
用于监测机器的可旋转器具的方法和系统.pdf

康佳****文库


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于监测机器的可旋转器具的方法和系统.pdf
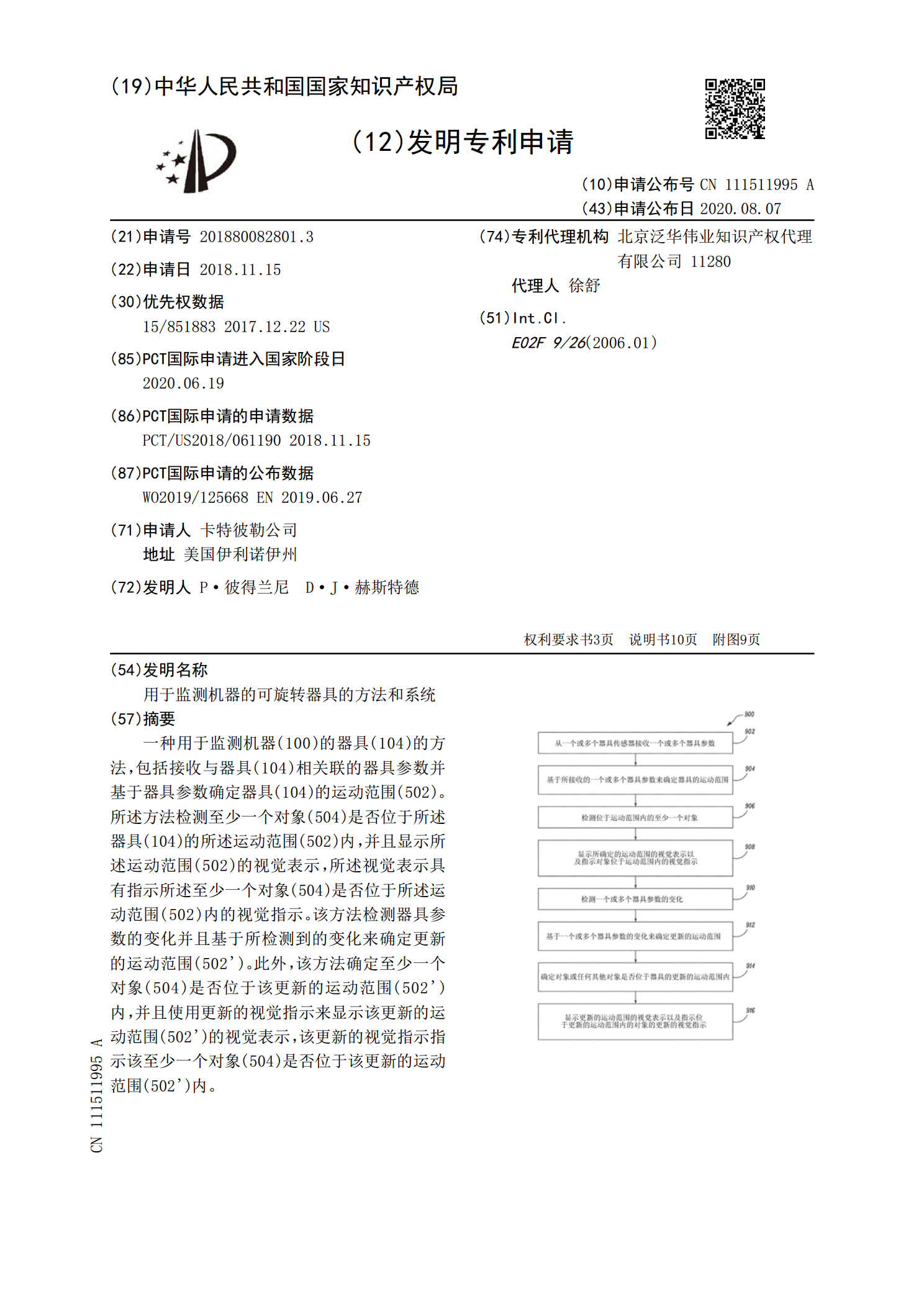
一种用于监测机器(100)的器具(104)的方法,包括接收与器具(104)相关联的器具参数并基于器具参数确定器具(104)的运动范围(502)。所述方法检测至少一个对象(504)是否位于所述器具(104)的所述运动范围(502)内,并且显示所述运动范围(502)的视觉表示,所述视觉表示具有指示所述至少一个对象(504)是否位于所述运动范围(502)内的视觉指示。该方法检测器具参数的变化并且基于所检测到的变化来确定更新的运动范围(502’)。此外,该方法确定至少一个对象(504)是否位于该更新的运动范围(5

用于监测可旋转构件的方法和装置.pdf
描述了一种用于监测可旋转构件的设备和相关方法,并且包括联接到所述可旋转构件的目标轮,以及布置成监测所述目标轮的传感器。所述传感器被配置成产生与所述目标轮的旋转相关联的信号。所述控制器与所述传感器通信并且包括指令集,所述指令集可执行以动态监测在所述目标轮旋转期间由所述传感器产生的信号,并且基于所述信号来确定所述传感器与所述目标轮之间的气隙的量值。所述传感器和所述目标轮之间的气隙的量值的变化可以基于所述信号来确定,并且与所述旋转构件相关联的故障可以基于气隙量值的变化来确定。

用于监测机器的舱室的系统和方法.pdf
提供了一种用于监测机器(100)的舱室(104)的系统(200)和方法(300)。系统(200)包括操作员存在传感器(204)、舱室压力传感器(206)、门传感器(208)和二氧化碳传感器(210),经配置分别产生第一输出信号、第二输出信号、第三输出信号和第四输出信号。系统(200)包括控制器(202),经配置选择性地处理第一输出信号、第二输出信号、第三输出信号或第四输出信号中的至少一个。控制器(202)进一步经配置基于对第一输出信号、第二输出信号、第三输出信号或第四输出信号中的至少一个的选择性处理来控制
用于监测旋转装置的监测系统、监测器和方法.pdf
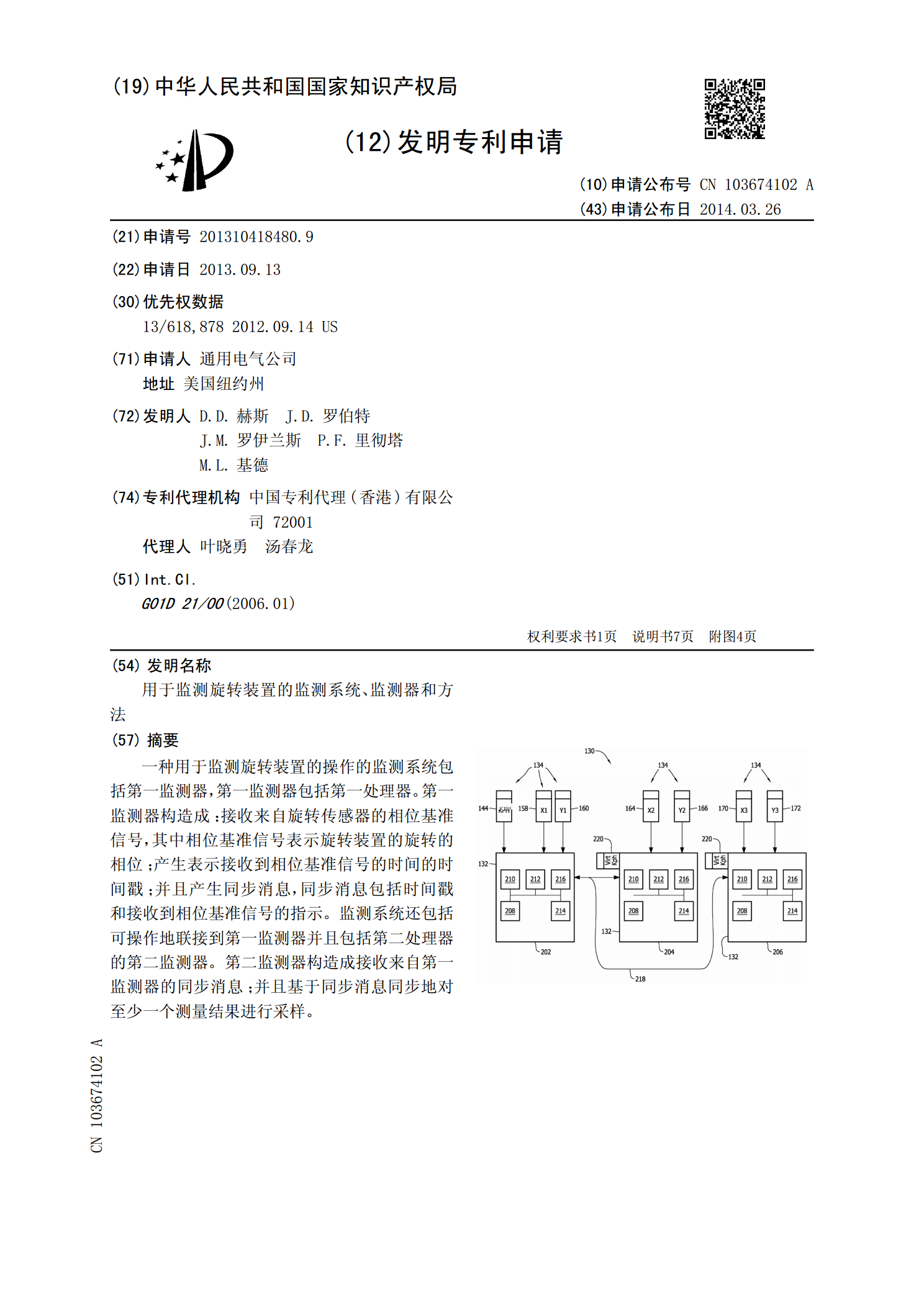
一种用于监测旋转装置的操作的监测系统包括第一监测器,第一监测器包括第一处理器。第一监测器构造成:接收来自旋转传感器的相位基准信号,其中相位基准信号表示旋转装置的旋转的相位;产生表示接收到相位基准信号的时间的时间戳;并且产生同步消息,同步消息包括时间戳和接收到相位基准信号的指示。监测系统还包括可操作地联接到第一监测器并且包括第二处理器的第二监测器。第二监测器构造成接收来自第一监测器的同步消息;并且基于同步消息同步地对至少一个测量结果进行采样。
用于旋转机器的盲缺陷检测系统和方法.pdf
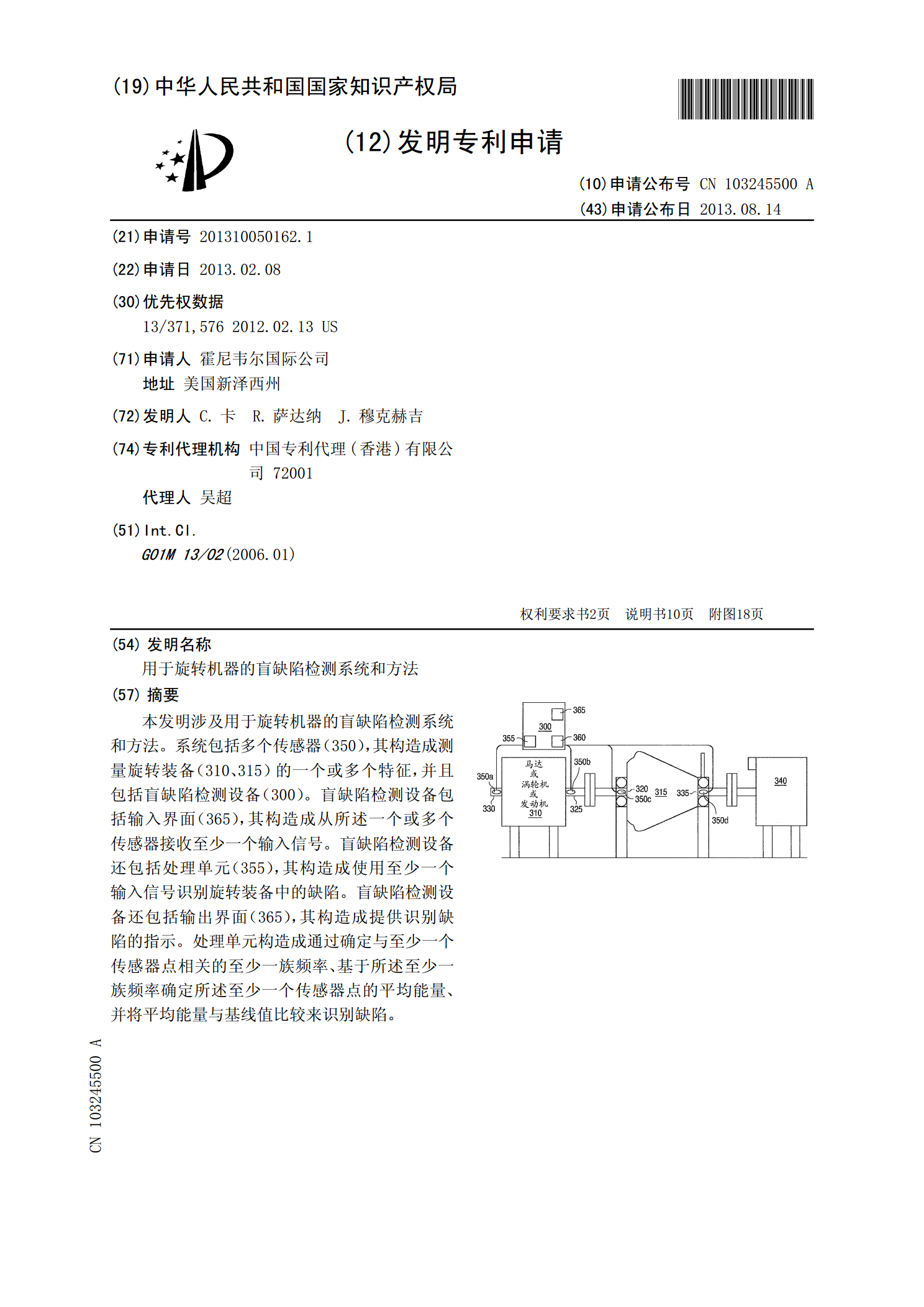
本发明涉及用于旋转机器的盲缺陷检测系统和方法。系统包括多个传感器(350),其构造成测量旋转装备(310、315)的一个或多个特征,并且包括盲缺陷检测设备(300)。盲缺陷检测设备包括输入界面(365),其构造成从所述一个或多个传感器接收至少一个输入信号。盲缺陷检测设备还包括处理单元(355),其构造成使用至少一个输入信号识别旋转装备中的缺陷。盲缺陷检测设备还包括输出界面(365),其构造成提供识别缺陷的指示。处理单元构造成通过确定与至少一个传感器点相关的至少一族频率、基于所述至少一族频率确定所述至少一个