
一种相干多普勒测风激光雷达系统及其控制方法.pdf

桂香****盟主

1/9
2/9
3/9

4/9

5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种相干多普勒测风激光雷达系统及其控制方法.pdf
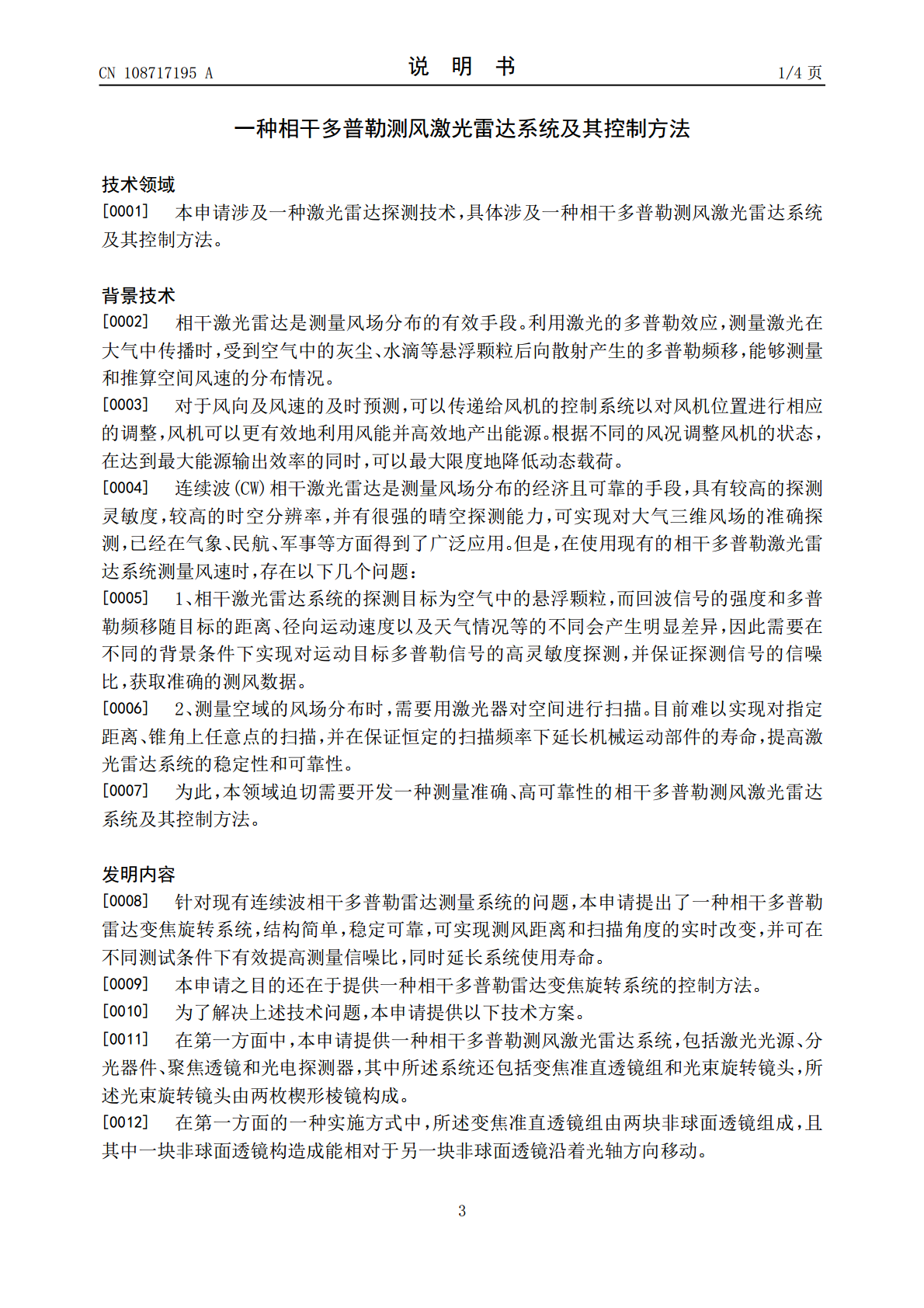
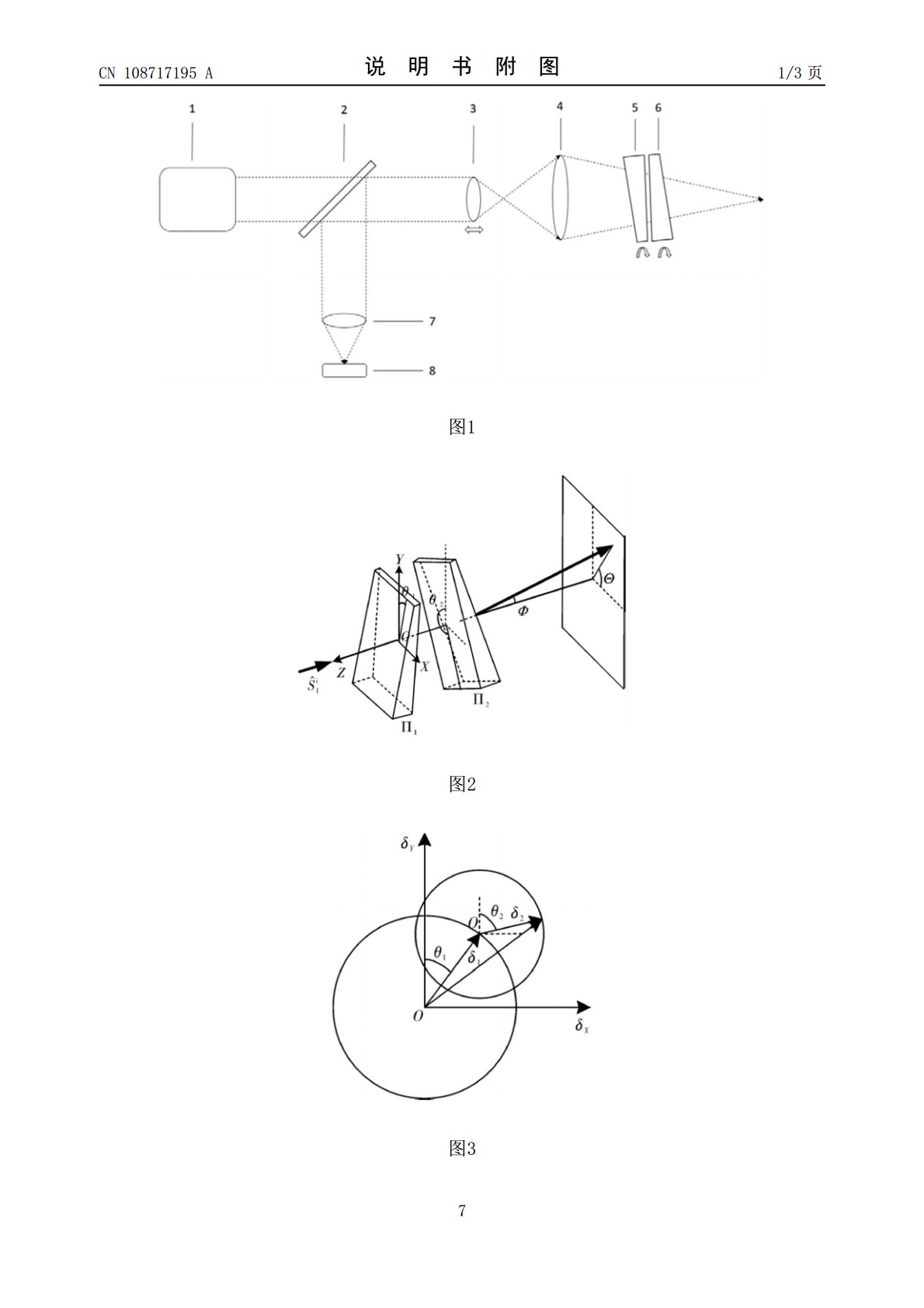
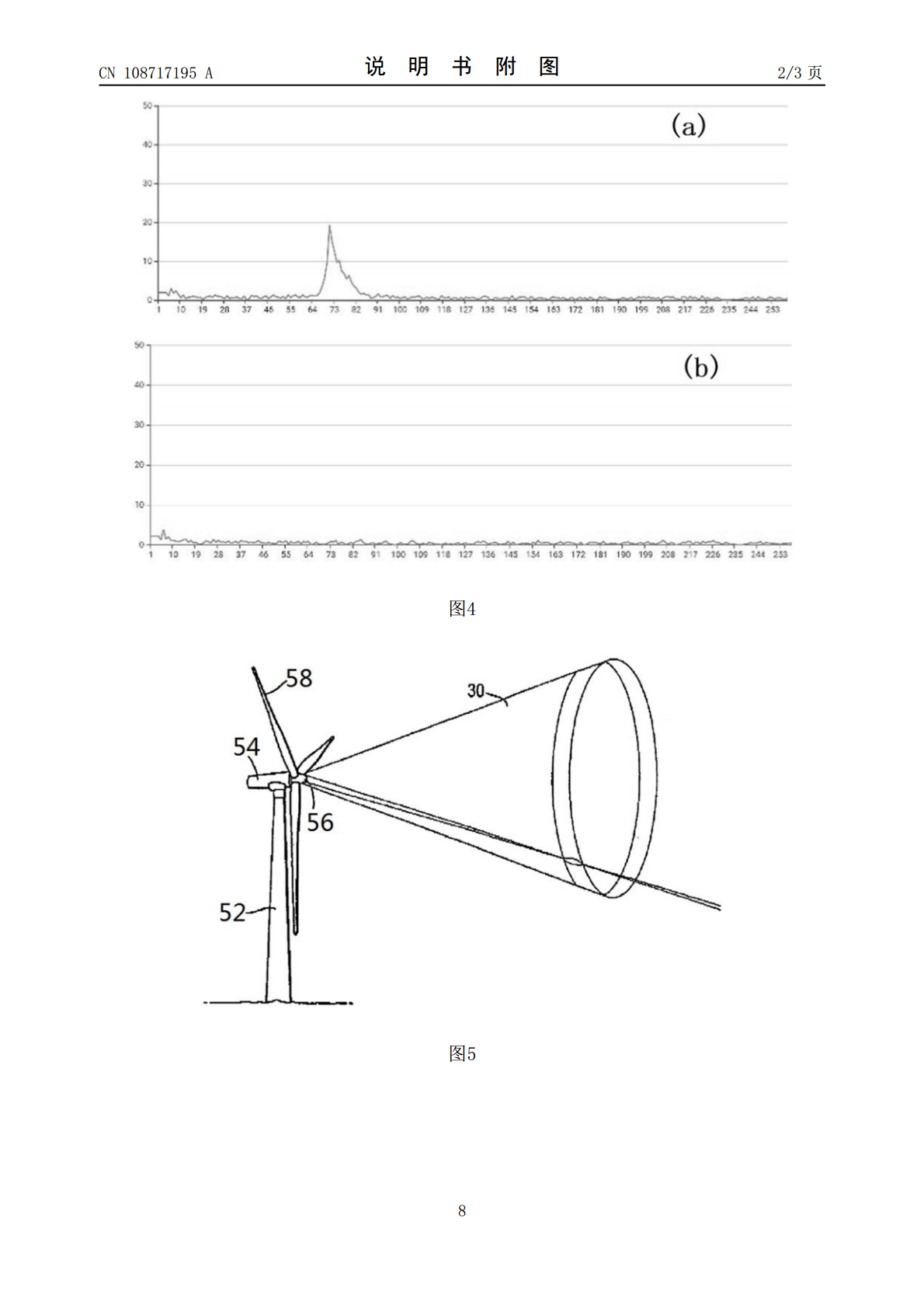
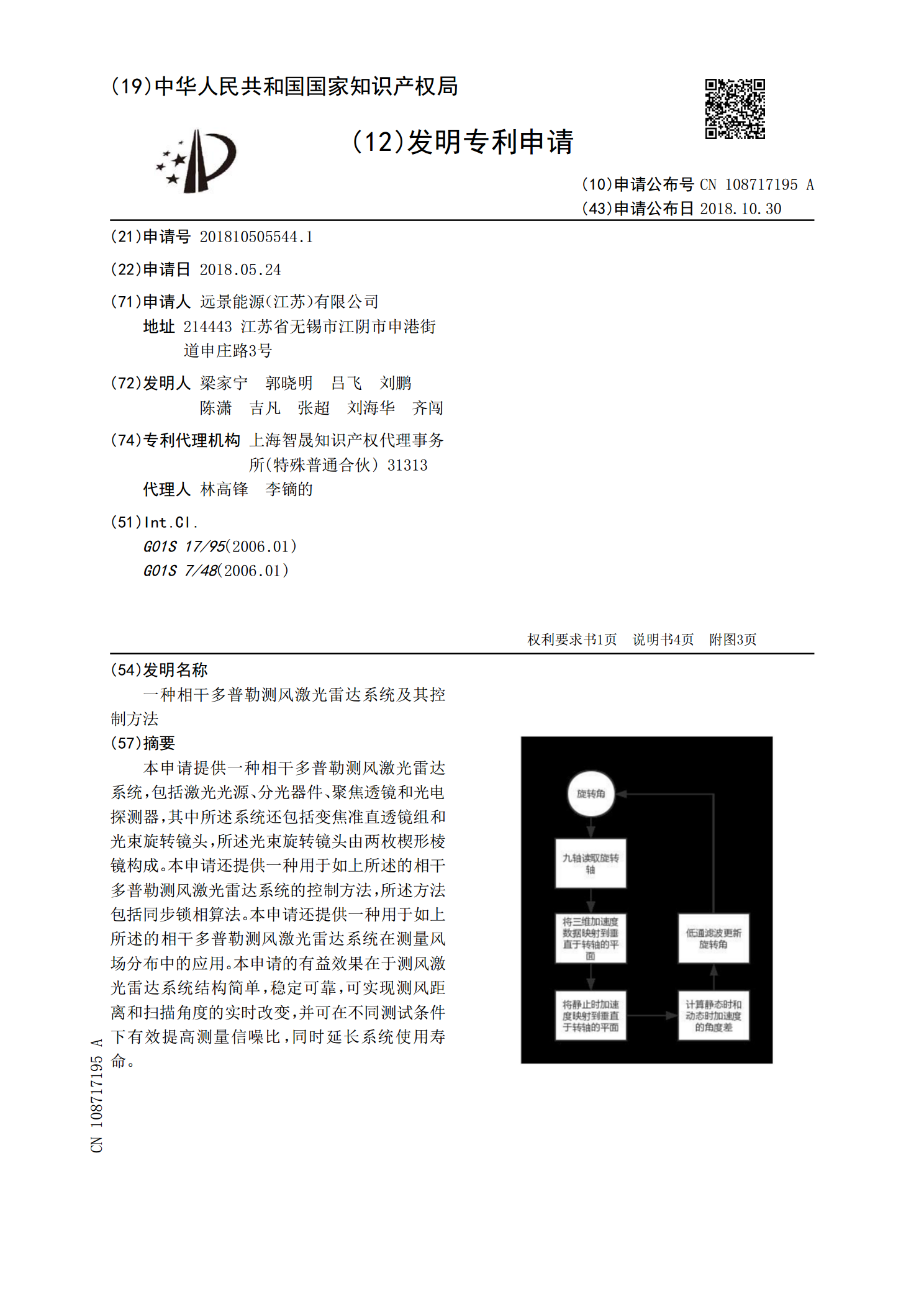
本申请提供一种相干多普勒测风激光雷达系统,包括激光光源、分光器件、聚焦透镜和光电探测器,其中所述系统还包括变焦准直透镜组和光束旋转镜头,所述光束旋转镜头由两枚楔形棱镜构成。本申请还提供一种用于如上所述的相干多普勒测风激光雷达系统的控制方法,所述方法包括同步锁相算法。本申请还提供一种用于如上所述的相干多普勒测风激光雷达系统在测量风场分布中的应用。本申请的有益效果在于测风激光雷达系统结构简单,稳定可靠,可实现测风距离和扫描角度的实时改变,并可在不同测试条件下有效提高测量信噪比,同时延长系统使用寿命。

相干多普勒测风激光雷达研究.docx
相干多普勒测风激光雷达研究相干多普勒测风激光雷达研究摘要:相干多普勒测风激光雷达是一种用于测量大气中风场分布的先进技术。本文综述了相干多普勒测风激光雷达的工作原理,包括光学相干性、多普勒效应以及测量原理等。随后,叙述了相干多普勒测风激光雷达的应用领域,如气象学、空气质量监测以及风力发电等。最后,针对目前的研究不足,提出了进一步的研究方向和展望。关键词:相干多普勒测风激光雷达、光学相干性、多普勒效应、测量原理、应用领域1.引言风是一种重要的大气运动形式,对气象、环境以及能源等领域都有着重要的影响。因此,准确

相干多普勒测风激光雷达、方法和存储介质.pdf
本申请公开了一种相干多普勒测风激光雷达、方法和存储介质,所述相干多普勒测风激光雷达包括:激光器,用于发射激光;光纤分路器,用于分离激光,得到本振参考光和测量光;光纤接头,用于传输测量光至聚焦透镜;聚焦透镜,用于聚焦测量光于测量点,得到反射光;环形器,用于传输反射光至探测器;探测器,用于根据本振参考光和反射光生成拍频信号。本申请实施例相较于现有的测风激光雷达,由于采用本振参考光和测量光异路传播的方式,降低了测风激光雷达的元件精度要求,从而减少了测风激光雷达的成本。本申请可广泛应用于多普勒激光测风技术领域中。

基于遗传算法的相干多普勒测风激光雷达风场反演方法.docx
基于遗传算法的相干多普勒测风激光雷达风场反演方法基于遗传算法的相干多普勒测风激光雷达风场反演方法摘要:相干多普勒测风激光雷达是一种非常重要的风速测量工具,广泛应用于气象科学、环境监测和飞行器导航等领域。本论文提出了一种基于遗传算法的相干多普勒测风激光雷达风场反演方法,该方法通过优化反演模型中的参数,实现了对风场的准确反演。实验结果表明,基于遗传算法的相干多普勒测风激光雷达风场反演方法具有较好的性能和可靠性。关键词:相干多普勒测风激光雷达,风场反演,遗传算法引言相干多普勒测风激光雷达是一种通过测量大气中散射

相干多普勒测风激光雷达低信噪比区域回波信号的估计方法.docx
相干多普勒测风激光雷达低信噪比区域回波信号的估计方法相干多普勒测风激光雷达是一种常用于气象、环境监测和飞行控制等领域的仪器。它利用激光脉冲对大气中的气溶胶、云和雾等悬浮颗粒进行测量,并通过测量回波信号的多普勒频移来估计风速。然而,在低信噪比区域,由于回波信号较弱,常规的估计方法往往会导致较大的误差。因此,本论文将介绍一种基于信号处理技术的高精度估计方法,以提高相干多普勒测风激光雷达在低信噪比区域的测量精度。随着激光技术的发展,相干多普勒测风激光雷达已经成为近年来风速测量的重要工具。然而,在低信噪比区域,回