
基于毫米波雷达的高空抛物检测方法.pdf

文宣****66

1/9
2/9

3/9
4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于毫米波雷达的高空抛物检测方法.pdf
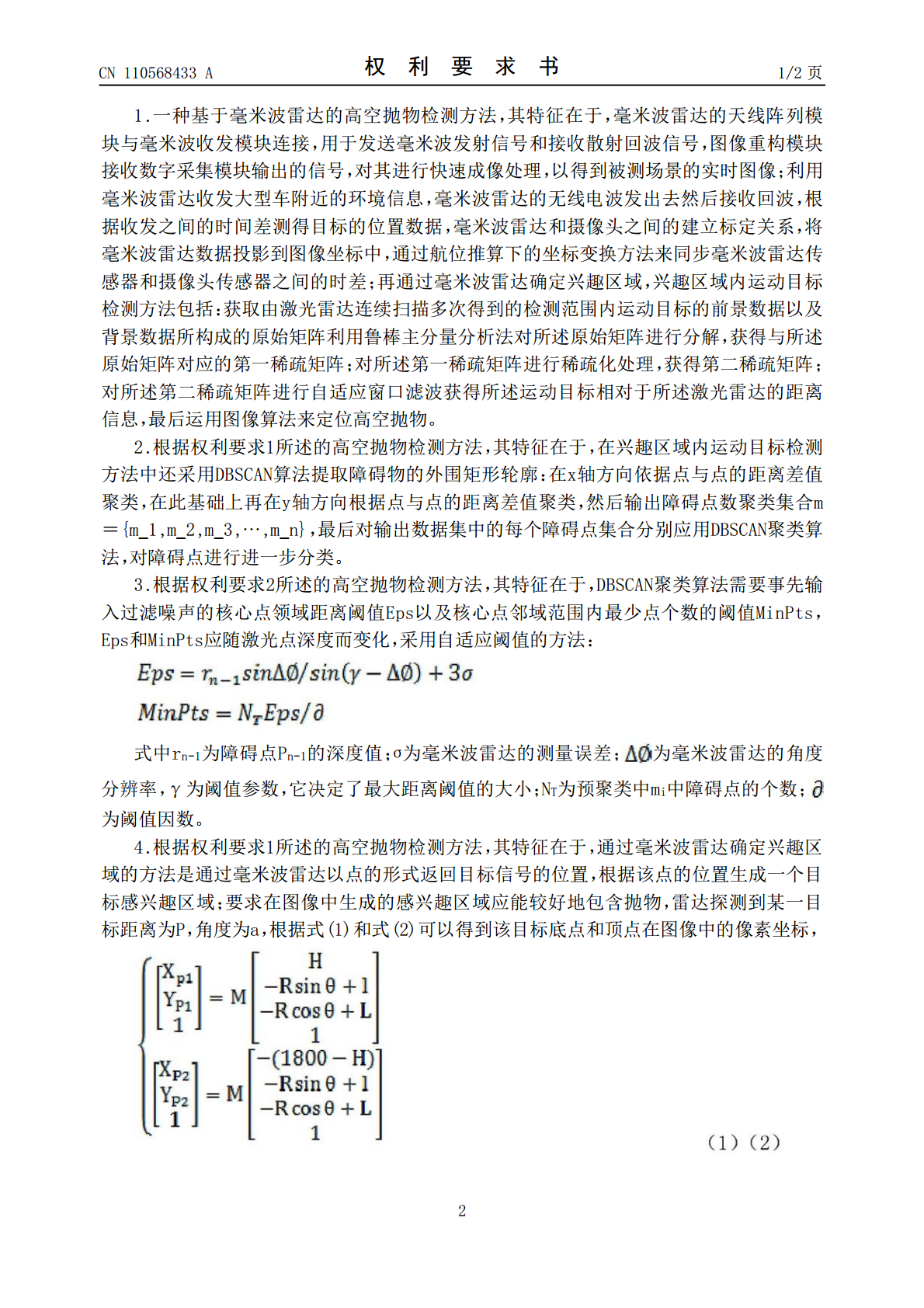
本发明公开了一种基于毫米波雷达的高空抛物检测方法,毫米波雷达的天线阵列模块与毫米波收发模块连接,用于发送毫米波发射信号和接收散射回波信号,毫米波雷达的无线电波发出去然后接收回波,根据收发之间的时间差测得目标的位置数据,毫米波雷达和摄像头之间建立标定关系,通过航位推算下的坐标变换方法来同步毫米波雷达传感器和摄像头传感器之间的时差;再通过毫米波雷达确定兴趣区域,最后运用图像算法来定位高空抛物。本发明具有如下有益效果:1.小天线口径、窄波束:高跟踪和引导精度;易于进行低仰角监测;2.毫米波雷达可以获得极高的角度

毫米波雷达及基于毫米波雷达的目标检测方法.pdf
本发明提供一种毫米波雷达及基于毫米波雷达的目标检测方法。毫米波雷达包括主片雷达和从片雷达,主片雷达包括第一芯片以及与第一芯片耦接的4根发射天线以及4根第一接收天线;从片雷达包括第二芯片以及与第二芯片耦接的4根第二接收天线;其中,4根发射天线沿第一方向等间距设置;4根第一接收天线沿在4根发射天线的第一侧第一方向依次排布,4根第二接收天线在4根发射天线的第二侧沿第一方向依次排布;4根发射天线、4根第一接收天线以及4根第二接收天线的控制时序相同,且4根发射天线发送的毫米波的相位依次间隔45度。
高空抛物检测方法、装置、高空抛物检测设备和存储介质.pdf
本申请涉及图像处理技术领域,尤其涉及一种高空抛物检测方法、装置、高空抛物检测设备和存储介质。该方法包括:获取待检测视频流,并对待检测视频流中的视频图像进行前景检测,得到前景检测结果;基于前景检测结果,确定前景累积图像和前景时序图像,前景累积图像是指叠加覆盖了待检测视频流中前景检测结果的视频图像,前景时序图像是指包括待检测视频流中前景检测结果以及时序信息的视频图像;根据所述前景累积图像和所述前景时序图像,确定所述待检测视频流中是否存在高空抛物事件。采用该方法,本申请可尽可能避免误检,提高高空抛物检测的效率。
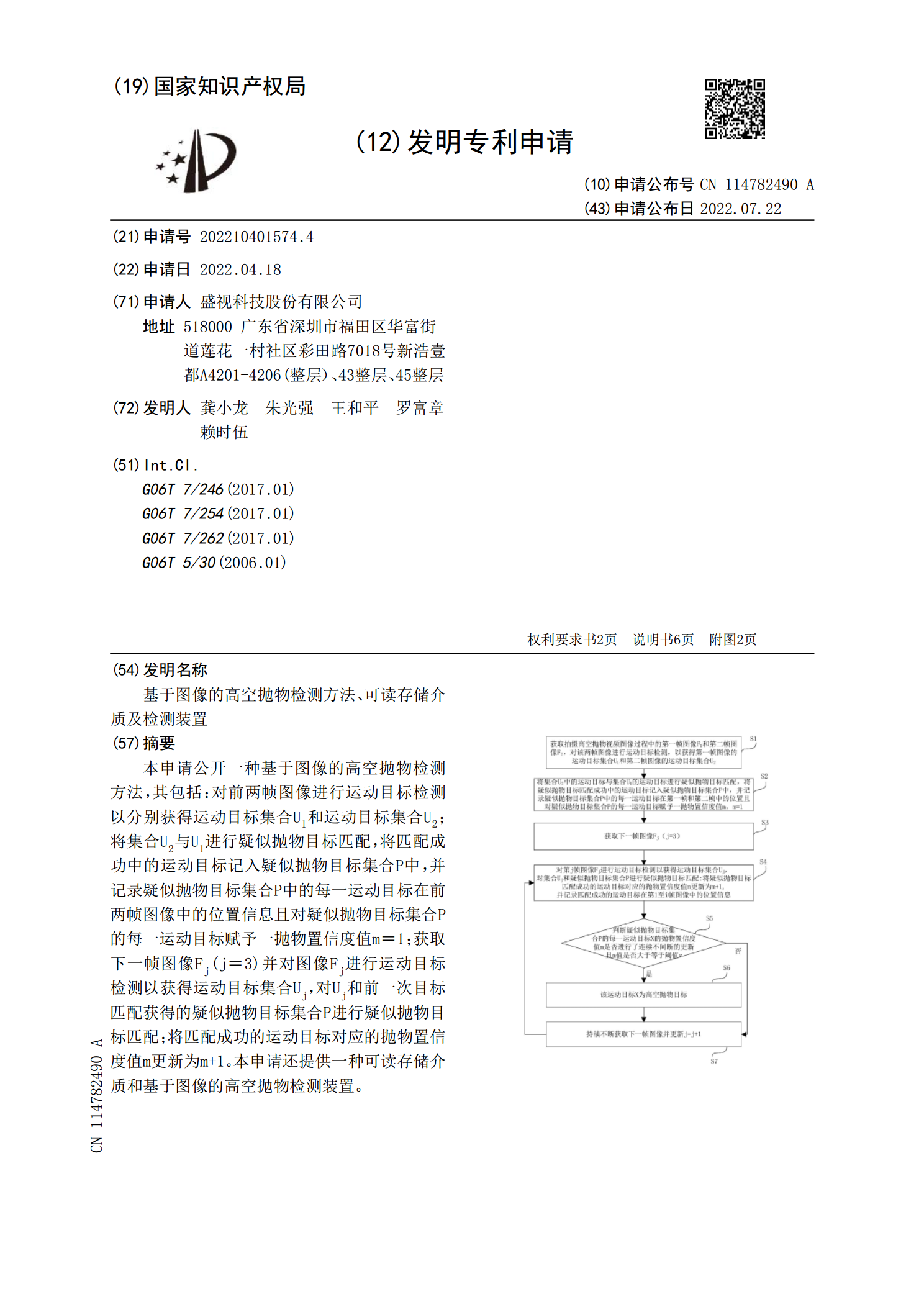
基于图像的高空抛物检测方法、可读存储介质及检测装置.pdf
本申请公开一种基于图像的高空抛物检测方法,其包括:对前两帧图像进行运动目标检测以分别获得运动目标集合U<base:Sub>1</base:Sub>和运动目标集合U<base:Sub>2</base:Sub>;将集合U<base:Sub>2</base:Sub>与U<base:Sub>1</base:Sub>进行疑似抛物目标匹配,将匹配成功中的运动目标记入疑似抛物目标集合P中,并记录疑似抛物目标集合P中的每一运动目标在前两帧图像中的位置信息且对疑似抛物目标集合P的每一运动目标赋予一抛物置信度值m=1;获取下
基于毫米波雷达辅助的车载视觉检测方法及系统.pdf
本发明涉及多传感器融合技术领域,具体的说是一种基于毫米波雷达辅助的车载视觉检测方法及系统,其特征在于,分别通过毫米波雷达模块和双目视觉模块获取目标雷达数据以及目标图像数据,对目标雷达数据和目标图像数据分别预处理后,搭建雷达与视觉信息融合模型,利用雷达与视觉信息融合模型对目标一致性进行判断,本发明与现有技术相比,能够有效减少事故发生的可能性,提高汽车的安全驾驶性能。