
一种激光多普勒测速仪数据反演方法.pdf

猫巷****傲柏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种激光多普勒测速仪数据反演方法.pdf
本发明提出一种激光多普勒测速仪数据反演方法,解决了激光多普勒测速仪数据处理时存在的时间分辨率固定,速度测量精度较低的问题。该方法包括以下步骤:1)参数设置;2)获取数据;3)计算带通滤波器的参数;4)数据处理;5)获取标记位;6)判断标记位Flag1的状态;7)计算N1;8)判断m与N1的大小关系;9)对数据进行截取;10)获取f_max;11)将结果放入数组f_max1(m)中;12)判断标记位Flag2的状态;13)计算剩余数据所需的窗口滑动次数N2;14)判断计数位n与N2的关系;15)获取f_ma

一种基于混合基FFT的激光多普勒测速仪测速方法.pdf
本发明公开了一种基于混合基FFT的激光多普勒测速仪测速方法,包括:按照预设采样间隔采集模拟光电信号,并进行预处理,得到离散多普勒信号序列;将离散多普勒信号序列依次分解为较短的子序列;构造DFT迭代过程的三项变量因子矩阵;三项变量因子矩阵为:输入序列矩阵、系数旋转因子矩阵和DFT旋转因子矩阵;基于三项变量因子矩阵对子序列进行DFT的逐层迭代计算,得到多普勒信号序列幅值频谱及其最大值,并求出频谱最大值的主频序号;根据频谱最大值的主频序号依次计算多普勒频率和最终流体速度。本发明可以有效化简复数运算,提高运算效率

激光多普勒测速仪信噪比及多普勒电流的研究.docx
激光多普勒测速仪信噪比及多普勒电流的研究激光多普勒测速仪是一种非接触式的速度测量仪器,具有高精度、高灵敏度、高分辨率、无干扰和适用于多种表面等优点。其工作原理基于多普勒效应,通过探测光束在运动物体表面反射后的频率变化量计算出运动物体的速度。在实际应用中,激光多普勒测速仪的信噪比是一个非常重要的指标。信噪比是指信号和噪声功率的比值,是反映测量精度和可靠性的一个重要指标。信噪比越高,测量结果越稳定、准确,而信噪比低则容易受到外界干扰,影响测量结果。因此,提高信噪比是激光多普勒测速仪的一个重要研究方向。目前有关

直接探测多普勒激光雷达数据处理和风场反演方法研究.docx
直接探测多普勒激光雷达数据处理和风场反演方法研究摘要本文主要探讨了多普勒激光雷达数据处理和风场反演方法的研究。首先介绍了多普勒激光雷达的基本原理和应用领域,然后详细讨论了多普勒激光雷达数据处理过程中的一些关键技术,包括信号滤波、速度解算、距离校准等。接着介绍了常见的风场反演方法,包括基于响应矩阵的反演方法、基于最小二乘法的反演方法以及基于气象学原理的反演方法等,重点探讨了这些方法的优缺点及其适用范围。最后,对未来多普勒激光雷达数据处理和风场反演方法的发展方向进行了展望。关键词:多普勒激光雷达;数据处理;风
一种应用于激光多普勒测速仪的速度测量方法与系统.pdf
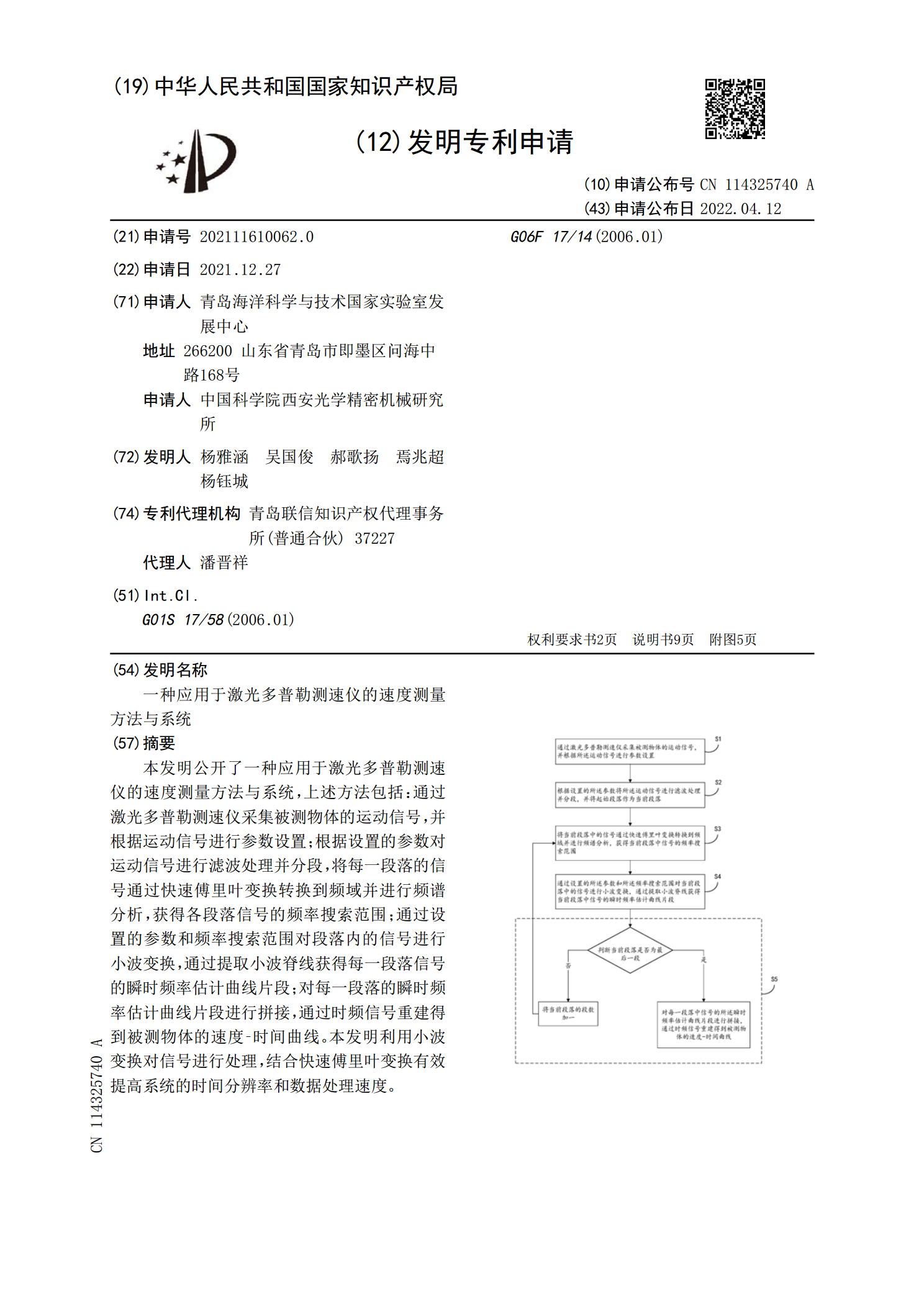
本发明公开了一种应用于激光多普勒测速仪的速度测量方法与系统,上述方法包括:通过激光多普勒测速仪采集被测物体的运动信号,并根据运动信号进行参数设置;根据设置的参数对运动信号进行滤波处理并分段,将每一段落的信号通过快速傅里叶变换转换到频域并进行频谱分析,获得各段落信号的频率搜索范围;通过设置的参数和频率搜索范围对段落内的信号进行小波变换,通过提取小波脊线获得每一段落信号的瞬时频率估计曲线片段;对每一段落的瞬时频率估计曲线片段进行拼接,通过时频信号重建得到被测物体的速度‑时间曲线。本发明利用小波变换对信号进行处