
一种基于多维量测信息的航迹起始方法.pdf

秋花****姐姐

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多维量测信息的航迹起始方法.pdf
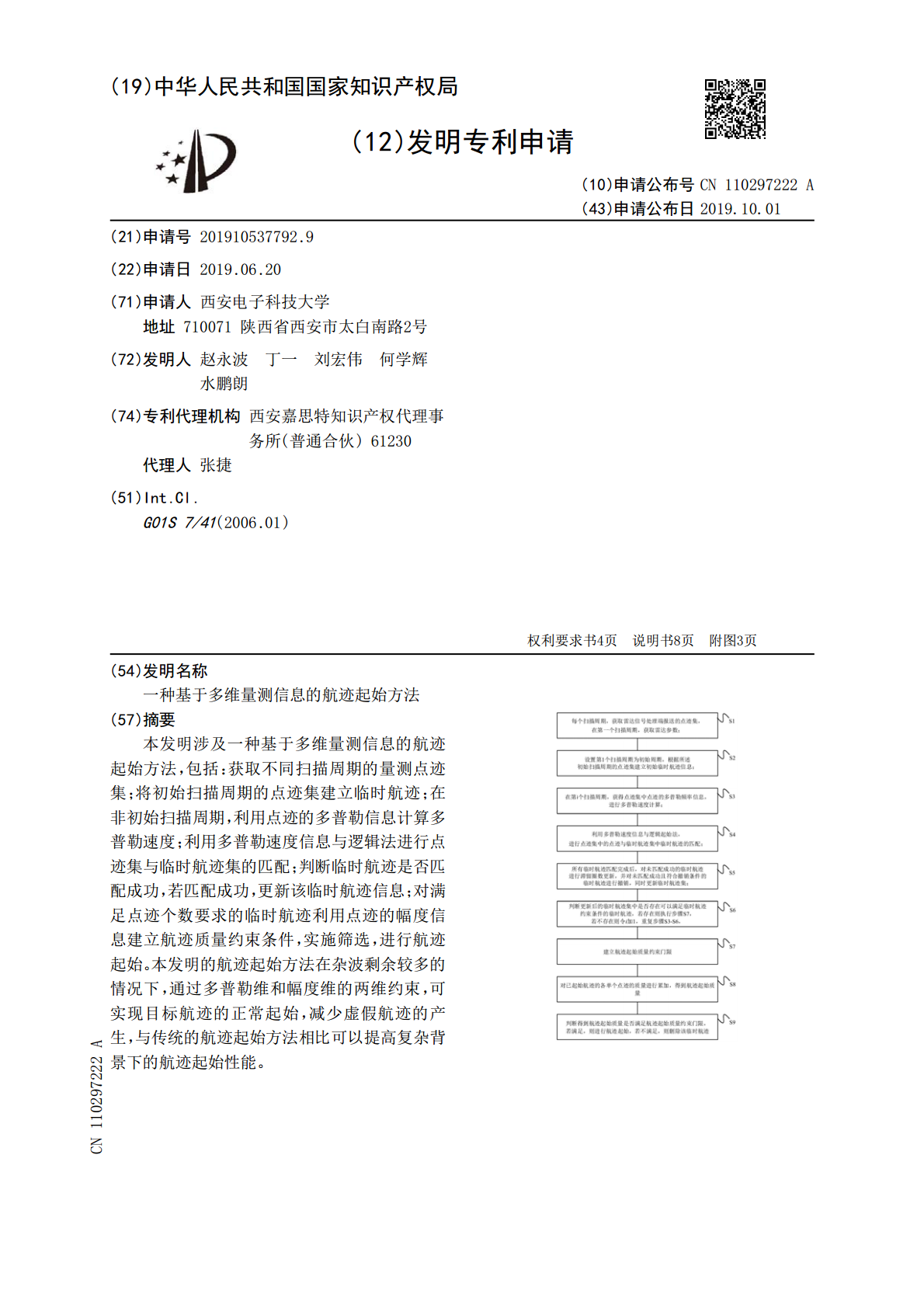
本发明涉及一种基于多维量测信息的航迹起始方法,包括:获取不同扫描周期的量测点迹集;将初始扫描周期的点迹集建立临时航迹;在非初始扫描周期,利用点迹的多普勒信息计算多普勒速度;利用多普勒速度信息与逻辑法进行点迹集与临时航迹集的匹配;判断临时航迹是否匹配成功,若匹配成功,更新该临时航迹信息;对满足点迹个数要求的临时航迹利用点迹的幅度信息建立航迹质量约束条件,实施筛选,进行航迹起始。本发明的航迹起始方法在杂波剩余较多的情况下,通过多普勒维和幅度维的两维约束,可实现目标航迹的正常起始,减少虚假航迹的产生,与传统的航
基于多维筛选并行Hough变换的航迹起始方法.pdf
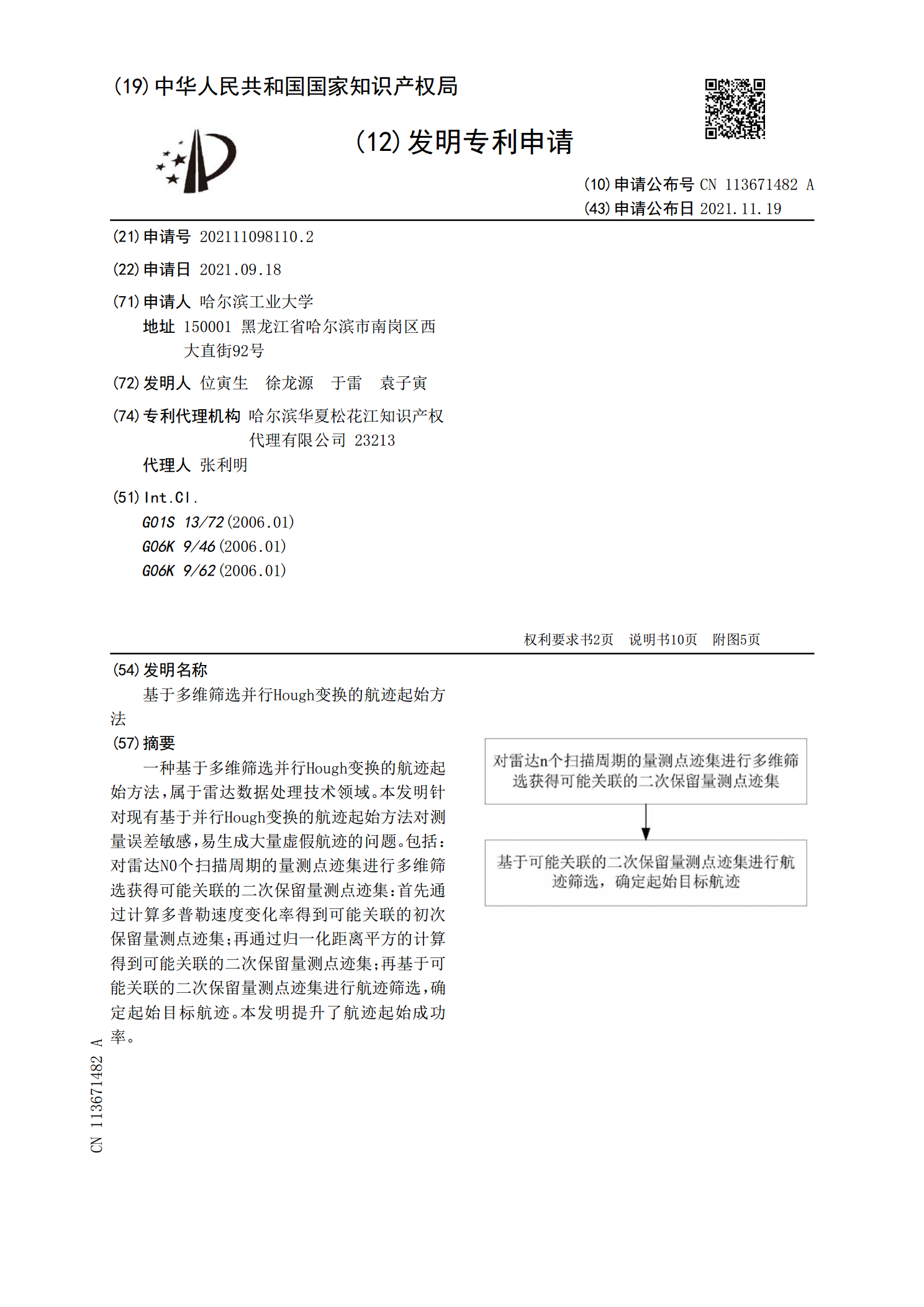
一种基于多维筛选并行Hough变换的航迹起始方法,属于雷达数据处理技术领域。本发明针对现有基于并行Hough变换的航迹起始方法对测量误差敏感,易生成大量虚假航迹的问题。包括:对雷达N0个扫描周期的量测点迹集进行多维筛选获得可能关联的二次保留量测点迹集:首先通过计算多普勒速度变化率得到可能关联的初次保留量测点迹集;再通过归一化距离平方的计算得到可能关联的二次保留量测点迹集;再基于可能关联的二次保留量测点迹集进行航迹筛选,确定起始目标航迹。本发明提升了航迹起始成功率。

一种基于CEC的航迹起始方法.docx
一种基于CEC的航迹起始方法基于CEC的航迹起始方法摘要:航迹起始是航空飞行控制中的重要环节,对于确保飞机的安全、准时到达目的地具有重要的意义。传统的航迹起始方法通常基于基于导航设备和空管的实时指令,但在特定情况下,如气象条件变化、飞机故障等情况下,这些方法可能不再适用。因此,本文针对传统起始方法的局限性,提出了一种基于航空控制器决策能力(CEC)的航迹起始方法。关键词:航迹起始、航空控制器决策能力、安全、准时、故障1.引言航迹起始是航空飞行控制中的一项重要任务,即确定飞机从起飞点到目的地的最佳航迹。传统

一种基于宽带雷达回波的航迹起始方法.docx
一种基于宽带雷达回波的航迹起始方法航迹起始是雷达信号处理的一个重要环节,目的是确定目标的起点并提供必要的起飞点数据,以便后续跟踪和识别。传统的起始方法主要基于目标的特征,例如目标的反射面积、峰值信号等,然而这些方法无法处理低信噪比环境和多目标干扰的情况。为了解决这些问题,本文提出了一种基于宽带雷达回波的航迹起始方法。一、宽带雷达原理宽带雷达是一种传感器,其工作原理类似于扫描电子显微镜。它使用宽带脉冲,将雷达发射的能量转换为精确定位的信号。它能够提供高分辨率的目标信号,并且在短时间内检测大范围内的物体。与传

基于位置信息和多普勒信息的雷达航迹起始方法.pdf
本发明提出了一种基于位置信息和多普勒信息的雷达航迹起始方法,用于解决现有顺序处理技术类的方法中存在的航迹起始效率低的技术问题。实现步骤为:计算最大不模糊速度;从第k次扫描的量测向量中选取航迹头并计算径向速度集合;根据径向速度建立距离约束条件;根据最大速度建立空间位置约束条件;在第k+1次扫描中,关联与航迹头处于同一多普勒通道且满足上述两个约束条件的量测向量;利用有效量测向量更新距离约束条件,并继续关联操作;按照航迹起始准则,建立稳定航迹;遍历第k次扫描得到的量测向量及对应的径向速度集合。本发明的航迹起始效