
一种面向智能终端的GNSS高精度定位方法.pdf

冬易****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种面向智能终端的GNSS高精度定位方法.pdf
本发明公开了一种面向智能终端的GNSS高精度定位方法,通过测量噪声低且无周跳的多普勒观测值对原始伪距观测值进行平滑,能显著降低智能终端GNSS原始伪距观测量的测量噪声;采用实时精密卫星轨道和钟差改正信息对由广播星历和钟差参数计算得到的卫星轨道与钟差进行精密改,能够显著提高卫星轨道和卫星钟差的计算精度;采用实时精密电离层信息精确地计算电离层延迟信息从而实现对电离层延迟误差的高精度改正,能够实现对电离层延迟误差的高精度改正;采用伪距和载波相位测量不确定度信息进行伪距和载波相位观测量方差,能够更为有效地区分不同
一种移动智能终端高精度定位方法和系统.pdf
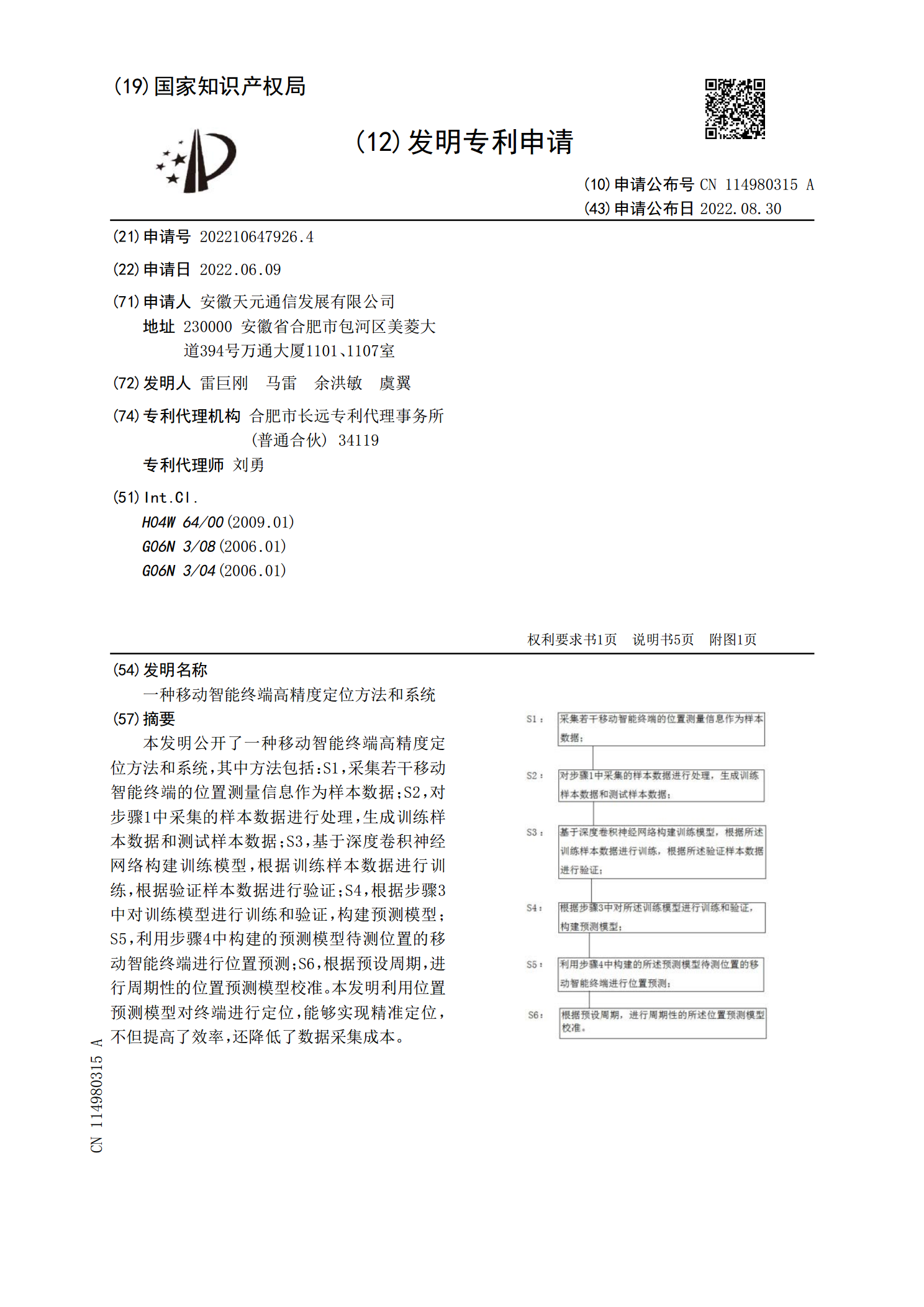
本发明公开了一种移动智能终端高精度定位方法和系统,其中方法包括:S1,采集若干移动智能终端的位置测量信息作为样本数据;S2,对步骤1中采集的样本数据进行处理,生成训练样本数据和测试样本数据;S3,基于深度卷积神经网络构建训练模型,根据训练样本数据进行训练,根据验证样本数据进行验证;S4,根据步骤3中对训练模型进行训练和验证,构建预测模型;S5,利用步骤4中构建的预测模型待测位置的移动智能终端进行位置预测;S6,根据预设周期,进行周期性的位置预测模型校准。本发明利用位置预测模型对终端进行定位,能够实现精准定

一种面向GNSS多种失效状态的车辆定位误差智能预测方法.pdf
本发明公开了一种面向GNSS多种失效状态的车辆定位误差智能预测方法。该方法首先根据GNSS失效时的可见星数将失效状态分为0颗星、1颗星、2颗星、3颗星四种,依据定位误差对历史信息的依赖特性,针对不同失效状态下的定位误差预测任务分别建立基于LSTM的深度学习网络;接着,借鉴多任务学习思想,充分利用不同失效状态子任务模型之间的相似性,采用soft参数共享机制进行综合训练,提升各子任务模型的泛化能力;最终,训练完成后的车辆定位误差智能预测模型可以根据实际的可见星数目所决定的输入量个数,选择相应的子任务模型,得到

基于GNSS高精度定位的矿山车辆智能调度系统和方法.pdf
本发明涉及矿山车辆智能调度技术,属于智能调度技术领域,具体为基于GNSS高精度定位的矿山车辆智能调度系统和方法。通过GNSS高精度定位技术,结合匹配优化算法,对电铲及矿卡的生产数据进行统计。在实现对露天矿主要采矿设备的位置及工作状态的跟踪,实时监视矿卡及电铲的运行情况,适应采矿生产过程中情况的变化。系统以高精度GNSS技术为依托,利用RTK算法解算位置信息,线性规划算法模型为优化基础,无线通讯为数据传输手段,计算机技术为工具,在露天矿设备数量一定的情况下,实现对矿卡、电铲等采矿设备的实时优化管控、调度。

一种基于高精度定位的电力数据智能终端.pdf
一种基于高精度定位的电力数据智能终端,它包括一个以Cortex?A8为内核、支持音视频编解码等复杂算法,同时为后续扩展留有足够空间的终端系统,所述的终端系统内嵌有一LTE230通讯模块,并留有适应电力数据采集外业人员需要的3G/4G无线接口、留有常规互联网接口RJ?45、USB接口;所述的Cortex?A8内核相接有高精度北斗模块,支持亚米级高精度定位,并可以连接常见的主流CORS基站,提供持续稳定的RTK差分源数据;所述的Cortex?A8内核连接有近场免费通讯的蓝牙模块,连接有可与手机、其它PDA设备