
一种基于径向速度的无偏量测转换的多普勒雷达目标运动状态估计方法.pdf

一只****呀盟


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于径向速度的无偏量测转换的多普勒雷达目标运动状态估计方法.pdf
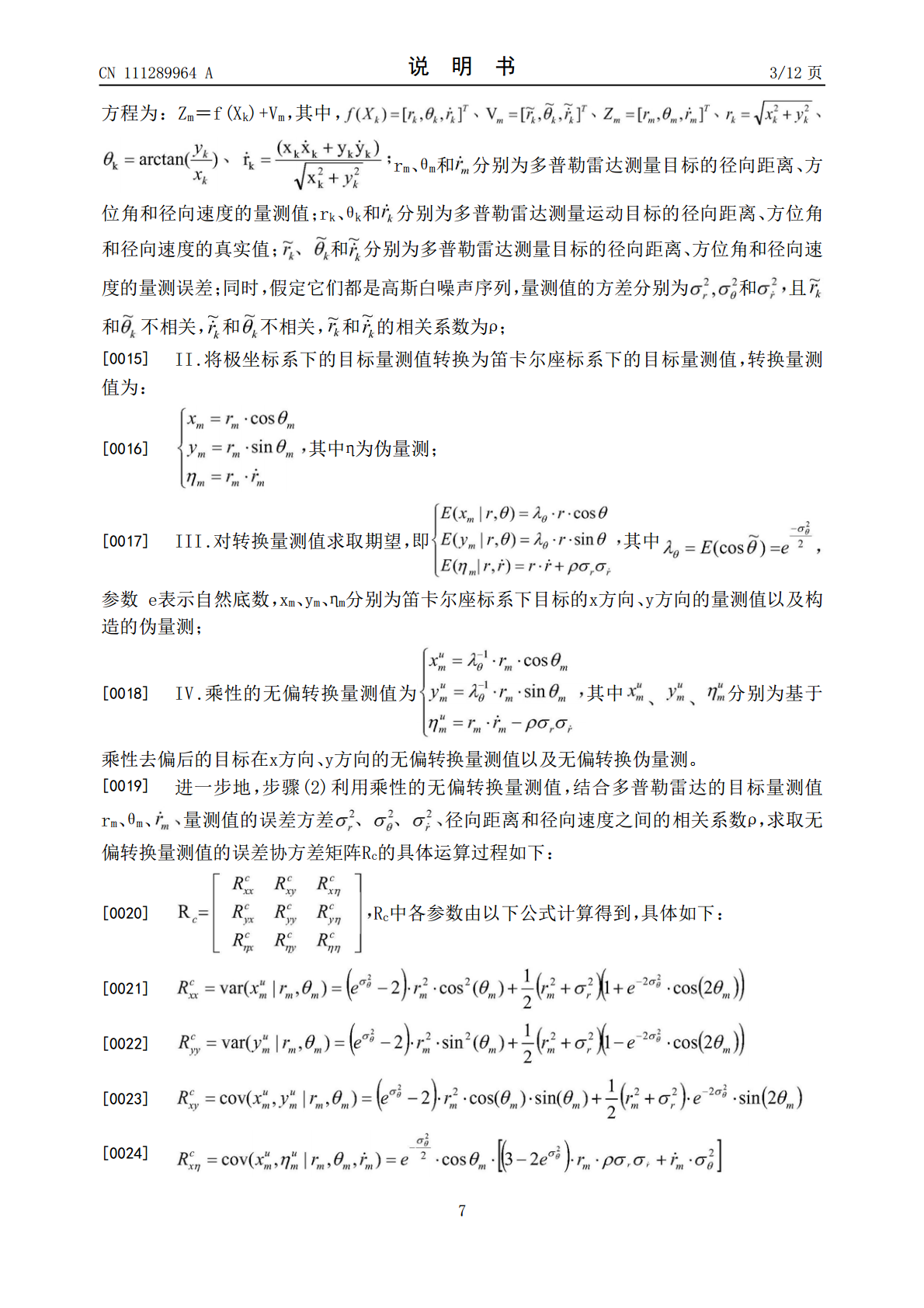
本发明属于多普勒雷达目标跟踪领域,具体涉及一种基于径向速度的无偏量测转换的多普勒雷达目标运动状态估计方法,包括以下步骤:基于多普勒雷达的量测值和量测误差,求取乘性的无偏转换量测等式;利用乘性的无偏转换量测等式,求取乘性的无偏转换量测值的误差协方差矩阵;基于前述误差协方差矩阵,采用卡尔曼滤波算法,对目标运动位置进行估计,得到目标运动估计位置坐标;基于径向速度和目标运动估计位置坐标,采用EKF算法,进行递推序贯卡尔曼滤波算法,完成目标运动状态估计。相对于现有目标运动状态估计方法,本发明所述方法对目标运动状态具

一种基于预测值量测转换的多普勒雷达目标跟踪方法.pdf
本发明公开了一种基于预测值量测转换的多普勒雷达目标跟踪方法。本发明首先求解位置预测值的转换量测误差的均值和协方差;再将基于直角坐标系下的位置预测值的转换量测误差的协方差阵应用到标准卡尔曼滤波算法中,即可得到基于预测位置的量测转换卡尔曼滤波算法,通过该算法进行目标位置估计,得到目标的估计位置。最后,使用多普勒信息和目标的估计位置使用二阶EKF变换,进行递推序贯卡尔曼滤波,完成目标跟踪。本发明用于雷达目标跟踪,能利用多普勒信息提升跟踪精度,且运算量一定。

一种基于多普勒量测自适应处理的雷达目标跟踪方法.pdf
本发明属于多普勒雷达目标跟踪领域,特别涉及一种基于多普勒量测自适应处理的雷达目标跟踪方法。本发明基于BLUE‑KF的位置量测滤波方法和自适应伪信息的选取,实现可处理多普勒量测的序贯滤波。其中,基于BLUE‑KF方法的位置量测滤波方法实现了基于预测值量测转换的无偏估计;同时利用基于预测值的转换伪量测,获得伪状态的无偏估计。在此基础上,基于伪量测误差协方差与伪状态估计误差协方差的差异度变化率自适应地选取转换伪量测或伪状态估计进行序贯滤波。本发明在系统能够同时获得目标位置量测和多普勒量测的情况下,实现对目标非线

基于卡尔曼滤波预测的无偏量测转换方法.docx
基于卡尔曼滤波预测的无偏量测转换方法摘要:本文介绍了一种无偏量测转换方法,该方法是通过使用卡尔曼滤波器预测将不连续的量测数据转换成连续的数据。该方法具有高精度和高效率的优点,适用于处理需要进行周期性或连续性量测的数据。我们还使用一个例子来演示该方法的有效性,并比较了我们方法和传统的方法的差异。结果表明,我们的方法明显优于传统方法。关键字:无偏量测转换;卡尔曼滤波;连续性量测;精度;效率Introduction量测值是现代科技中重要的数据来源。但是,一些特定的量测过程可能具有不连续性或具有周期性。例如,生物

基于单通道SAR的运动目标径向速度无模糊估计方法.pdf
本发明公开了一种基于单通道SAR的运动目标径向速度无模糊估计方法,主要解决现有技术中实现成本较高、运算量大、估计精度低的问题。其实现过程为:对雷达接收的运动目标回波信号进行距离脉压,将距离脉压结果转换到距离频率域,通过两视处理和距离向逆傅立叶变换得到运动目标距离脉压域两视信号,再将运动目标距离脉压域两视信号分别转换到多普勒频域,乘以方位向匹配函数,再经过干涉处理得到运动目标干涉结果;利用最小二乘线性拟合方法估计干涉结果的干涉相位随多普勒频率变化的斜率,根据该斜率估计运动目标径向速度。本发明具有系统实现成本