
基于雷达和光电的低慢小目标与海面小目标识别方法.pdf

书生****ma


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于雷达和光电的低慢小目标与海面小目标识别方法.pdf
本发明涉及一种基于雷达和光电的低慢小目标与海面小目标识别方法,主要适用于预警探测系统下低慢小目标与海面小目标分类识别。其主要流程是:首先雷达对光电进行目标指引,雷达与光电对目标进行复合跟踪;待雷达与光电对目标进行稳定跟踪后,调用雷达对目标进行高重频探测,同时调用光电对目标进行红外成像;然后分别提取目标的微多普勒调制特征和红外特征;利用目标微多普勒调制特征、红外特征结合目标运动特征和运动特征构造目标特征矩阵,最后结合线性二分类器进行低慢小目标与海面小目标分类识别。本发明所提供的方法可以充分发挥预警探测系统中
基于LSTM模型的脉冲多普勒雷达低慢小目标识别方法.pdf
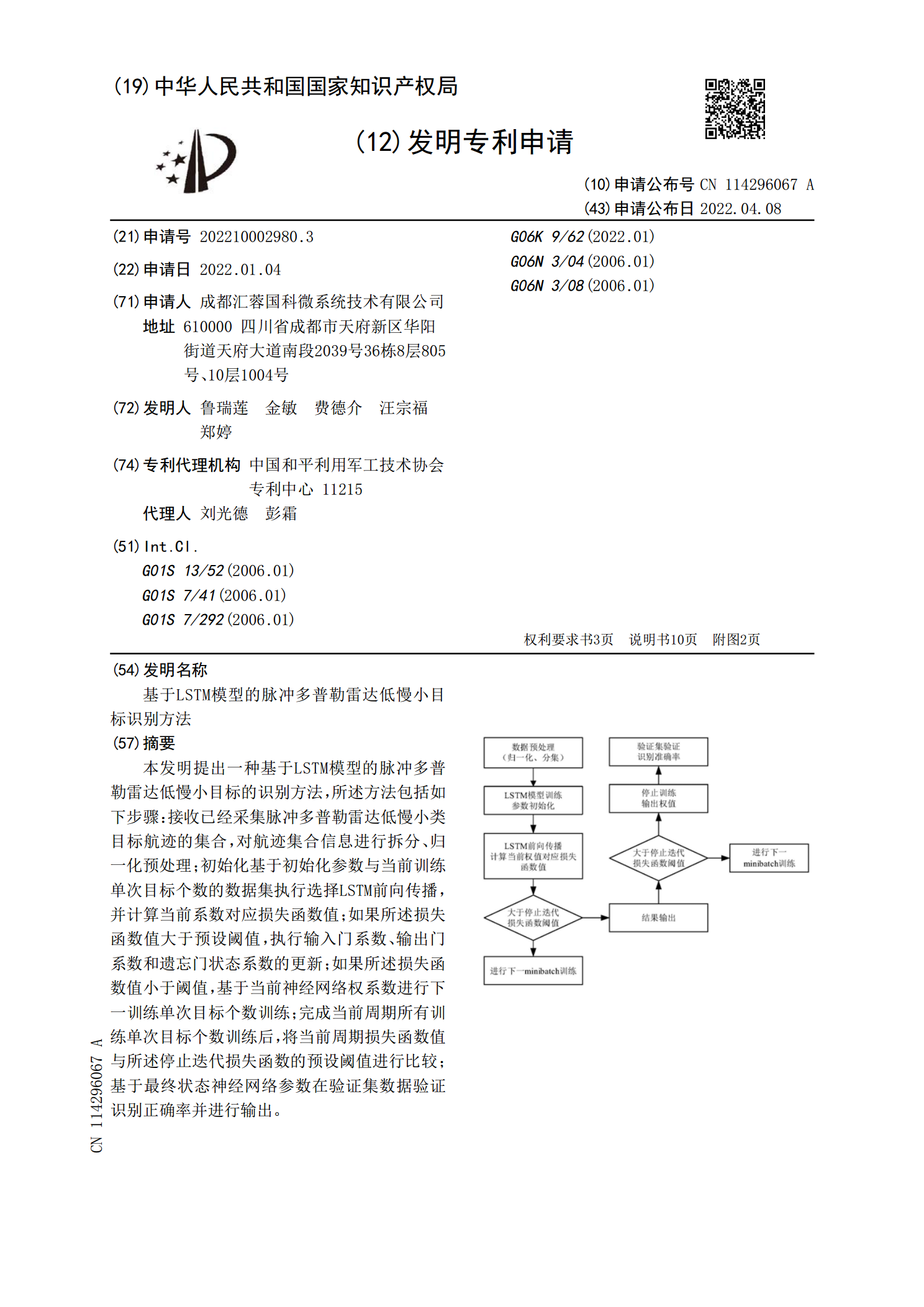
本发明提出一种基于LSTM模型的脉冲多普勒雷达低慢小目标的识别方法,所述方法包括如下步骤:接收已经采集脉冲多普勒雷达低慢小类目标航迹的集合,对航迹集合信息进行拆分、归一化预处理;初始化基于初始化参数与当前训练单次目标个数的数据集执行选择LSTM前向传播,并计算当前系数对应损失函数值;如果所述损失函数值大于预设阈值,执行输入门系数、输出门系数和遗忘门状态系数的更新;如果所述损失函数值小于阈值,基于当前神经网络权系数进行下一训练单次目标个数训练;完成当前周期所有训练单次目标个数训练后,将当前周期损失函数值与所

一种基于被动雷达的低慢小多目标检测方法及系统.pdf
本发明涉及一种基于被动雷达的低慢小多目标检测方法及系统,包括:首先,通过回波信号和参考信号之间的分段相关获得回波信号的相对时延谱;然后,对各分段相关值进行非相干累积,得到降噪后的目标回波信号相对时延谱;再次,用CFAR检测程序在距离域内检测目标,利用目标时延信息,获得相对时延处的分段相关信号采样;最后,利用ROOT‑MUSIC算法以高分辨率频率估计目标多普勒。本发明利用ROOT‑MUSIC高分辨率算法来估计目标多普勒频率,有效提高了目标的速度分辨率。

一种海面小目标探测雷达系统.pdf
本发明公开了一种海面小目标探测雷达系统,涉及雷达设备领域。该系统包括:频率综合器、发射机、接收机、信号处理机、显示控制组合、天线及伺服装置。本发明的目的在于提供一种固态相参体制的导航雷达,既利用针对大时宽带宽积线性调频信号的强大信号处理手段,获得探测距离远,距离分辨率高,杂波抑制能力强的优势,又利用同一脉冲重复周期内宽、中、窄脉冲相结合的组合脉冲波形,实现探测距离盲区较小的对全量程目标的同时测量。

基于二维有源相控阵雷达的低慢小目标检测与跟踪的任务书.docx
基于二维有源相控阵雷达的低慢小目标检测与跟踪的任务书一、任务背景及意义目前,随着科技的不断发展,雷达技术得到了广泛的应用。雷达技术可以用于多种领域,如民用领域、军事领域、航空领域等。其中,基于二维有源相控阵雷达的低慢小目标检测与跟踪技术,是一项非常重要的技术。在军事方面,低慢小目标通常意味着敌对方使用的小型、低速目标,如小型飞机、无人机、小型车辆等。这些目标规模小,移动缓慢,难以被侦测到,但却常常携带着重要的情报信息,这就需要有一种高效、灵敏的雷达技术来检测和跟踪这些目标,因此基于二维有源相控阵雷达的低慢