
一种图像处理方法和系统.pdf

宜然****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种图像处理方法和系统.pdf
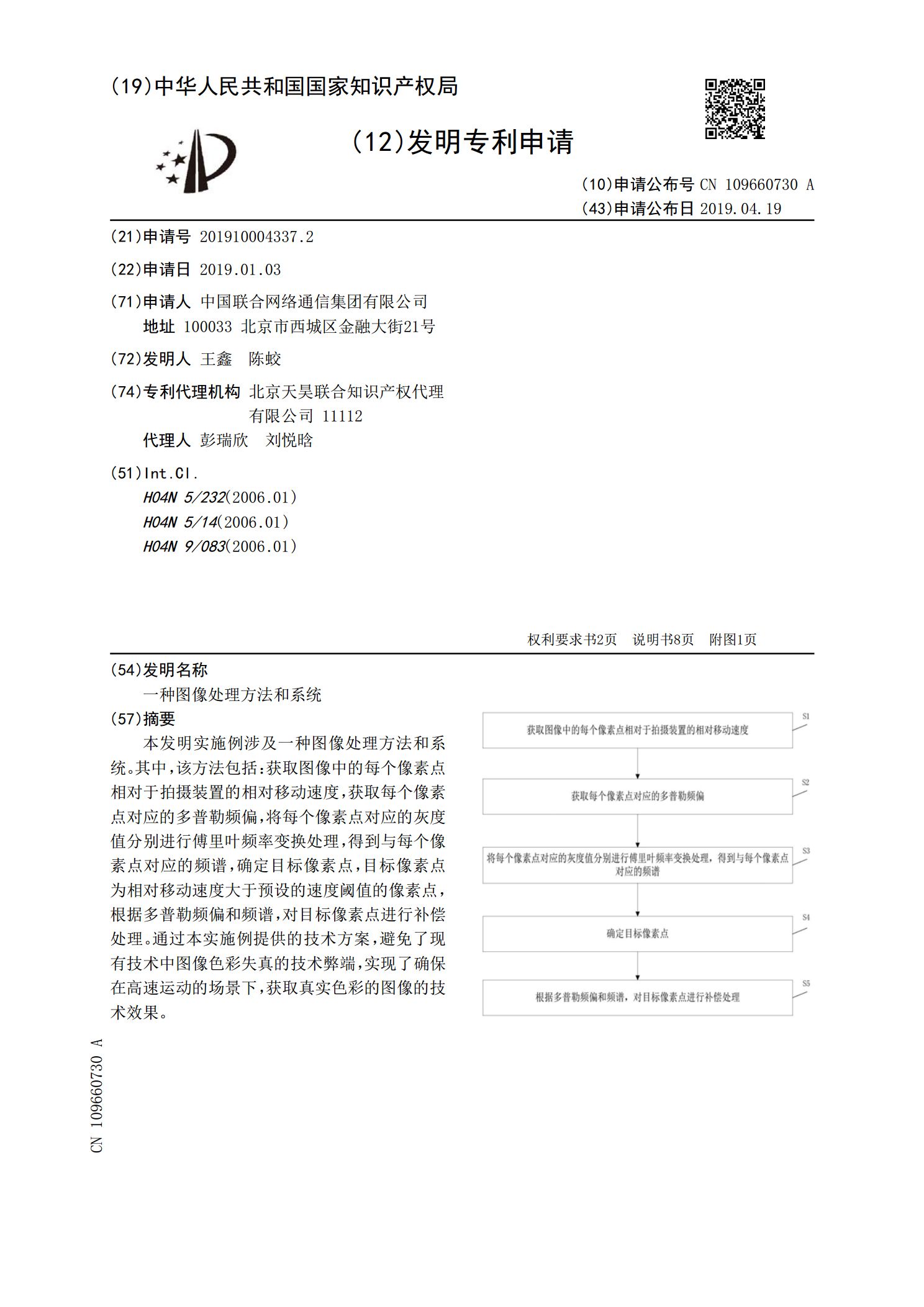
本发明实施例涉及一种图像处理方法和系统。其中,该方法包括:获取图像中的每个像素点相对于拍摄装置的相对移动速度,获取每个像素点对应的多普勒频偏,将每个像素点对应的灰度值分别进行傅里叶频率变换处理,得到与每个像素点对应的频谱,确定目标像素点,目标像素点为相对移动速度大于预设的速度阈值的像素点,根据多普勒频偏和频谱,对目标像素点进行补偿处理。通过本实施例提供的技术方案,避免了现有技术中图像色彩失真的技术弊端,实现了确保在高速运动的场景下,获取真实色彩的图像的技术效果。

一种图像处理方法和系统.pdf
本发明提供的一种图像处理方法,获取待处理图像,对待处理图像执行第一转换处理,得到灰度图;根据自定义的有效像素阈值threshold1,对灰度图执行第一点图处理,得到第一点图point_image1,点图point_image1中每个像素点数值为0或1;对第一点图point_image1执行第二点图处理,得到第二点图point_image2。本发明还提供一种图像处理系统,包括图片差值模块、灰度图转换模块、第一点图处理模块和第二点图处理模块。本发明能在高清大图像中有效捕捉到待识别图像内符合要求的待识别目标或者

一种图像处理方法和系统.pdf
本发明公开了一种图像处理方法和系统,涉及图像处理技术领域。该方法包括:获取图像处理环境信息;获取场景图像;对场景图像进行预处理,以得到目标场景图像;根据预置的图像模板对目标场景图像进行调整,以得到调整图像;根据预置的特征参数提取调整图像对应的图像特征;基于提取的图像特征对调整图像进行分割,以得到多个待处理图像,并将各个待处理图像进行标记,生成标记关联信息;根据预置的处理规则分别对各个待处理图像进行优化调整,以得到多个优化图像;根据标记关联信息将各个优化图像进行整合,以生成目标处理图像。本发明可针对实际应用

一种图像处理方法和系统.pdf
本说明书实施例提供一种图像处理方法和系统。其中,该方法包括:获取目标对象的第一模态的第一数据和第二数据,根据所述第一数据重建第一图像,根据所述第二数据重建第二图像;其中,所述第一图像对应于所述目标对象的第一状态,所述第二图像对应于所述目标对象的第二状态;获取目标对象的第二模态的第三数据,根据所述第三数据重建第三图像;其中,所述第三图像对应于所述目标对象的第一状态;以及将所述第一图像,第二图像和第三图像输入图像处理模型,获得对应于所述目标对象第二状态下对应的所述第二模态的第四图像。

一种图像处理方法和系统.pdf
本说明书实施例提供一种图像处理方法和系统。所述图像处理方法包括:获取初始材料密度图像;将所述初始材料密度图像输入训练好的图像处理模型以获取目标材料密度图像;其中,所述训练好的图像处理模型对所述初始材料密度图像同时进行分解处理与降噪和/或去伪影处理。