
自适应运动学模型辅助的GNSS载波相位与多普勒融合测速方法.pdf

努力****振宇


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自适应运动学模型辅助的GNSS载波相位与多普勒融合测速方法.pdf
本发明公开了一种自适应运动学模型辅助的GNSS载波相位与多普勒融合测速方法,当具备目标载体在第k时刻的观测向量时,利用第k‑1时刻的滤波结果进行滤波处理,得到第k时刻的状态向量先验估计

联合多普勒的载波相位精密测速方法.docx
联合多普勒的载波相位精密测速方法联合多普勒的载波相位精密测速方法摘要随着现代科技的发展,对于高精度速度测量的需求日益增长。而载波相位精密测速方法是一种有效的测速方法,可以实现高精度的速度测量。本文针对传统的载波相位精密测速方法存在的问题,提出了一种联合多普勒的载波相位精密测速方法,通过结合多普勒测速技术和载波相位测速技术,可以进一步提高测速的精度和稳定性。1.引言随着人类社会的发展和进步,对于高精度测量的需求越来越高。而速度是最基本的运动参数之一,对于许多领域的应用非常重要。传统的速度测量方法,例如使用雷
一种载波相位历元差分和多普勒观测融合测速方法.pdf
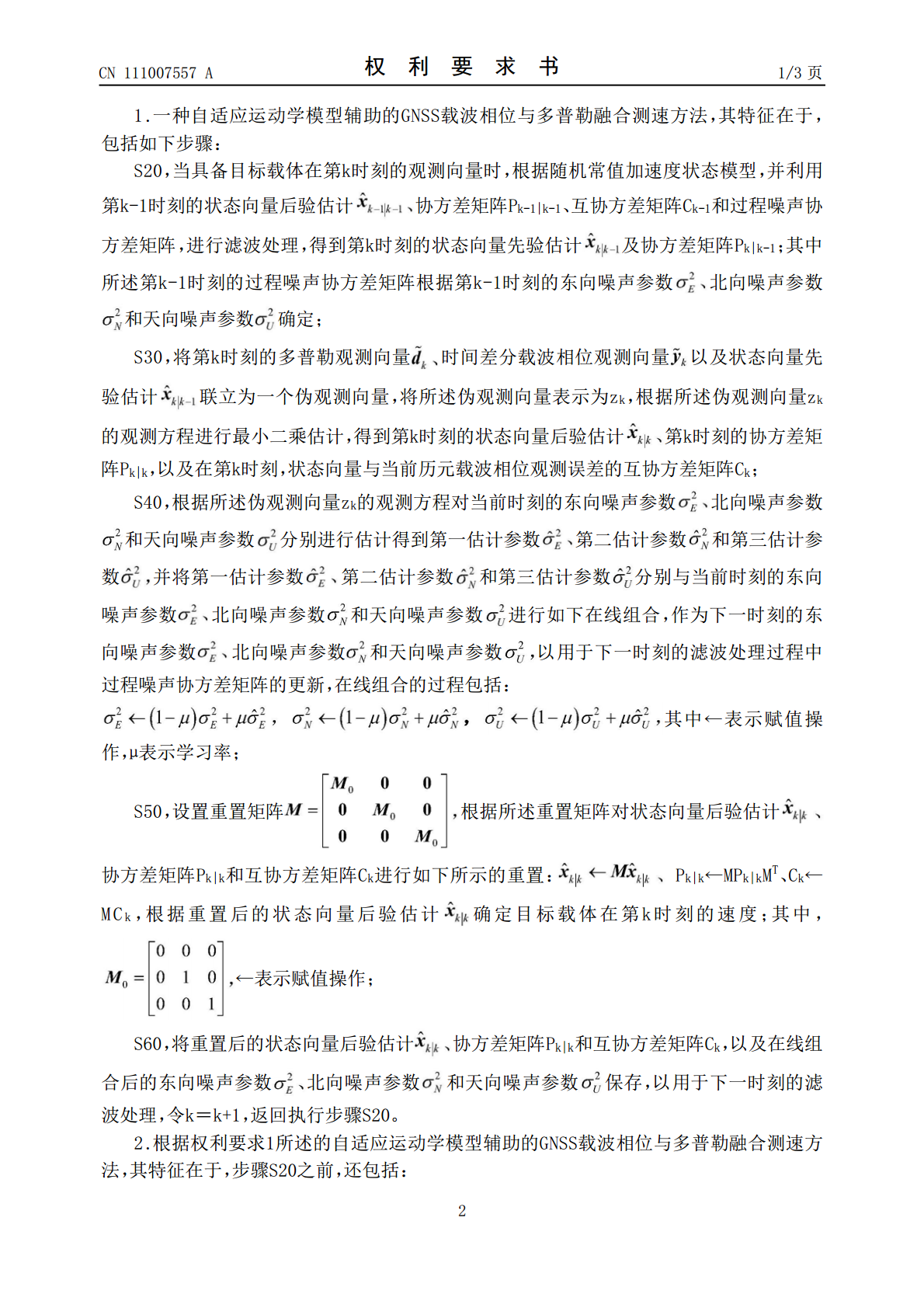
本发明提供了一种载波相位历元差分和多普勒观测融合测速方法,包括具体包括以下步骤:S1:获得包含载波相位和多普勒观测值的原始GNSS数据及测速数据处理需要的辅助产品,对获得的数据进行筛除和误差修正,将所述修正数据代入载波相位定位方程式;S2:将修正后观测方程在历元间进行差分,形成载波相位历元间差分测速方程,然后和多普勒测速方程进行联合,组建成融合不同观测值的测速方程;S3:根据卫星高度角和观测噪声采取分步定权方法确定相应的随机模型;S4:将观测方程线性化后,通过最小二乘算法X=(B

基于DDMR辅助的GNSS-R载波相位差测高方法.docx
基于DDMR辅助的GNSS-R载波相位差测高方法摘要GNSS-R载波相位差测高方法是一种基于反射信号的高精度测高技术,对于地球表面的测量和监测具有重要意义。然而,传统的GNSS-R技术在测量误差和信噪比等方面存在缺陷,难以得到较高的精度。为了解决这些问题,本文提出了一种基于DDMR辅助的GNSS-R载波相位差测高方法。该方法通过利用DDMR技术来增强GNSS信号的精度和可靠性,实现对载波相位差的高精度测量。实验结果表明,该方法不仅能够提高GNSS-R测量精度和可靠性,而且能够有效地消除多径效应和噪声污染等

双边缘相位调制激光多普勒测速系统及测速方法.pdf
双边缘相位调制激光多普勒测速系统及测速方法,涉及多普勒测速技术。本发明是为了解决现有的相位调制激光多普勒测速系统,无法同时利用信号光一倍调制频率拍频信号相位中的多普勒频移信息以及无法充分利用全部回波信号光中的多普勒频移信息的问题。本发明利用偏振分光棱镜,将回波信号光按照偏正分成两束,对每一束信号光都进行相同的正弦相位调制,并分别利用光电倍增管进行探测。通过两个电流值i