
一种基于伪随机序列同步的快速自适应多普勒估计方法.pdf

秋花****姐姐


1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于伪随机序列同步的快速自适应多普勒估计方法.pdf
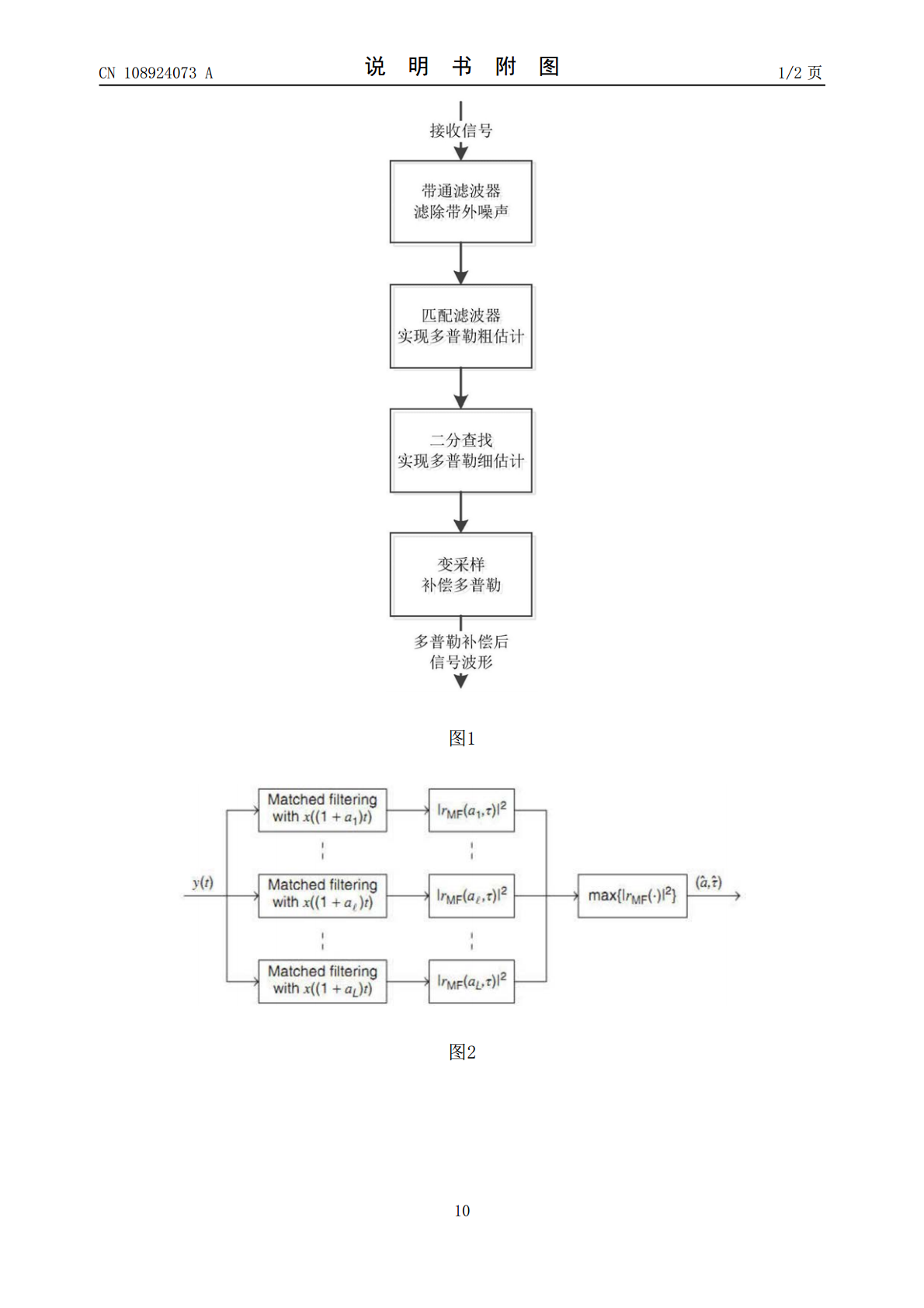
本发明公开了一种基于伪随机序列同步的快速自适应多普勒估计方法,所述方法包括:步骤1)将接收机接收的信号序列输入带通滤波器,滤除带外噪声;步骤2)对带通滤波器输出的信号序列采用匹配滤波器进行拷贝相关,实现多普勒粗估计,得到多普勒粗估计结果
一种基于伪随机序列差分编码的抗多普勒频移同步方法.pdf
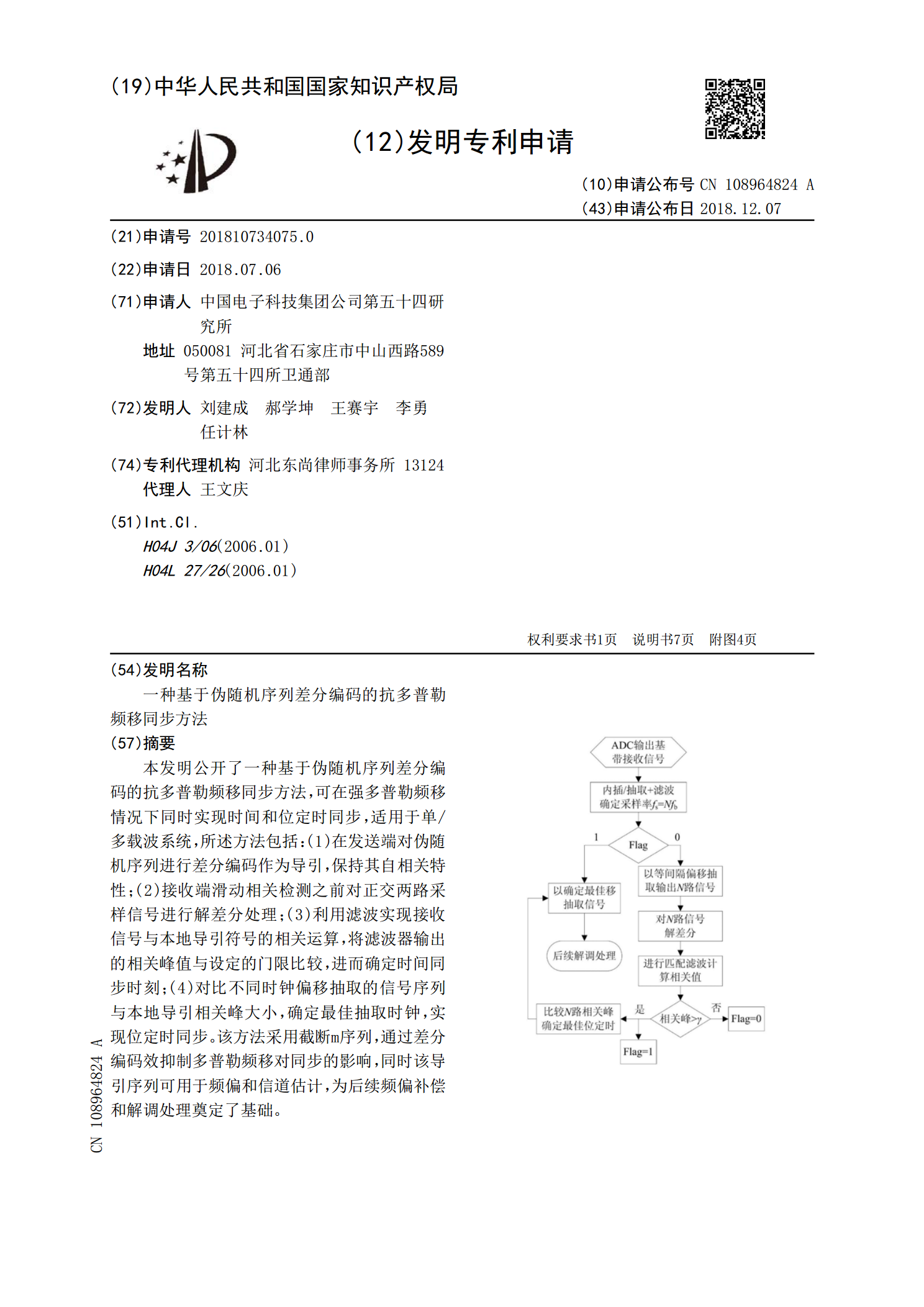
本发明公开了一种基于伪随机序列差分编码的抗多普勒频移同步方法,可在强多普勒频移情况下同时实现时间和位定时同步,适用于单/多载波系统,所述方法包括:(1)在发送端对伪随机序列进行差分编码作为导引,保持其自相关特性;(2)接收端滑动相关检测之前对正交两路采样信号进行解差分处理;(3)利用滤波实现接收信号与本地导引符号的相关运算,将滤波器输出的相关峰值与设定的门限比较,进而确定时间同步时刻;(4)对比不同时钟偏移抽取的信号序列与本地导引相关峰大小,确定最佳抽取时钟,实现位定时同步。该方法采用截断m序列,通过差分

基于随机序列统计特性的伪随机序列生成方法.docx
基于随机序列统计特性的伪随机序列生成方法基于随机序列统计特性的伪随机序列生成方法摘要:伪随机序列在现代密码学、通信系统以及模拟计算中扮演着重要的角色。伪随机序列是通过特定的算法生成的,具有类似于真随机序列的统计特性。本文主要介绍了基于随机序列统计特性的伪随机序列生成方法,包括线性反馈移位寄存器(LFSR)和非线性反馈移位寄存器(NLFSR)。1.引言伪随机序列是一种看似随机的序列,但是实际上是通过特定的算法生成的。伪随机序列在密码学、通信系统以及模拟计算中起着至关重要的作用。一个好的伪随机序列需要满足以下

基于伪噪声序列的OFDM信道估计方法.docx
基于伪噪声序列的OFDM信道估计方法随着通信技术的不断发展,正交频分复用(OFDM)技术在现代通信系统中得到广泛的应用。OFDM技术不仅能够提高频谱利用效率,而且可以减少多径效应对系统性能的影响。但是,在OFDM系统中,由于多径效应的存在,信道会发生时变和频率选择性,这可能导致信道估计和均衡变得困难。为了解决这些问题,许多学者和工程师们尝试开发各种新的方法来提高信道估计的效率和精度。在这些方法中,基于伪随机序列的OFDM信道估计方法一直备受关注。基于伪随机序列的OFDM信道估计方法是一种通用的信道估计方法

一种简便伪随机序列产生方法研究.docx
一种简便伪随机序列产生方法研究一种简便伪随机序列产生方法研究摘要:伪随机序列的生成在许多领域中都具有重要的应用,因此研究一种简便的伪随机序列产生方法具有一定的实际意义。本文基于线性同余法和置换操作,提出了一种简便的伪随机序列产生方法。通过实验验证,该方法在保证序列随机性的同时,具有较高的效率和简洁性。关键词:伪随机序列,线性同余法,置换操作。一、引言伪随机序列在密码学、模拟计算、模拟实验等领域中都具有广泛的应用。伪随机序列是由计算机生成的一组数列,通过适当的算法,使得序列中的数值在统计上具有与真随机数列相