域搜索、探测水面多变的目标等优点。而雷达目标的多普勒徙动是影响雷达探测精度的一个重要因素,特别是在高速飞行目标探测中,往往会出现多普勒失锁的情况,从而导致探测失败。因此,对于多普勒徙动的快速补偿研究具有重要的现实意义。二、主要研究内容本文主要针对外辐射源雷达目标多普勒

外辐射源雷达目标多普勒徙动快速补偿算法研究的任务书.docx
外辐射源雷达目标多普勒徙动快速补偿算法研究的任务书任务书任务名称:外辐射源雷达目标多普勒徙动快速补偿算法研究任务目的:研究外辐射源雷达目标多普勒徙动快速补偿算法,提高雷达成像质量和定位精度。任务内容:1.外辐射源雷达目标多普勒徙动补偿算法的研究;2.快速算法的设计与实现;3.算法的性能与效果分析;4.撰写研究报告。任务描述:雷达成像技术是现代雷达技术发展的重要组成部分,它将雷达信号处理和图像重建技术紧密结合,可以在不进入检测区域的情况下实现无人值守侦察、监视和跟踪目标。在雷达成像过程中,多普勒徙动对成像质
一种基于外辐射源时延和多普勒频率的直接定位方法.pdf
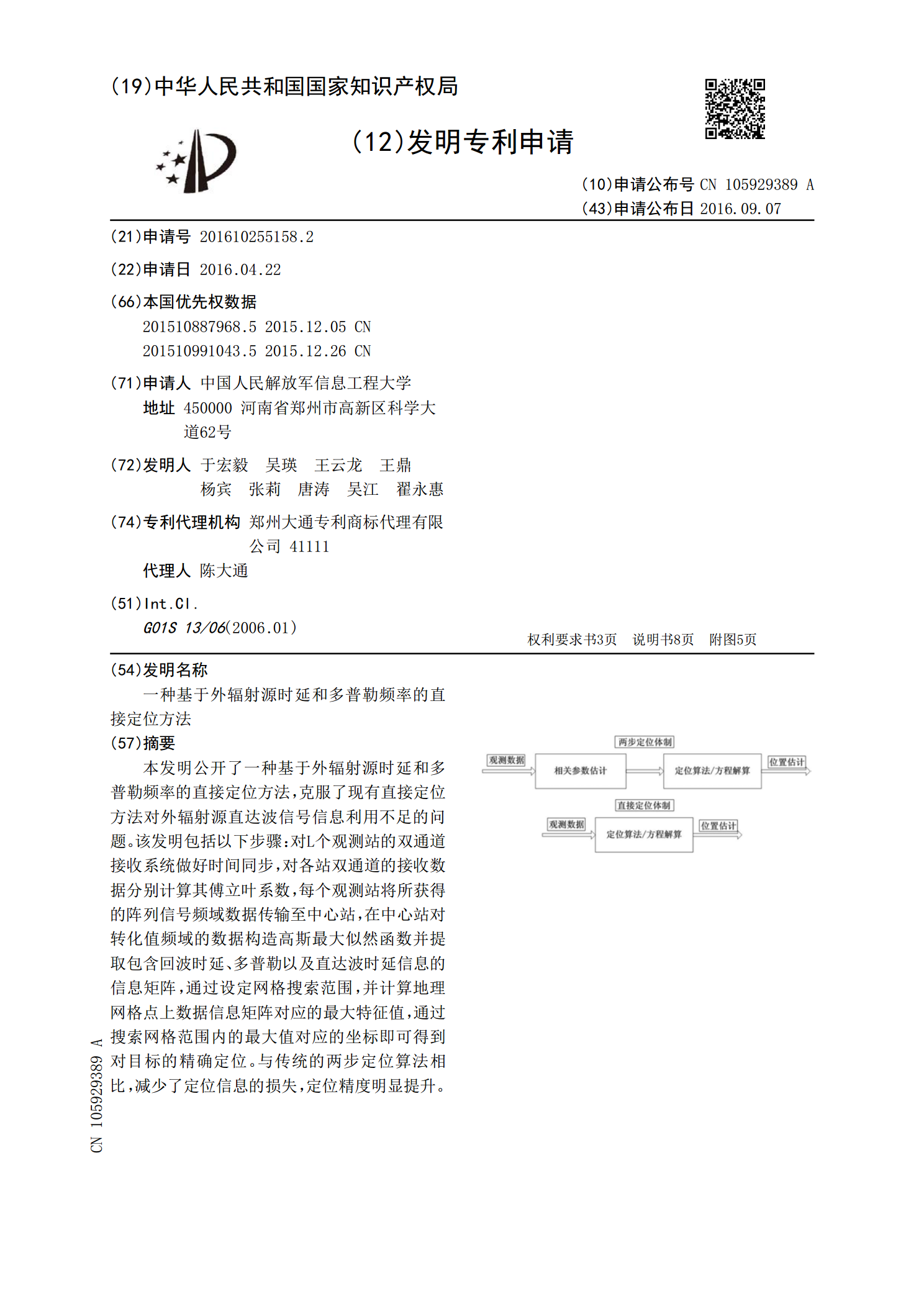
本发明公开了一种基于外辐射源时延和多普勒频率的直接定位方法,克服了现有直接定位方法对外辐射源直达波信号信息利用不足的问题。该发明包括以下步骤:对L个观测站的双通道接收系统做好时间同步,对各站双通道的接收数据分别计算其傅立叶系数,每个观测站将所获得的阵列信号频域数据传输至中心站,在中心站对转化值频域的数据构造高斯最大似然函数并提取包含回波时延、多普勒以及直达波时延信息的信息矩阵,通过设定网格搜索范围,并计算地理网格点上数据信息矩阵对应的最大特征值,通过搜索网格范围内的最大值对应的坐标即可得到对目标的精确定位