
单脉冲雷达弱小目标联合检测及状态估计方法.pdf

绮兰****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

单脉冲雷达弱小目标联合检测及状态估计方法.pdf
本发明公开了一种单脉冲雷达弱小目标联合检测及状态估计方法,包括步骤:对雷达回波进行预处理;滤波初始化;状态预测;状态更新;重要性重采样;重采样移动;状态估计。本发明同时获得了低信噪比条件下的目标检测与状态估计,实现了目标的准确检测以及幅度、多普勒和单脉冲比的稳定估计;本发明易于实现,实用性强,效果好,在单脉冲雷达弱小目标检测处理领域具有广阔的应用前景。
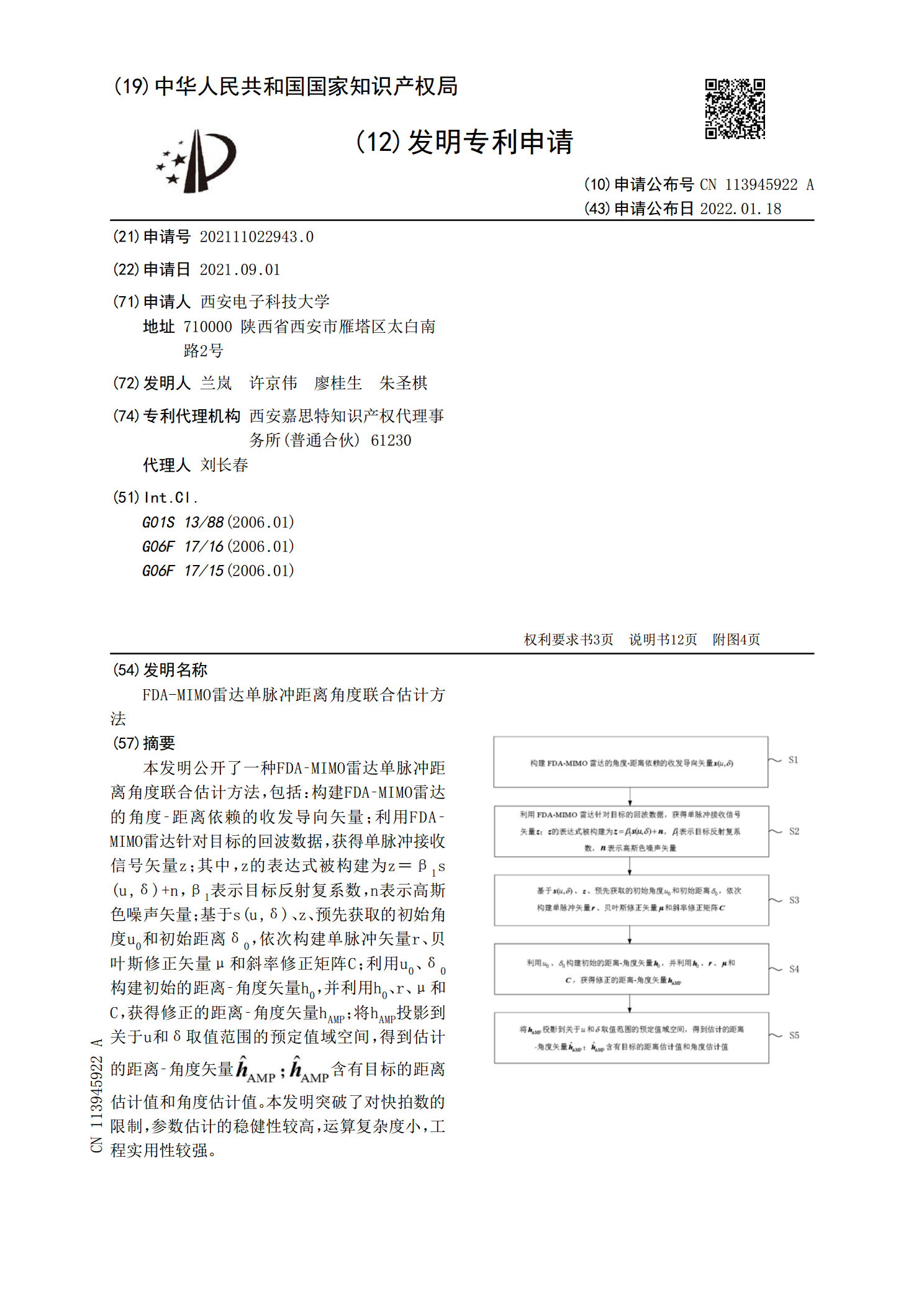
FDA-MIMO雷达单脉冲距离角度联合估计方法.pdf
本发明公开了一种FDA‑MIMO雷达单脉冲距离角度联合估计方法,包括:构建FDA‑MIMO雷达的角度‑距离依赖的收发导向矢量;利用FDA‑MIMO雷达针对目标的回波数据,获得单脉冲接收信号矢量z;其中,z的表达式被构建为z=β
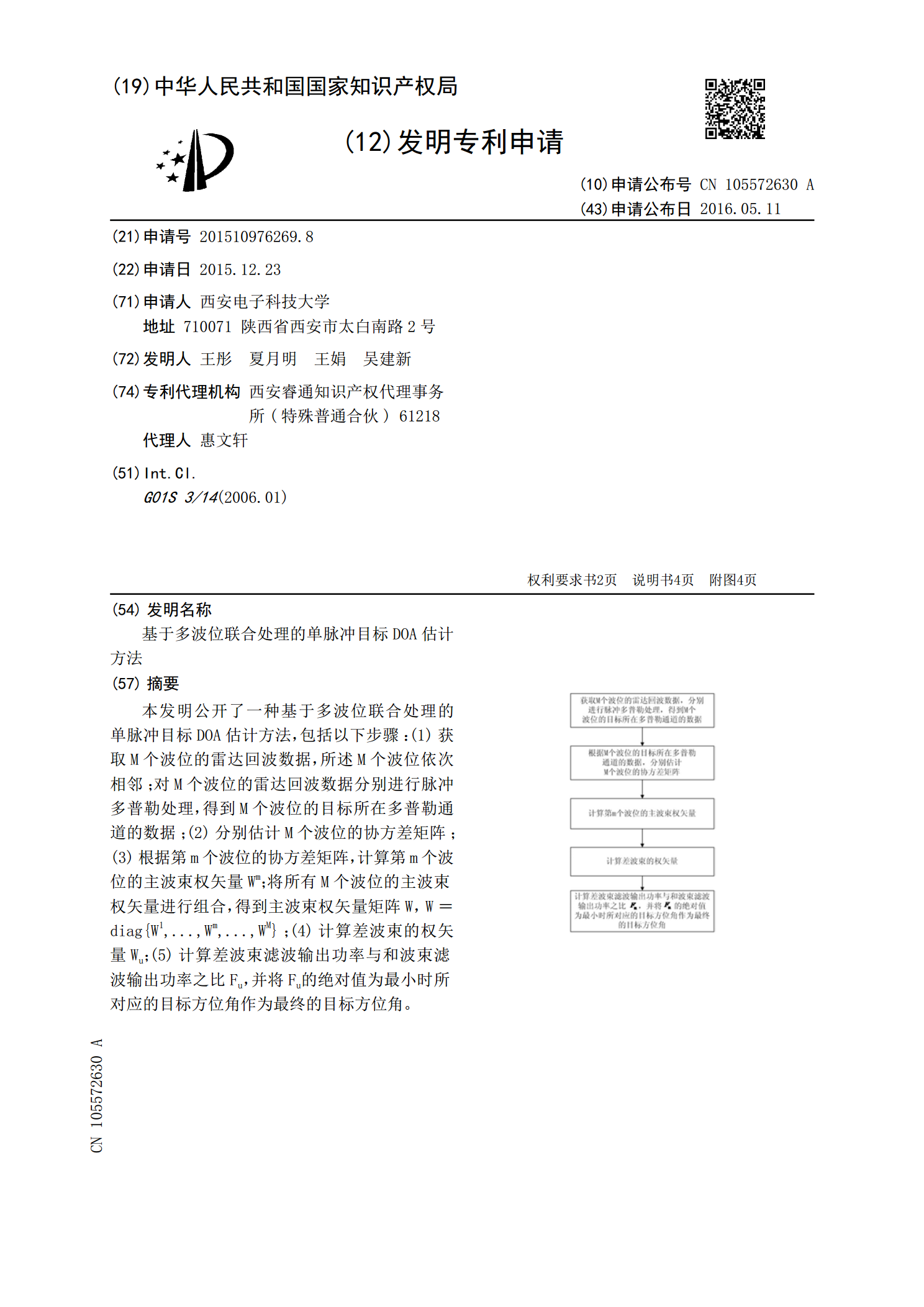
基于多波位联合处理的单脉冲目标DOA估计方法.pdf
本发明公开了一种基于多波位联合处理的单脉冲目标DOA估计方法,包括以下步骤:(1)获取M个波位的雷达回波数据,所述M个波位依次相邻;对M个波位的雷达回波数据分别进行脉冲多普勒处理,得到M个波位的目标所在多普勒通道的数据;(2)分别估计M个波位的协方差矩阵;(3)根据第m个波位的协方差矩阵,计算第m个波位的主波束权矢量W
阵列雷达单脉冲群目标分辨方法.pptx
汇报人:/目录0102阵列雷达单脉冲群目标分辨方法的定义阵列雷达单脉冲群目标分辨方法的重要性阵列雷达单脉冲群目标分辨方法的原理03信号处理技术信号分离技术目标识别技术参数估计技术04信号采集信号预处理信号处理与分离目标识别与跟踪结果输出与显示05阵列雷达单脉冲群目标分辨方法的优势阵列雷达单脉冲群目标分辨方法的局限性阵列雷达单脉冲群目标分辨方法的应用场景与限制条件06阵列雷达单脉冲群目标分辨方法的改进方向阵列雷达单脉冲群目标分辨方法的发展趋势阵列雷达单脉冲群目标分辨方法的前沿研究与展望汇报人:

雷达弱小目标检测前跟踪方法研究的综述报告.docx
雷达弱小目标检测前跟踪方法研究的综述报告近年来,随着雷达技术的不断发展,雷达弱小目标检测前跟踪成为研究热点之一。该技术可用于军事侦察、安全监控、自动驾驶等领域。针对雷达弱小目标检测前跟踪这一问题,国内外学者们进行了众多探索与研究,本文将结合相关文献,对该领域内的研究现状和进展进行综述。目前,雷达弱小目标检测前跟踪技术主要包括基于启发式算法的跟踪方法和基于深度学习的跟踪方法两大类。一、基于启发式算法的跟踪方法1.卡尔曼滤波(KalmanFilter)卡尔曼滤波是一种广泛应用于目标跟踪领域的算法。该算法通过建