
用于确定对象的至少一个参数的方法和装置.pdf

永梅****33


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于确定对象的至少一个参数的方法和装置.pdf
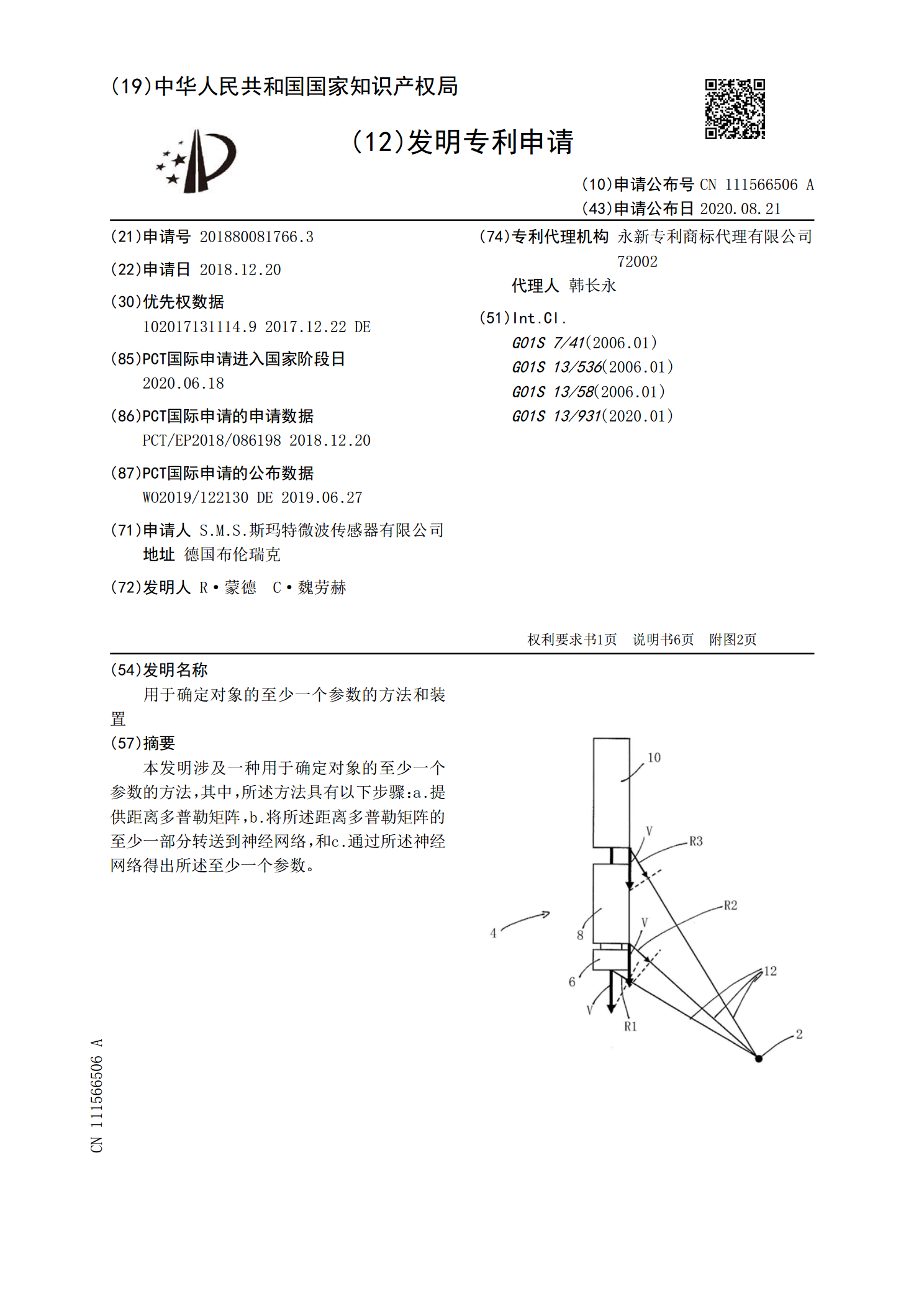
本发明涉及一种用于确定对象的至少一个参数的方法,其中,所述方法具有以下步骤:a.提供距离多普勒矩阵,b.将所述距离多普勒矩阵的至少一部分转送到神经网络,和c.通过所述神经网络得出所述至少一个参数。

用于确定至少一个行为参数的方法.pdf
本发明涉及一种用于确定佩戴者的至少一个行为参数以便设计用于这位佩戴者的眼镜架的眼科镜片的方法,该方法包括以下步骤:a)对与该佩戴者的头部的第一三维表示相对应的第一数据集进行采集,b)基于这个数据集来确定该佩戴者的头部的至少三个具体点的相对空间位置,c)对与该佩戴者的头部在自然姿势下的第二表示相对应的第二数据集进行采集,该第二表示包括该佩戴者的头部的这三个具体点中的每一个具体点的至少一张图像,d)在所述步骤c)的表示上标识该佩戴者的头部的所述具体点中的每一个具体点的图像,在步骤b)中已经确定这些具体点的相对

用于确定至少一个眼睛像差的装置和方法.pdf
本发明涉及一种用于确定用户的至少一只眼睛(112)的眼睛像差的装置(110)和方法(210),该装置(110)包括:‑波前感测单元(128),用于测量由至少一个光束(118)构成的至少一个光学波前,其中该用户的至少一只眼睛(112)的眼睛像差从该至少一个光学波前来确定;‑至少一个衍射元件,用于在该至少一个光束(118)中在两个子午面内以如下方式产生多重衍射级(168):该多重衍射级(168)在该波前感测单元(128)上和在该用户的至少一只眼睛(112)中是空间分离的。该装置(110)和方法(210)允许在

用于确定人的眼睛的至少一个参数的方法.pdf
本发明涉及一种用于确定人的眼睛的至少一个光学参数的方法,该方法包括:‑在该人的眼睛的视网膜上显示至少两个清晰图像,该至少两个图像包括目标并且由基本上聚焦在该眼睛的瞳孔的平面中的至少两个不同位置的两个光束承载;‑基于该人的与每个图像中的该目标的参数变化相关的反馈来适配该图像中的该目标的参数;以及‑基于对每个图像中的该目标的该参数的适配来确定该人的眼睛的该至少一个光学参数。

用于显示至少一个视觉对象的方法和电子装置.pdf
根据某些实施例,提供一种电子装置,所述电子装置可以包括相机、显示器、与所述相机和所述显示器可操作地耦合的处理器、和与所述处理器可操作地耦合的存储器,其中,所述存储器可以存储指令,所述指令在被执行时,使得所述处理器:将与所述电子装置相关的所购买物品的信息存储在所述存储器中;在存储所述物品信息后,在所述显示器上显示使用所述相机采集的图像作为预览图像;识别所述图像中与所述物品相对应的至少一个对象;基于识别出所述图像中的至少一个对象与所述物品相对应,获取至少一个视觉对象的信息;并且在所述显示器上将所述至少一个视觉