
北斗弱信号快速捕获方法.pdf

宜欣****外呢


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
北斗弱信号快速捕获方法.pdf
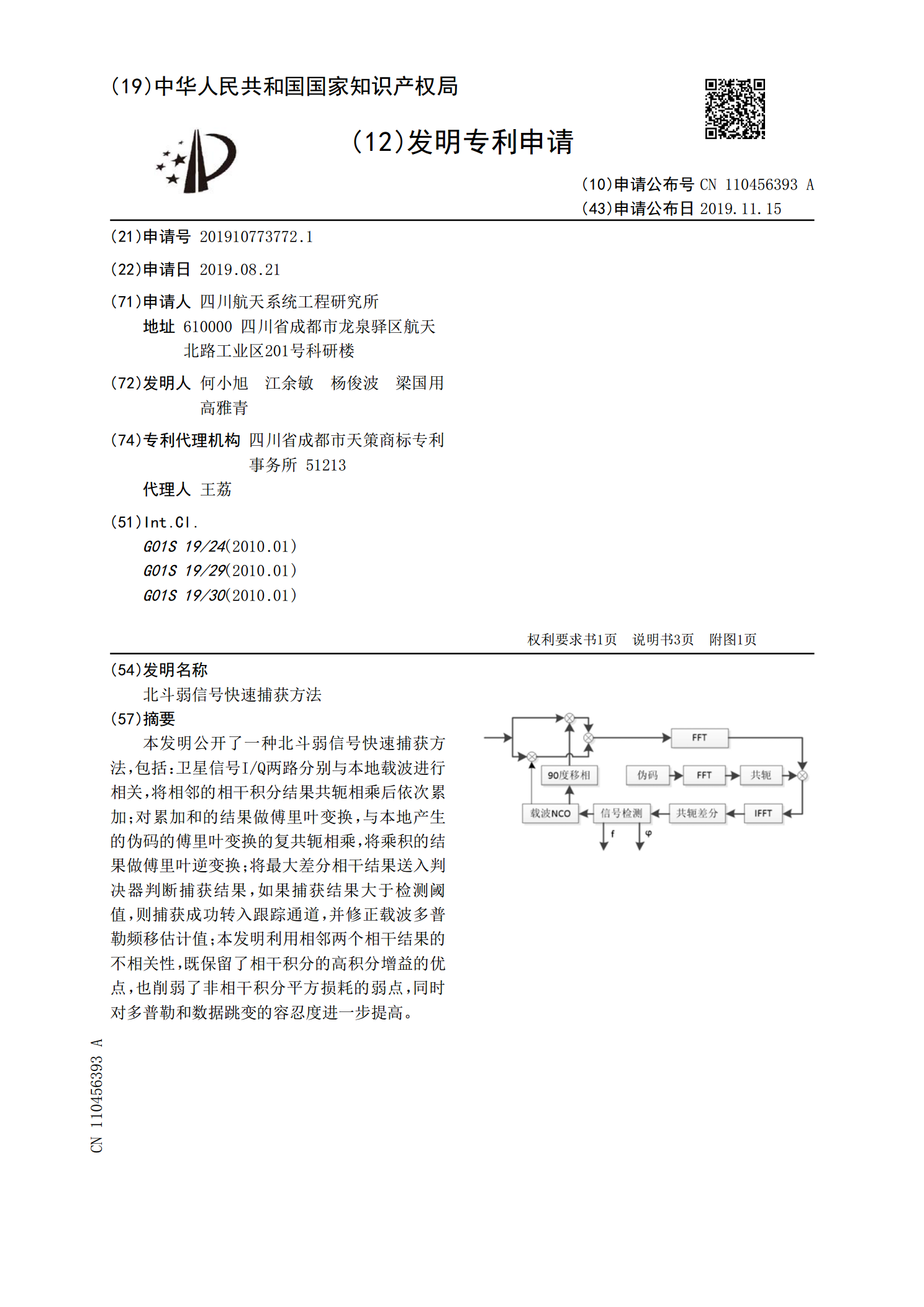
本发明公开了一种北斗弱信号快速捕获方法,包括:卫星信号I/Q两路分别与本地载波进行相关,将相邻的相干积分结果共轭相乘后依次累加;对累加和的结果做傅里叶变换,与本地产生的伪码的傅里叶变换的复共轭相乘,将乘积的结果做傅里叶逆变换;将最大差分相干结果送入判决器判断捕获结果,如果捕获结果大于检测阈值,则捕获成功转入跟踪通道,并修正载波多普勒频移估计值;本发明利用相邻两个相干结果的不相关性,既保留了相干积分的高积分增益的优点,也削弱了非相干积分平方损耗的弱点,同时对多普勒和数据跳变的容忍度进一步提高。

基于差分相关积分的北斗弱信号快速捕获方法.docx
基于差分相关积分的北斗弱信号快速捕获方法北斗弱信号捕获是现代导航领域中的一个重要问题,随着北斗系统的广泛应用,对于在复杂环境中捕获弱信号的要求也越来越高。本论文将介绍一种基于差分相关积分的北斗弱信号快速捕获方法,该方法能够有效地提高捕获效率,提高系统的定位精度。一、引言北斗导航系统是我国自主研发建设的卫星导航系统,具有全球覆盖、高精度、高可靠性等特点。然而,在一些复杂的信号环境中,如城市高楼、山区等地区,北斗信号容易受到遮挡和干扰,导致弱信号的捕获困难。因此,研究高效的捕获算法对于提高北斗导航系统的性能具

北斗卫星信号快速捕获方法研究.doc
毕业设计(论文)设计(论文)题目:北斗卫星信号快速捕获方法研究毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。作者签名:日期: 指导教师签名:日期:使用授权说明本

北斗卫星信号快速捕获方法研究.doc
毕业设计(论文)设计(论文)题目:北斗卫星信号快速捕获方法研究毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。作者签名:日期: 指导教师签名:日期:使用授权说明本

北斗卫星信号快速捕获方法研究.doc
(此文档为word格式,下载后您可任意编辑修改!)毕业设计(论文)设计(论文)题目:北斗卫星信号快速捕获方法研究毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。作者签名:日期: