
汽车防撞雷达信号处理方法和系统.pdf

俊凤****bb


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

汽车防撞雷达信号处理方法和系统.pdf
本发明公开了汽车防撞雷达信号处理方法和系统,涉及雷达信号处理技术领域,解决了现有的方法在汽车防撞雷达目标探测时的缺陷。对汽车防撞雷达不同通道的回波数据沿距离向进行脉冲压缩;接着对不同通道回波数据沿方位向进行多普勒处理;随后在保存不同通道距离多普勒数据的同时,将不同通道距离多普勒数据进行数字波束形成并完成目标检测,得到目标的距离和速度信息;最后根据目标检测结果在不同通道距离多普勒数据中提取测角向量,最终得到目标角度信息。本发明不仅可以增强汽车防撞雷达的实时处理能力,而且可以缓解现有汽车防撞雷达内存资源紧张的

汽车防撞雷达信号处理的设计与实现的中期报告.docx
汽车防撞雷达信号处理的设计与实现的中期报告中期报告一、项目背景随着人们对汽车安全性能的日益关注,汽车防碰撞技术成为了汽车行业发展的必然趋势。车载雷达成为了其中的重要组成部分,通过对前方障碍物的探测和分析,提供了防碰撞的支持。而汽车防撞雷达信号处理的设计和实现是车载雷达实现防碰撞的关键技术之一。本项目旨在设计和实现汽车防撞雷达信号处理方案,以支持车载雷达对前方的障碍物进行快速准确的探测,并提供支持防碰撞的可靠数据,从而提升汽车的安全性能。二、项目目标1.设计基于FMCW技术的防撞雷达信号处理方案,包括信号源

SOPC技术在汽车防撞雷达信号处理中的应用.docx
SOPC技术在汽车防撞雷达信号处理中的应用SOPC技术在汽车防撞雷达信号处理中的应用概述随着汽车行业的发展,人们对于汽车的安全性能要求也不断提高。其中,车辆防撞技术是保障乘客生命安全的重要手段。而汽车防撞雷达技术则是实现这一目标的主流方向之一。为了更好地提高汽车防撞雷达的信号处理效率和精度,SOPC技术被引入其中。本文将在阐述SOPC技术的基本原理和优势的基础上,重点探讨其在汽车防撞雷达信号处理中的应用,为进一步推进该技术在汽车行业的应用提供参考。一、SOPC技术的基本原理和优势(1)SOPC技术的基本原
气象雷达信号处理方法和系统.pdf
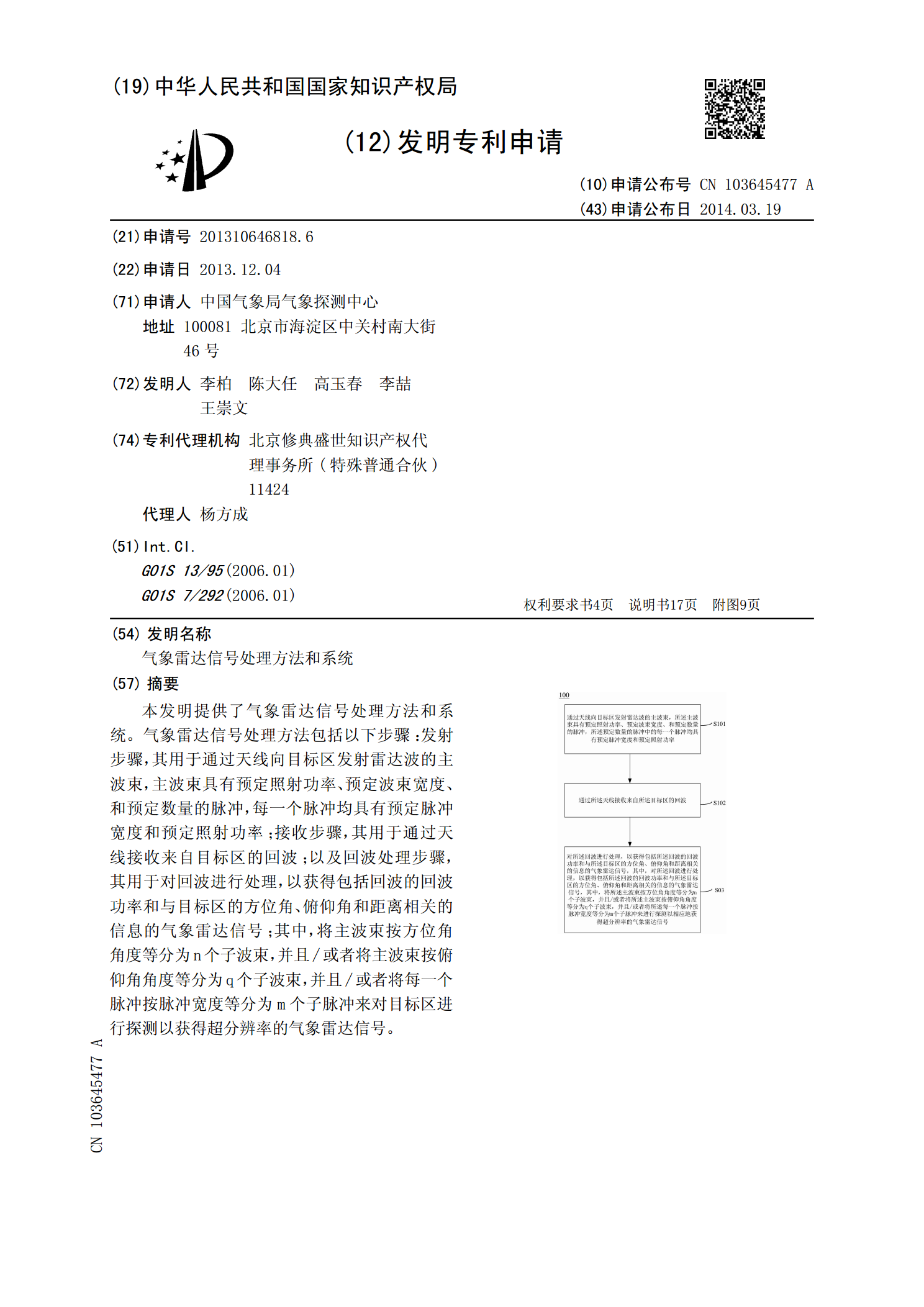
本发明提供了气象雷达信号处理方法和系统。气象雷达信号处理方法包括以下步骤:发射步骤,其用于通过天线向目标区发射雷达波的主波束,主波束具有预定照射功率、预定波束宽度、和预定数量的脉冲,每一个脉冲均具有预定脉冲宽度和预定照射功率;接收步骤,其用于通过天线接收来自目标区的回波;以及回波处理步骤,其用于对回波进行处理,以获得包括回波的回波功率和与目标区的方位角、俯仰角和距离相关的信息的气象雷达信号;其中,将主波束按方位角角度等分为n个子波束,并且/或者将主波束按俯仰角角度等分为q个子波束,并且/或者将每一个脉冲按

汽车防撞雷达信号处理的设计与实现的任务书.docx
汽车防撞雷达信号处理的设计与实现的任务书任务书任务名称:汽车防撞雷达信号处理的设计与实现任务类型:设计与实现任务背景:随着汽车技术的不断发展,我们越来越依赖汽车的出行方式,特别是在大城市中,交通拥堵严重,导致道路交通事故频繁发生。为了保障车辆行驶的安全性,在汽车上加装防撞雷达成为了一种趋势。防撞雷达可以通过探测前方距离,及时提醒驾驶员采取避让措施,从而降低事故发生率。为了使防撞雷达探测更加精准,需要对探测到的信号进行处理。本项目旨在设计与实现一套汽车防撞雷达信号处理系统,能够接收并实时处理雷达探测得到的距